英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
基于行为的编队控制 多机器人队伍
IEEE成员Tucker Balch和IEEE高级成员Ronald C. Arkin
摘要—介绍并评估了在多机器人团队中实现编队的新反应行为。编队行为与其他导航行为相集成,以使机器人团队能够达到导航目标,避免危险并同时留在编队中。这些行为是通过仿真,实验室中的机器人以及DARPA基于HMMWV的无人地面飞行器上的机器人实现的。该技术已与自主机器人架构(AuRA)和UGV Demo II架构集成在一起。结果证明了各种类型的编队在自治, 人为主导和通信受限的应用中的价值,以及它们在不同类型的任务环境中的适用性。
索引词-自治机器人,基于行为的控制,机器人组成。
- 介绍
T
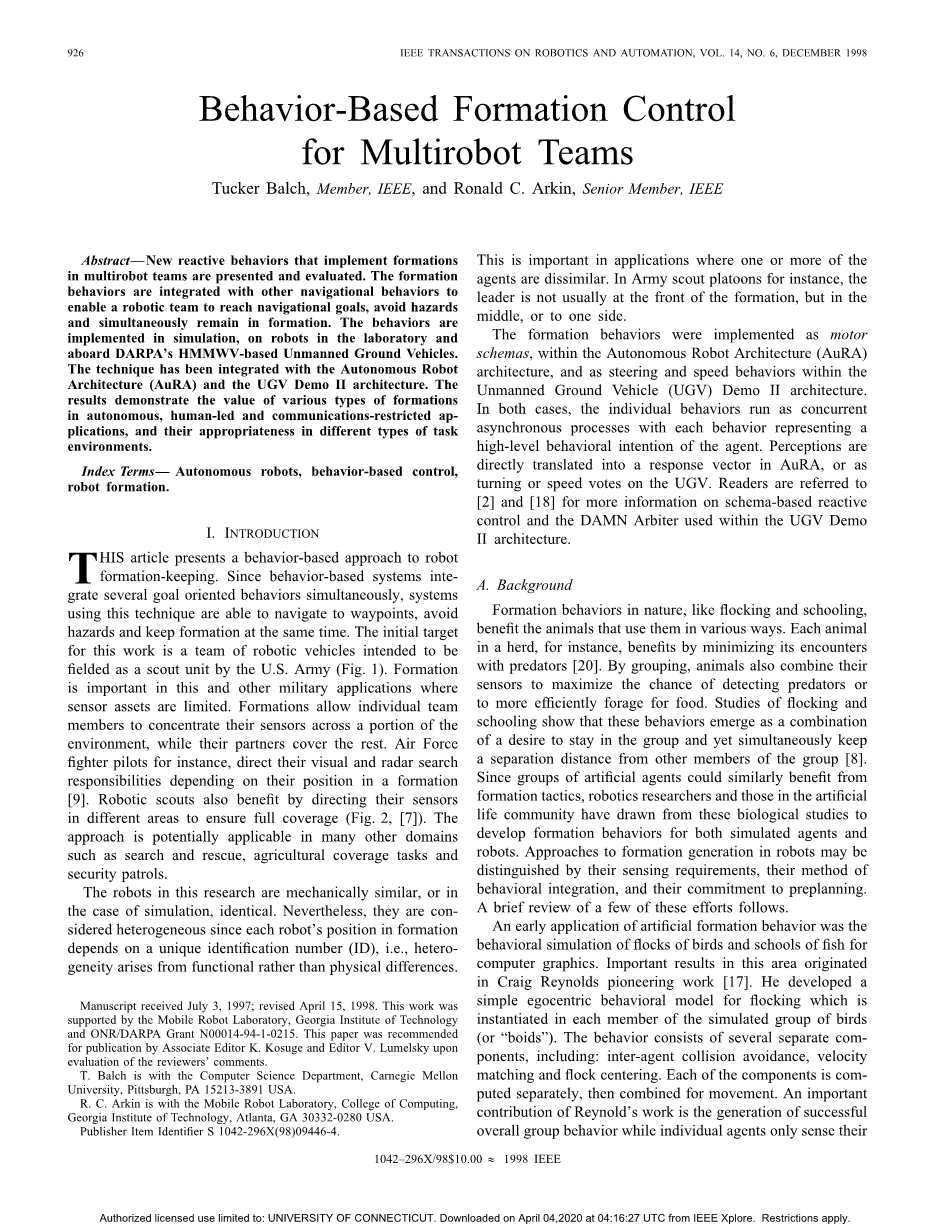
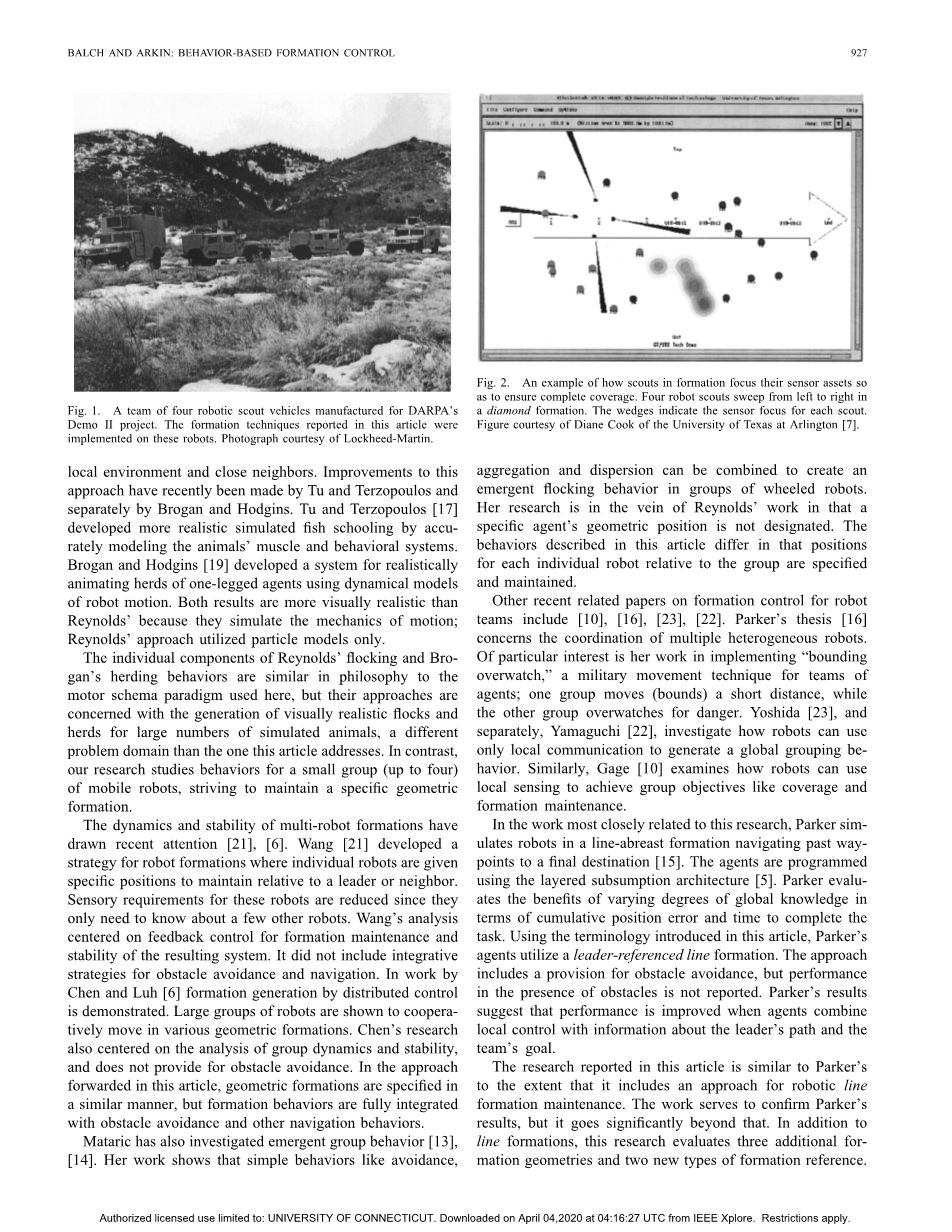
HIS文章提出了一种基于行为的机器人编队保持方法。 由于基于行为的系统同时集成了多个面向目标的行为,因此使用此技术的系统能够导航到航路点,避免危险并保持形成。这项工作的最初目标是准备由美国陆军作为侦察部队部署的机器人车辆团队(图1)。在传感器资产有限的 这种和其他军事应用中,编队很重要。编队允许单个团队成员将传感器集中在一部分环境中,而他们的伙伴则负责其余部分。例如,空军战斗机飞行员根据其在编队中的位置来指挥其视觉和雷达搜索职责[9]。机器人侦察兵也可以通过将其传感器指向不同区域来确保完全覆盖而受益(图2,[7])。该方法可能适用于许多其他领域,例如搜索和救援,农业覆盖任务和安全巡逻。
本研究中的机器人在机械上是相似的,或者在模拟情况下是相同的。但是,由于每个机器人的编队位置取决于唯一的标识号(ID),因此它们被认为是异质的,即异质性源于功能差异而不是物理差异。
手稿于1997年7月3日收到;修订于1998年4月15日。这项工作得到了佐治亚理工学院移动机器人实验室和ONR / DARPA Grant N00014-94-1- 0215的支持。在对审阅者的评论进行评估之后,副编辑K. Kosuge和编辑V. Lumelsky推荐发表该论文。
T. Balch在美国宾夕法尼亚州匹兹堡的卡内基梅隆大学计算机科学系任职,宾夕法尼亚州15213-3891。
RC Arkin在美国佐治亚州亚特兰大市佐治亚理工学院计算机学院移动机器人实验室工作,美国乔治亚州30332-0280。
发布者项目标识符S 1042-296X(98)09446-4。
