
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
一种低成本的七自由度机器人控制器
Morgan Quigley,Alan Asbeck,Andrew Ng
摘要
本文介绍了一种新型低成本系列弹性机械臂的设计。该机械臂的独特之处在于,它能够实现预期任务的合理性能(无齿隙、小于3毫米的重复性、以1.5米/秒的速度移动、2千克的有效载荷),但其零件成本明显低于同类机械手。本文探讨了在实现这种价格与性能相结合的过程中所做出的设计决策和权衡。这个新的,对人安全的手臂设计也可以描述为使用步进电机与一系列弹性传输近端四自由度,和非系列弹性机器人伺服远端三自由度组成。本文对此设计进行了权衡和讨论,特别是在人身安全和控制带宽方面。手臂被用于演示煎饼烹饪(浇面糊、翻转煎饼),使用手臂的固有顺应性帮助与物体进行交互。
简介
由于高精度的执行机构和部件的定制加工,许多机械手非常昂贵。我们认为,如果合理性能的机械臂在价格上大大降低,那么机械控制的研究可以更快地得到发展。可承受性的提高可导致设备更广泛的采用,反过来又可导致相关领域更快的进展——这是许多其他领域的趋势[1]。然而,大幅降低成本将需要设计上的权衡和妥协。
有许多角度可以用来评估机械臂,例如反冲、有效载荷、速度、带宽、可重复性、合规性、人身安全和成本等等。在机器人研究中,这些角度中的一些比其他角度更重要:对于抓取和对象操作,高重复性和低反冲性是重要的。有效载荷必须足以吊起研究对象。如果要在靠近人或教室的地方使用机械手,则人身安全至关重要。
机器人研究的某些领域需要高带宽、高速的机械手。然而,在许多研究环境中,速度和带宽可能不那么重要。例如,在对象操作、服务机器人或其他利用复杂视觉处理和运动规划的任务中,计算通常需要大量时间。这导致实际的机器人运动需要占总任务时间的一小部分。此外,在许多实验室设置中,操纵器的运动通常被故意减慢,以给程序员时间对意外碰撞或意外运动作出反应。
在本文中,我们提出了一个与许多进行高端研究的机械臂具有类似的性能的机械臂,但将单件成本大幅降低4135美元。
图1 本文介绍的低成本柔性机械手。本文介绍了一种以刮刀作为末端执行器的演示应用。为了便于原型制作,用激光切割胶合板作为主要的结构材料。
装运产品必须包括间接费用、额外的设计支出、测试成本、包装,以及可能的技术支持,这使得直接与研究原型的零件成本进行比较相当困难。然而,我们记录了我们的机械手的零件成本,以便大致了解与现有商用机械手相比可能降低的成本。
我们的实验证明,使用低成本的制造技术可以实现毫米级的重复性,而不需要通常用于制造机器人的三维加工过程。我们选择了一组要求,以确保手臂可用于操纵研究:
- 人性化的工作空间
- 7自由度(DOF)
- 有效载荷至少为2千克(4.4磅)
- 人的安全:
符合或易于反向驱动
4公斤以下飞行质量
- 3 mm以下的重复性
- 最大速度至少为1.0mls
- 零反坐
为了以尽可能低的成本满足这些要求,开发了一种新的机械臂设计。机械臂采用低成本的步进电机,结合同步带和电缆驱动,以实现无齿隙性能,以牺牲昂贵、紧凑的齿轮头的成本和增加的机械臂容量。为了实现人身安全,采用了一系列弹性设计,并通过保持电机靠近地面,将臂的飞行质量最小化。得到的原型如图1所示。
