英语原文共 9 页
CAN-FD 总线性能分析与实验研究
里卡多 · 德安德拉德(RICARDO DE ANDRADE)1 ,克莱伯 · 恩 · 霍德尔(KLEBER n. HODEL)1 ,乔 · 奥 · 弗朗西斯科 · 尤斯托(jo o FRANCISCO JUSTO)1 ,阿曼多 · 拉根(ARMANDO m. lagan)1 ,马克斯 · 毛罗 · 桑托斯(MAX MAURO SANTOS)2,(IEEE 高级会员),及顾宗华(ZONGHUA GU)3
1.Escola polit cnica,圣保罗大学,CP 61548,CEP 05424-97,巴西圣保罗
2.巴西巴兰联邦技术大学电力公司,蓬塔格罗萨,巴拉那
3.美国哥伦比亚大学密苏里大学实验室 EECS 系,MO 65211
通讯作者: 顾宗华(guzo@missouri.edu)
这项工作部分得到了美国商务部批准 BS123456的支持,部分得到了国家自然科学基金批准61672454的支持。
摘要:控制器局域网路协议(CAN)是一种广泛应用于汽车分布式嵌入式系统的总线协议,但其有限的通信带宽(高达1mbps)和有效载荷(高达8字节)限制了其在当今日益复杂的汽车电子电气系统中的适用性。具有灵活数据速率的CAN(CAN-FD)是一种改进的基于CAN的通信协议,具有更高的通信带宽(有效负载高达8mbps)和增加的有效负载大小(高达64字节)。本文对CAN-FD总线和常规CAN总线的性能进行了分析和实验比较。我们考虑通过逆向工程获得一个真实的基于CAN的系统的消息集合,在不同的总线负载下通过附加高优先级的干扰消息对系统进行压力测试。同时考虑了基于消息集的网络控制系统,分析了不同总线负载下阶跃响应测量的控制系统性能。实验结果验证了CAN-FD相对于传统CAN总线的性能优势。
索引术语:汽车网络,CAN总线,CAN总线,车载通信系统。
I、引言
即将到来的汽车功能,如先进的驱动辅助系统,将需要可靠性属性,如安全性、安全性、可靠性和可用性[1]。车内通信是支持分布式汽车体系结构的关键组件,提供了控制、监视和诊断应用程序的基础设施。故障通过破坏传输消息的内容,对其产生错误,以至于为了从这些情况中恢复,现场总线网络实现了几种容错机制。但是,由于消息的传递延迟,这会导致通信过载,从而影响控制系统的性能。当消息具有实时性要求时,这是控制系统中常见的问题,这些问题会严重干扰系统的运行,导致系统的故障。这些汽车控制系统的正常运行是势在必行的,这迫使我们对它们的弱点进行评估[2]。
CAN 总线是大多数汽车上使用的多主消息广播系统,最大信号速率为1mbps。与传统的网络(如USB和以太网)相比,CAN不需要在中央总线主机的监督下点对点地发送大型数据块。在CAN网络中,许多短消息被广播到整个网络,从而提供了系统每个节点的数据一致性[3]。
最近对汽车网络带宽要求的增加已经使 CAN 达到了极限。为了满足这些要求,最近开发的CAN-FD允许更高的费率和有效载荷。这个新协议的控制器也执行标准的CAN通信,为未来的汽车系统提供了一个新的选择[4]。导致这种新协议的动机包括:(i)满足通信带宽需求的增加;(ii)提供一种协议,以最大带宽1mbps 填补低速和廉价CAN总线与高速但昂贵的FlexRay 间的差距,最大带宽为10-20mbps;(iii)避免从CAN迁移到FlexRay或以太网所涉及的昂贵的移植工作。