这在一种或多种代理不相似的应用中很重要。例如,在陆军侦察兵排中,首长通常不在编队的前面,而是在中间或一侧。
在自主机器人架构(AuRA)架构内,编队行为被实现为电机模式,在无人地面车辆(UGV)Demo II架构内,编队行为被实现为转向和速度行为。在这两种情况下,单个行为都作为并发异步进程运行,每个行为代表代理的高级行为意图。感知将直接转换为AuRA中的响应向量,或者作为对UGV的投票或快速投票。参考读者
- 和[18]提供了有关在UGV Demo II体系结构中使用的基于模式的反应性控制和DAMN仲裁器的更多信息。
A.背景
大自然中的编队行为,例如植绒和上学,使以各种方式使用它们的动物受益。例如,畜群中的每只动物都可以通过减少与掠食者的接触而受益[20]。通过分组,动物还可以组合其传感器,以最大程度地检测掠食者或更有效地觅食。植绒和学校教育的研究表明,这些行为是留在小组中并同时与小组中其他成员保持距离的一种组合[8]。由于 各组人工代理可以类似地受益于编队战术,因此机器人研究人员和人工生命界的研究人员已从这些生物学研究中汲取了经验,以开发模拟代理和机器人的编队行为。机器人中的编队生成方法可能会因其传感要求,行为整合方法以及对预计划的承诺而有所区别。下面简要回顾其中的一些努力。
人工形成行为的早期应用是用于计算机图形学的鸟群和鱼群的行为模拟。该领域的重要成果源自Craig Reynolds 的开拓性工作[17]。他开发了一个简单的以自我为中心的植绒行为模型,该模型在模拟鸟群(或“鸟类”)的每个成员中实例化。该行为由几个单独的组件组成,包括:避免智能体间冲突,速度匹配和羊群居中。每个分量都分别计算,然后组合起来进行移动。雷诺(Reynold)工作的一个重要贡献是成功地产生了整体的群体行为,而每个个体只感觉到他们的行为
1042–296X/98$10.00 1998 IEEE
图1.由DARPA的Demo II项目制造的四支机器人侦察车团队。本文报道的编队技术是在这些机器人上实现的。图片由洛克希德·马丁公司提供。
当地环境和近邻。Tu和Terzopoulos最近对这种方法进行了改进, Brogan 和Hodgins 分别进行了改进。 Tu 和Terzopoulos [17]通过对动物的肌肉和行为系统进行精确建模,开发出了更加逼真的模拟鱼类养殖方法。Brogan和Hodgins [19]开发了一种系统,该系统可以使用机器人运动的动力学模型对单足动物群进行逼真的动画处理。这两个结果都比雷诺的视觉效果更逼真,因为它们模拟了运动机理。雷诺的方法仅使用粒子模型。