本文的简要概述如下。第二节概述了机器人研究中使用的其他机械臂。第三节概述了臂的设计,并讨论了其独特的驱动方案的权衡。第四节讨论了系列一致性方案,第五节、第六节和第七节分别讨论了传感、性能和控制。第八节讨论了机器人手臂在煎饼制作任务中的应用,并得出结论。
第二章 相关研究
A.机械臂有关研究
当今机器人研究中使用了大量的机械臂,其中许多具有独特的特点和设计标准。在本节中,我们将讨论一些最近广泛使用和/或有影响的机械臂。
barrett-wam[2],[3]是一种电缆驱动的机器人,以其高的反推性和流畅、快速的操作著称。它具有高速(3 m/s)操作和2 m m重复性。
MEKA A2手臂[4]是一系列弹性的,用于人与人之间的互动;其他定制的带有系列弹性手臂的机器人包括COG、DOMO、OBRERO、Twendy One和敏捷手臂[5]、[6]、[7]、[8]、[9]。Meka臂和Twendy臂使用谐波驱动齿轮头,而Cog使用行星齿轮箱,Domo、Obrero和Agile臂使用滚珠丝杠;机器人都使用不同的机构来实现其系列弹性。由于符合序列,这些臂的控制带宽较低(小于5赫兹),但这似乎并未限制它们在操纵研究中的使用。斯坦福大学已经开发了几种人体安全机械臂,采用宏-微驱动方法,将一系列弹性执行机构与一个小电机结合起来,以增加带宽[10],[11]。
PR2机器人[12],[13]有一个独特的系统,使用被动重力补偿机制,因此手臂可以在任何配置中浮动。由于臂的大质量已经得到支撑,因此使用相对较小的电机来移动臂和支撑有效载荷。这些小电机提供了人身安全,因为它们可以很容易地作为背景,因为它们的齿轮比很低。
DLR-LWR III臂[14]、Schunk轻量级臂[15]和Robonaut[16]均使用直接安装在每个接头上的电机,带有谐波驱动齿轮头,以提供零间隙的快速运动。这些臂的有效载荷比本节讨论的其他臂稍高,范围为3-14千克。它们不是为人身安全而设计的,具有相对较大的飞行质量(对于DLR-LWR接近14 kg),尽管已经进行了与DLR-LWR III的演示,其中包含一个远端力/扭矩传感器,该传感器使用臂的高带宽在检测到碰撞时快速停止。
在之前讨论过的机械臂中,那些商用的机械臂都比较昂贵,最终用户的购买价格远高于10万美元。然而,有一些低成本的机械手用于研究的例子。DynaMaid机器人[17]的手臂由Robotis Dynamixel Robotics Servos制成,它轻便紧凑。该机器人有一个人类尺度的工作空间,但其有效载荷(1千克)比前面讨论的武器类别要低。它的总成本至少是3500美元,这只是dynamicxel servos的价格。在运行中的视频中,它看起来有点欠采样。
Kuka Youbot机械臂是一种新型的5自由度机械臂,用于机器人研究[18]。它的工作范围相对较小,仅超过0.5m3,重复性为0.1 mm,有效载荷为0.5 kg。它有定制的、紧凑型的电机和齿轮头,在写作时售价为14000欧元。
B.使用步进电机的机器人手臂
许多机器人手臂都是用步进电机制造的。Pierrot和Dombre [19],[20]讨论了步进电机如何为Hippocrate和Dermarob医疗机器人的人身安全做出贡献,因为与可能继续旋转的传统电机相比,步进电机在电子设备故障时将保持静止状态。此外,与传统电动机相比,它们的操作相对接近其最大扭矩,传统电动机可具有比用于连续操作的扭矩高得多的失速扭矩。