现实和未来的系统,如汽车和工业领域包含复杂的功能,需要基于CAN的高层协议与高数据通CAN(控制器局域网路)技术提供了高1mbps的带宽和有效载荷高达8字节,实际上是超载,不能满足需求的下一代汽车电子系统。尽管提出了一些替代方案,但是许多努力都集中在CAN的增强上,CAN的诞生是CAN-FD(具有灵活数据速率的控制器局域网路控制器)。然后,CAN-FD是一种改进的通信技术,带宽高达8mbps,有效载荷高达64字节[4]。
此外,本文还着重介绍了CAN-FD允许通过广泛的驱动保持原有特性的流量控制、消息传输、节点寻址、网关联网和网络管理等高层协议所必须实现的其他功能。然后,CAN-FD的更新不仅仅局限于增加带宽和有效载荷。
对CAN-FD总线进行了研究,分析了在有错误和没有错误的情况下,需要满足最后期限的消息的响应时间。提出了一种新的网络可靠性评估模型,该模型能够在外部源引起的暂态故障存在的情况下,评估网络相对于截止期故障的可靠性。此外,还确定了故障对网络实时性的影响[5]。
本文的其余部分组织如下。在第二部分,我们描述了CAN-FD的主要特点和性能,如规格,帧格式,带宽和有效载荷和控制器结构。在第三部分,我们描述了CAN-FD的时序分析和母线负载的解析模型。在第四部分,我们评估了应用CAN-FD在汽车分布式体系结构的控制级应用中的响应时序和总线负载改进。该方法可推广应用于诊断和终端目标检测。在第五部分,我们使用一个网络控制系统的电机控制的工业案例研究,以说明总线负载如何影响控制系统性能的CAN和CAN-FD总线。最后,在第六节中讨论了结论和未来的工作。
II、具有灵活数据速率的控制器局域网路
CAN-FD协议[5],[6],满足了这些要求,扩展了帧中有用的数据长度或有效负载从8字节到64字节,以及更高的数据传输速率,速度可达8mbps。 图1展示了CAN规范自1991年首次发布以来的演变。这种新总线价格低廉,并保留了原CAN的良好性能和健壮性。
CAN-FD规范最近已经提交[7],[8],并且相应的协议已经作为ISO 11898-2 2016提交国际标准化。它提出了新的功能,使更高的速度比传统的 CAN。
图1 从 CAN 规范 V2.0到 CAN-FD 规范 V1.0
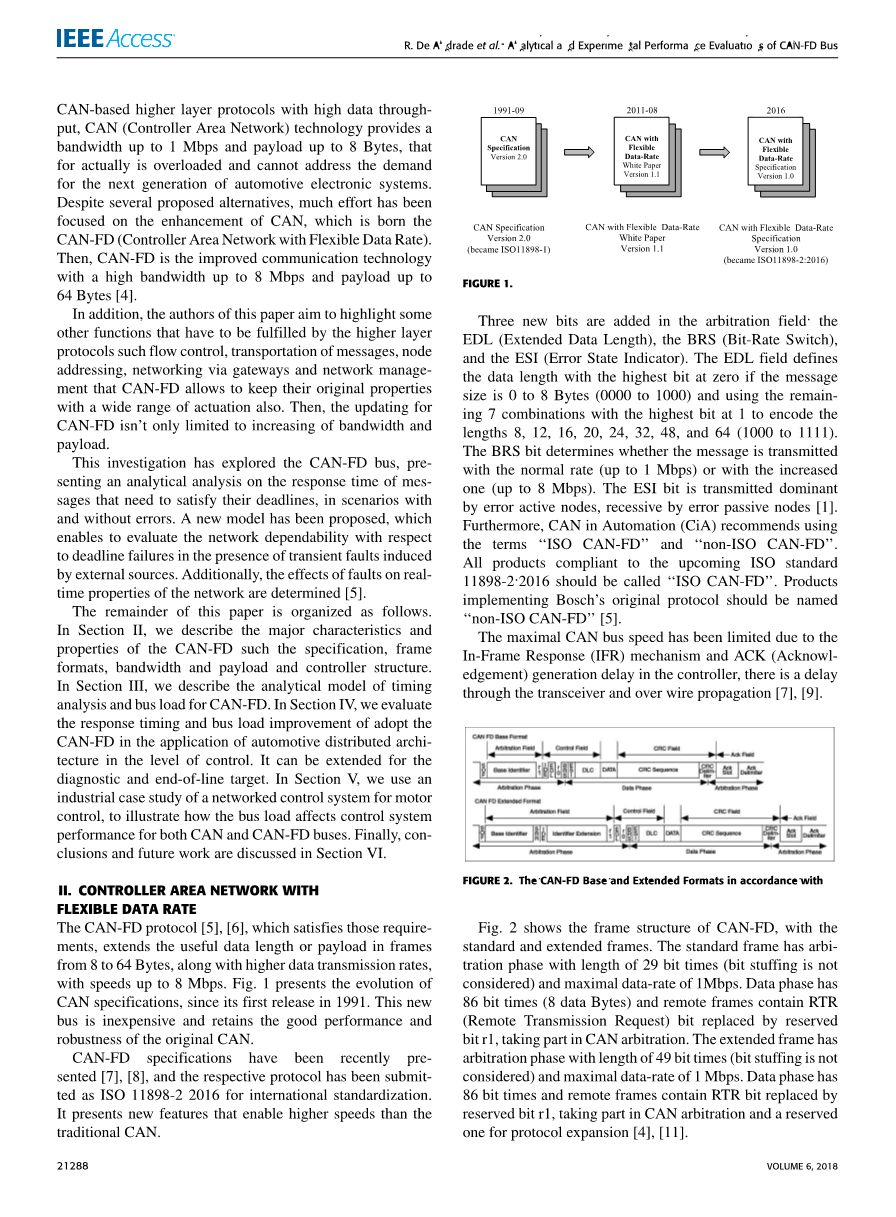
仲裁字段中添加了三个新位: EDL(扩展数据长度)、BRS(位速率开关)和ESI(错误状态指示器)。如果消息大小为0到8个字节(0000到1000),则EDL字段定义数据长度的最高位为零,并使用其余7个最高位为1的组合对长度8、12、16、20、24、32、48和64(1000到1111)进行编码。BRS位决定了消息是以正常速率(高达1mbps)传输还是以增加的速率(高达8mbps)传输。ESI位通过错误主动节点传输显性位,错误被动节点传输隐性位[1]。 此外,CAN in Automation (CiA)建议使用'ISO CAN-FD'和'non-ISO CAN-FD'两个术语。所有符合即将推出的ISO标准11898-2:2016的产品应称为'ISO CAN-FD'。实现博世原始协议的产品应命名为'non-ISO CAN-FD'[5]。