雷诺群羊和兄弟群羊群行为的各个组成部分在哲学上与此处使用的运动模式范式相似,但它们的方法与为大量模拟动物生成视觉逼真的羊群和畜群有关,而问题域不同于动物群。本文介绍的一种。相比之下,我们的研究针对一小群(最多四个)移动机器人的行为,努力保持特定的几何形状。
多机器人编队的动力学和稳定性最近引起了人们的关注
图2.侦察兵如何集中其传感器资产以确保完全覆盖的示例。四个机器人侦查员从左到右扫成菱形。楔形指示每个侦察器的传感器焦点。图由德克萨斯大学阿灵顿分校的黛安·库克(Diane Cook)提供[7]。
聚集和分散可以组合在一起以在轮式机器人组中创建紧急 植绒行为。她的研究与雷诺(Reynolds)的工作息息相关, 因为没有指定特定人员的几何位置。本文中描述的行为不 同之处在于,每个机器人相对于组的位置均已指定并保持。
其他有关机器人团队的编队控制的相关论文包括[10], [16],[23],[22]。Parker的论文[16]涉及多个异构机器 人的协调。她特别感兴趣的是实施“包围式守望”的工作, 这是一种针对特工团队的军事移动技术。一组移动(出界) 一小段距离,而另一组监视危险。吉田[23]和山口[22]分 别研究了机器人如何仅使用本地通信来生成全局分组行为。同样,Gage [10]研究了机器人如何利用局部感测来实现诸如覆盖和编队维护之类的小组目标。
在与这项研究最密切相关的工作中,Parker模拟了行并排编队中的机器人,这些机器人通过航路点导航到最终目的地[15]。使用分层的包含架构[5]对代理进行编程。派
-
- ,[6]。Wang [21]开发了一种针对机器人编队的策略, 克根据累计位置误差和完成任务所需的时间来评估不同程
在这种策略中,给单个机器人指定相对于领导者或邻居的位置。这些机器人的感官要求降低了,因为它们只需要了解其他几个机器人即可。Wang的分析集中在反馈控制上, 以保持地层维护和最终系统的稳定性。它没有包括避免和导航障碍的综合策略。在Chen和Luh [6]的工作中,证明了通过分布式控制来生成地层。大型机器人组以各种几何形式协同运动。Chen的研究还集中在群体动力学和稳定性的分析上,没有提供避障的方法。在本文提出的方法中, 以相似的方式指定了几何编队,但是编队行为与避障和其他导航行为完全集成在一起。
Mataric还研究了突发群体行为[13],[14]。她的工作表明,诸如回避,
度的全球知识所带来的好处。使用本文介绍的术语, Parker的代理商利用领导者参考的线阵。该方法包括避免障碍的规定,但是没有报告在存在障碍的情况下的表现。Parker的结果表明,当特工将本地控制与有关领导者的道路和团队目标的信息结合起来时,绩效将会得到改善。