ST Robotics提供多种步进驱动的机械臂,具有亚毫米级的可重复性[21]。但是,这些不是为人类安全而设计的。这些也是相对低成本的,例如R17臂(5-DOF,0.75m工作空间,2 kg有效载荷)的上市价格为10,950美元。20世纪80年代至90年代制造的其他几种小型不合规机器人也用于步进电机[22]。例如,Armdroid机器人手臂是5自由度并且有0.6米的距离; 它使用带有同步带的步进电机来减少齿轮,然后将电缆连接到臂的其余部分[23]。
第三章 总体设计
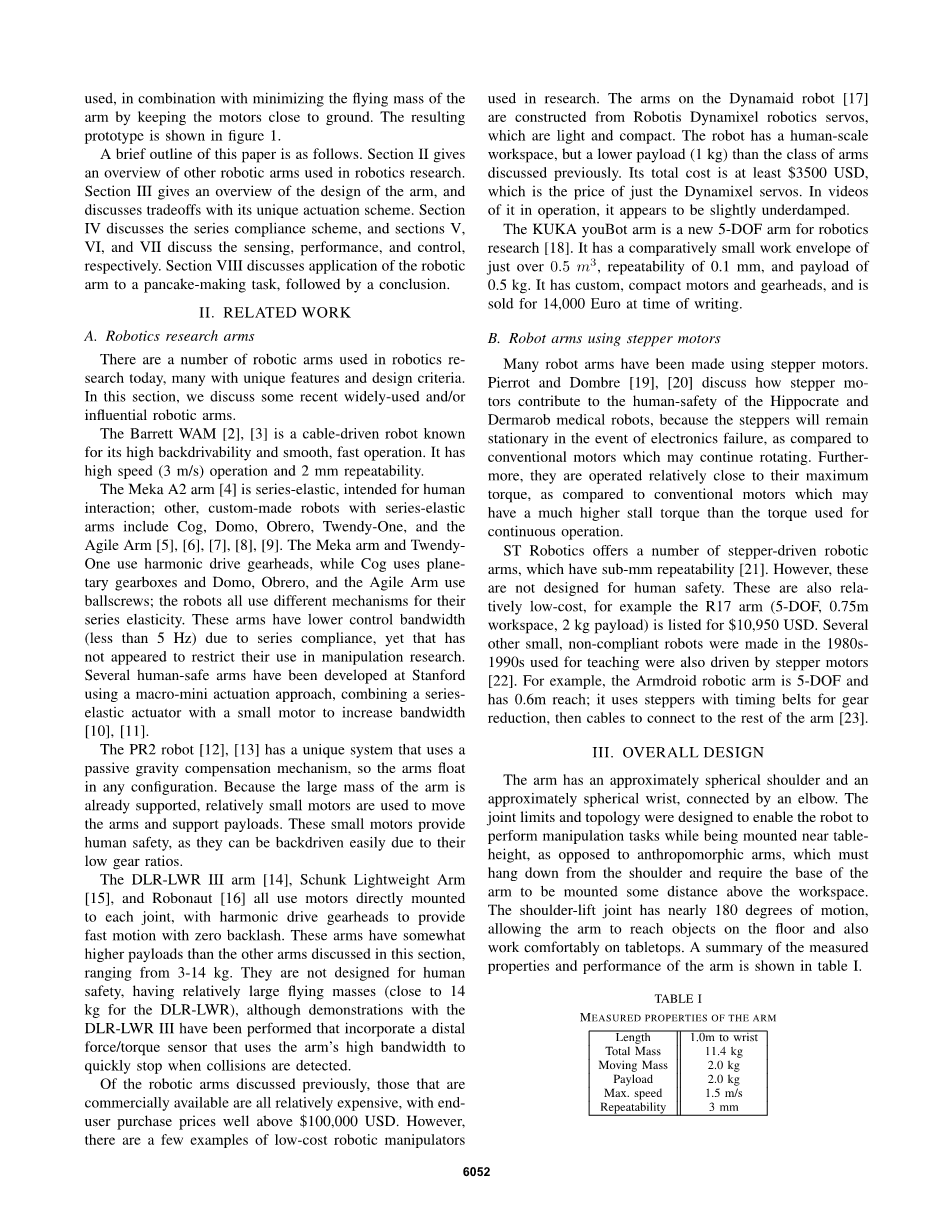
手臂有一个近似球形的肩膀和一个近似球形的手腕,通过肘部连接。关节限制和拓扑结构的设计使机器人能够在接近工作台高度时执行操作任务,而不是拟人手臂,拟人手臂必须从肩部垂下,并要求手臂的底部安装在工作台上方一定距离。举肩关节有近180度的运动,允许手臂接触地面上的物体,也可以在桌面上舒适地工作。表1是机械臂的测量特性和性能总结。
表I ARM的测量属性
图2 每个近端四自由度的驱动方案
A.驱动方案
图2显示了近端四自由度的驱动方案。这些接头由步进电机驱动,通过同步带和电缆电路实现减速,然后是串联弹性耦合。仅在传动系中使用正时皮带和电缆回路会导致低摩擦、最小粘性和零齿隙。这使得手臂能够进行小幅度的增量运动(小于0.5毫米),并且在施加外力的情况下没有齿轮装置受到损坏。与步进电机相结合,后者在低速时具有高扭矩,这导致了一个低成本但相对高性能的驱动方案。这个方案的一个缺点是减少机制占据了一个相对大的体积,使手臂的近端部分有点大。
采用两级减速的正时皮带,再加上电缆回路,不仅比单级减速大,而且可以使电机更靠近地面。两个最接近自由度的电机接地,肘部和上臂辊接头的电机距离地面一个自由度。通过将相对较重的步进电机靠近地面,臂的飞行质量大大降低:在第二个(提升)关节下方,臂的重量为2.0千克。相比之下,典型的成人手臂约为3.4千克[24]。
两级减速方案导致接头1和2以及接头2、3和4的运动耦合。然而,这种耦合是完全线性的,在软件中可以很容易地估计为前馈项。正时皮带和电缆的路线如图3所示。在同步带和电缆电路之后,近端四自由度在电缆绞盘和输出链路之间具有串联弹性耦合,如第四节所述。这些耦合用于提供臂的固有顺应性,以及提供力感应(第五节)。
远端三自由度由Dynamixel机器人RX-64伺服驱动。除了限制扭矩之外,这些接头不具有顺应性。然而,近端四自由度的顺应性允许末端执行器在三维空间中在笛卡尔空间中移位,除了运动奇点,其中仅两个维度将是顺应的。
B.步进电机使用的权衡
使用步进电机作为执行器有许多优点。步进电机擅长在低速时提供大扭矩,这是手臂的目标状态。它们需要相对较低的齿轮减速,这可以通过正时皮带和电缆驱动来实现。在本文讨论的原型机械手中,前四个关节的有效减小量分别为6、10、13和13。相比之下,直流电机通常需要更大的齿轮减速器,齿轮减速器既容易受到齿隙的影响,价格也稍昂贵。
图3 用于肩部提升、肩部滚动和肘部关节的电缆路径(实心)和皮带路径(虚线)。所有的传送带路径都绕着肩部提升关节旋转。肘部的钢索在空心轴内绕着轴肩滚动轴旋转。最好观看彩色图片。
图4 紧凑型伺服系统用于驱动远端三个关节
步进电机也起到电磁离合器的作用,如果在输出端意外施加较大的力,可以提高安全性。如果施加的力导致步进电机超过其保持扭矩,步进电机将滑动并移动一段距离,直到力足够低,步进电机可以重新接合。步进电机的保持扭矩大约比最大移动扭矩高出60%(因此臂的最大有效载荷),其大小足以避免不必要的滑动,但其大小足以确保臂的人身安全。