由于帧内响应(In-Frame ResponseIFR)机制和控制器的 ACK (Acknowledging) 生成延迟限制了CAN总线的最大速度,通过收发器和线上传输存在延迟[7],[9]。
图2显示了CAN-FD的帧结构,包括标准帧和扩展帧。标准帧具有长度为29位的仲裁阶段(不考虑位填充) ,最大数据速率为1mbps。数据相位有86位的时间(8个数据字节) ,远程帧包含RTR (Remote Transmission Request)位替换为保留位r1,参与CAN仲裁。该扩展帧具有长度为49位的仲裁阶段(不考虑位填充) ,最大数据速率为1mbps。数据相位有86位时间,远程帧包含RTR位,用保留位r1代替,参与CAN仲裁,保留一个用于协议扩展[4],[11]。
图2 根据 iso11898-1:2016制定的 CAN-FD 基准及扩展格式
EDL - 扩展数据长度
标准帧中的第一个保留位
EDL = 隐性表示 CAN-FD 帧格式(新的DLC-coding和CRC)
EDL = 优势表示标准 CAN 帧格式
r1,r0 - 保留位
传输占主导地位,为将来的协议变种保留
BRS - 位速率开关
BRS = 隐性: 切换到交替位速率
BRS = 主导: 不切换比特率
ESI - 错误状态指示器
BSI = 隐性: 传输节点是错误被动的
BSI = 主导: 传输节点处于错误激活状态
图3 通过从低速率切换到高速率,缩短了数据场相位
与传统的CAN一样,消息ID对消息优先级进行编码(较低的ID意味着较高的优先级)。消息ID的传输形成了仲裁阶段,传统CAN总线的带宽(高达1mbps)。 CAN-FD消息的有效载荷可高达64字节,带宽增加(高达8mbps)。图3显示CAN-FD 具有较高的带宽,因此在数据阶段(假设为4mbps)的传输时间低于CAN总线(假设为1mbps)。然而,只有通过重新设计(全部或部分)消息集才能利用较大的有效负载。在CAN-FD帧中找到一个新的信号打包并不是一个小问题,事实上,它是一个可变大小的装箱问题的实例[2]。
汽车系统的分布式应用需要串行总线中的事件触发和时间触发通信,其中信号延迟是保持良好性能的必要条件。物理层使用同一 CAN收发器不变。协议控制器具有两套时序配置。BTL(Bit Timing Logic)和BRP(Baud Rate precaler)控制两个集合之间的位时序切换,BSP(Bit Stream Processor)控制帧(反)编码,定义仲裁和数据相位。CAN消息处理具有作为(反)序列化的移位寄存器,BSP不限制数据字段长度。图4展示了CAN-FD控制器的结构。
图4 CAN-FD 控制器的框图结构
在CAN协议控制器中,基于时间量基对比特时序逻辑(Bit Timing Logic,BTL)的状态机进行求值,使采样点的位置与被监控比特流中的边缘同步到一个特定的相位。CAN节点在公交线路上对接收到的边进行从隐性到显性的同步。 其采样点的相位相对于发射机采样点的相位而移动。节点特定的相移取决于从发射机到特定节点的信号延迟时间[11]。