本文报道的研究在某种程度上类似于Parker的研究,其中包括用于维护机器人生产线的方法。这项工作证实了派克的结果,但远远超出了此范围。除线地层外,本研究还评估了三种其他地层几何形状和两种新型地层参考。
(a) (b) (c) (d)
图3.四个机器人的结构:(a)线,(b)柱,(c)金刚石和(d)楔形。每个机器人在其编队中都有特定的维护位置,如其识别号(ID)所示。
-
-
- (b) (c)
-
图4.通过各种参考技术确定的编队位置(从左到右:单位中心,领导者,邻居)。
定量评估表明,一种新的参考技术(单元中心)比Parker 的工作中采用的领导者参考方法具有更好的性能。维护地
在模式控制中,该命令是朝向所需位置的运动矢量。对于UGV Demo II体系结构,将单独投票以对编队位置进行转
层的行为方法也不同。在Parker调查中使用的包含架构中, 向和速度校正。每种架构的电机命令将在下面详细介绍。
行为是竞争性选择的;药剂必须要么避免危险,要么进入地层,但不能两者兼而有之。此处使用的运动模式方法使用于移动到目的地,避开障碍物的行为以及保持编队同时活动并协同结合。此外,除了在仿真中运行外,我们的方法还在两种不同类型的移动机器人平台上得到了验证。
- 方法
考虑了由四个机器人组成的团队的几种形式(图3):
线 机器人并排行驶;柱
机器人一个接一个地移动;钻石机器人在钻石中行走;楔 机器人以“ V”行进。
这些编队被战场上的美国陆军机械化侦察兵排所使用[3]。对于每个编队,每个机器人都有一个基于其标识号
(ID)的特定位置。图3显示了编队和机器人在其中的位 置。四个机器人中每个机器人的主动行为都相同,除了机器人1以领导者参考的形式(参见下文)。每个机器人的 任务是同时移动到目标位置,避开障碍物,避免与其他机器人碰撞并保持编队位置,通常是在更高级别的任务场景中。
编队维护分两个步骤完成:首先,进行感知过程,检测编队位置,根据当前环境数据确定机器人在编队中的正确位置;第二,电机过程维护信息,生成电机命令以将机器人引导至正确的位置。对于AuRA的电机
每个机器人根据其他机器人的位置计算其在地层中的适当位置。已经确定了三种用于确定地层位置的技术。
- 单位中心参考:单位中心由每个机器人通过平均编 队中所有机器人的位置和位置来独立计算。每个机器人都确定自己相对于该中心的编队位置。
- 领导参考:每个机器人都确定其相对于领先机器人
(机器人1)的编队位置。领导者不试图维持阵型。其他 机器人负责编队维护。
- 邻居参考:每个机器人都相对于另一个预定的机器 人保持位置。
地层的方向由从单位中心到下一个导航航路点的线定义。单位中心和地层方位共同定义了描述地层位置的局部坐标 系。在每个移动步骤都会重新计算该局部坐标系。形成关 系如图4所示。箭头显示了如何确定形成位置。每个箭头 都从机器人指向关联的参考。感知模式检测形成位置使用 这些引用之一来确定机器人的位置。机器人之间的间距由 检测形成位置的所需间距参数确定。