然而,作为电磁离合器的步进电机有一些缺点。首先,如果步进电机滑动,可能需要重新校准臂。ARM使用关节角度编码器进行状态估计,因此即使在滑动后仍可以进行闭环位置控制,但力感应将被错误校准(参见第五节)。第二,步进电机滑动后,臂可能突然移动。仅当施加较大的力时,臂才会滑动,滑动后,步进器最初提供的阻力很小。移动的手臂可能会与其他物体或人碰撞;这可以通过使手臂尽可能轻来减轻。在步进电机上增加后置轴编码器,即使在转子滑动时也能跟踪电机位置,并能更快地停止滑动电机。附加成本是否合理取决于任务和意外高速碰撞的预期频率。正如预期的那样,步进器滑动仅作为最后一层安全性发生,因此预计不会是一种频繁的操作模式。
C.混合SEA /非SEA致动方案
该机械手的驱动方案采用近4自由度的串联弹性执行机构(SEA),远端3自由度采用非串联弹性执行机构。远端3自由度的带宽略高于近端4自由度的带宽,允许一组受限的高频运动。这与[25]中描述的情况类似,后者对最近的自由度采 用宏-微驱动方案,对较远的自由度采用常规执行器。
在我们的方案中,较低的三自由度仍然获得了系列弹性上臂的大部分优点,包括通过调节位置来控制力的能力。与全系列弹性方案相比,这一方案的主要缺点是,远端自由度中的齿轮受冲击载荷的影响更大,因为(在最坏的情况下)整个臂的质量超过了系列柔度。
D.臂惯性和系列弹性刚度
与串联弹性机器人臂相比,需要重点权衡的地方是臂的惯性和串联弹性刚度。考虑一个单自由度手臂,其转动惯量I[]由带扭转刚度[Nm/弧度]的旋转接头驱动。臂将以其固有频率振荡,即。如果臂的惯性较低或串联弹性耦合较硬,则驱动臂的电机可能没有足够的扭矩或带宽来补偿这种振荡。Pratt和Williamson建议增加臂的惯性以消除这种影响[26];其他的选择是降低弹簧常数;包括串联弹性联轴器的阻尼;或者通过降低电机齿轮减速来增加带宽,但以降低有效载荷为代价。对于低惯量的人身安全机械臂来说,这一问题具有重要意义。
在我们的手臂中,考虑到肘关节,固有频率约为,=86Nm/弧度,I=0.083kg。这接近于我们目前的齿轮减速电机的带宽。
我们采用了几种方法来实现低成本设计,所有步进电机的总成本为700美元。另一种具有可比转速/扭矩性能的选择是使用具有行星齿轮减速功能的直流刷电机。尽管它们的价格相当,但它们的廉价齿轮头有出超过1度的齿隙。高性能的齿轮头或无刷电机将增加至少两倍的成本。例如,一个零间隙谐波驱动执行机构的成本超过1000美元,一个足够扭矩和0.75度间隙的无刷行星齿轮电机的成本为500美元。
表II 机械臂的成本明细
在目前的原型中,大部分结构采用了激光切割5层胶合板。使用的激光切割机(光束动力学全光灯500,500瓦)可以产生0.025mm的公差,并且使用Epilog Legend Helix 24(45瓦)激光切割机也获得了良好的效果。完成了木件的燕尾榫接,使它们能够压接在一起,法兰轴承和轴也压接在孔中。木材结构对大的温度和湿度变化的反应尚不清楚,但在典型的
全文共10902字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[190],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