节点之间的消息延迟时间取决于网络电缆长度和收发信机延迟,当多个节点发送一个比特时必须考虑这两个因素。CAN位时间的配置,特别是传播段长度应该编程来定义样本点位置不能设置的位置。一旦决定了消息的仲裁阶段,直到 CRC域结束,只有一个节点传输主要的比特,而所有其他节点同步到这个单一的发送器。因此,可以在CAN帧的这一部分切换到预定义的(更短的)位时间,这里标记为境监察及审核资料-阶段(Data-Phase)。
III、CAN-FD 的时序分析与母线负荷
汽车系统或工业自动化的分布式应用需要串行总线中的事件触发和时间触发通信,其中信号延迟是保持良好性能的必要条件。 此外,下一代汽车系统的应用也对通信总线提出了更高的带宽和有效载荷要求。
廷德尔公式[12]可以用来计算CAN消息的最坏情况传输时间(WCTT Worst-Case Transmission Time) :
我们采用类似的方法计算一个CAN-FD消息的WCTT,Cm:
其中是固定大小报文头的传输时间,传统CAN的传输带宽较低(高达1mbps) ,具有有效的位优先级仲裁; 是可变大小报文有效载荷的传输时间CAN-FD的传输带宽较高(高达8mbps)。CAN-FD协议定义了五种不同的错误检测机制: 其中两种在位级别工作,另外三种在消息级别工作。它们是:(i)位监视、(ii)位填充、(iii)帧检查、(iv)确认检查和(v)循环冗余校验。CRC有两个选项,对于17位的CRC长度,应该表示为 ; 对于21位的CRC长度,应该表示为。
其中SOF(开始帧) ID(标识符) r1(保留位1) IDE EDL(扩展数据长度) r0(保留位0) BRS/2(比特率开关) CRCdel/2(CRC分隔符) = 17位,1.2是最坏情况下位填充的因子,这意味着需要除以5。它被认为是BRS和CRCdel 除以2,因为它们正处于比特率转换的转移中。ACK(Acknowledge) DEL(Delimiter) EOF(Endof-Frame) IFS(Interframe Spacing) = 12位无位填充。CAN-FD有效载荷大小可能为0,8,12,16,20,24,32,36,48,64字节。 是消息头的传输带宽(高达1mbps)。 表1显示了CAN-FD消息中每个字段的含义和位宽度。
表1.CAN-FD 消息中的位字段及其长度
当数据长度小于16字节时,可变时间位的计算如下:
其中 位字段是5位从位填充 17位从CRC和gt;16字节的数据。是有效载荷的传输带宽(高达8mbps)。当数据长度大于16个字节时,可变时间位的计算如下:
其中位字段是6位来自位填充 21位来自CRC。必须是21字节,因为字段有较大的字节空间,所以有必要增加字段以提高检错的准确性。
得到了每条消息的WCTT,并给出了每条消息的周期,通过总结每条消息的总线负载可以得到系统总线负载:
本文假设CAN总线的传输带宽为0.5 Mbps,CAN-FD总线报头的传输带宽为 = 0.5 Mbps,CAN-FD消息有效负载的传输带宽为 = 4Mbps。
IV、 案例研究 I: 汽车分布式
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