每个机器人通过直接感知其他机器人,传输从全球定位系统(GPS)获得的世界坐标或通过航位推算来确定其对 等体的位置。当需要机器人之间的通信时,机器人会根据给定的编队速度和环境条件,以最快的速度在世界坐标中传输其当前位置。位置信息传输中的位置误差和等待时间会
对性能产生负面影响。在模拟运行中,没有位置错误或通信延迟。在实验实验室运行中,Nomad 150的位置误差小于10厘米。通信等待时间约为一秒钟。由于使用DGPS,当前UGV实施的位置误差小于1米;通讯等待时间有时长达7 秒。
本文的其余部分描述了在仿真中以及在两种类型的移动机器人上这些形成行为的实现。下一部分将介绍电机模式的实现。它包括对基于电动机模式的系统的性能分析,该系统依次进行并且跨越障碍物区域。该行为已在Nomadic Technologies Nomad 150机器人上进行了演示。移动机器人和仿真运行之间的比较支持仿真实验中收集的数据的重要性。
第四节介绍了该方法在UGV Demo II体系结构上的实现。UGV平台需要将电动机控制解耦为独立的转向和速度行为。 尽管存在这种差异,但UGV实施仍采用与电机模式方法相 同的感知机制来确定机器人的编队位置。两种实现方式都 会根据其偏离位置的程度,以可变的强度将机器人“推回” 到位。在这两个截然不同的平台上实施相同方法说明了其 可移植性和有效性。
- 基于电机原理图的结构控制几种电机原理图,目标运行,静态避免,
障碍物,回避机器人和维护编队实现了机器人移动到目标
位置的总体行为,同时避免了障碍物,与其他机器人的碰
撞以及在编队中的停留。另一个背景模式,噪声,是一种反应性“油脂”的形式,用于处理纯反应性导航方法特有的一些问题,例如局部最大值,最小值和循环行为[1]。在给定环境所提供的当前感官刺激的情况下,每个方案都会生成一个向量,该向量表示所需的行为响应(运动的方向和大小)。增益值用于指示各个行为的相对重要性。通过将每个原始行为的输出乘以其增益,然后对结果求和并归一化,可以生成高级组合行为。表I列出了本文中用于 实验仿真的增益和其他模式参数。附录包含有关此研究中使用的各个模式的特定计算的信息。有关基于电机模式的导航的计算基础的完整讨论,请参见[
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[425150],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

