英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于四线激光雷达的车辆障碍物检测研究
段建明,李晓石,姚俊琴,刘丹,齐天
摘要—为了完成车辆在结构性道路上的自主驾驶任务,有必要检测障碍物。本文提出了一种利用四线激光雷达进行障碍物检测的方法。该算法将改进后的DBSCAN与K-Means相结合,克服了DBSCAN无法对具有相似密度的障碍物进行划分的缺陷。同时,该方法可以有效地消除噪声点。基于聚类,可以获取障碍物的信息,如角度,距离和大小,从而完成障碍物检测任务。该算法适用于智能车辆的障碍物检测。实验证明其一贯可靠,符合智能车辆自动驾驶的要求。
关键词—DBSCAN,智能车,K-means,激光雷达,障碍物检测
1. 引言
智能车辆实现自动驾驶的首要条件是能够感知外部环境,然后将车辆周围的障碍物信息传递给控制和决策系统,从而控制车辆自动驾驶。障碍物作为阻碍车辆正常行驶的特殊外部环境,其识别是环境感知系统首先要解决的问题。激光雷达具有感知误差小,鲁棒性强等特点,是环境感知系统中的重要传感器,被广泛应用于车辆辅助驾驶[1],ALV等领域。本文重点研究碍物检测方法。
2.LUX-4简介和配置
-
- LUX-4简介
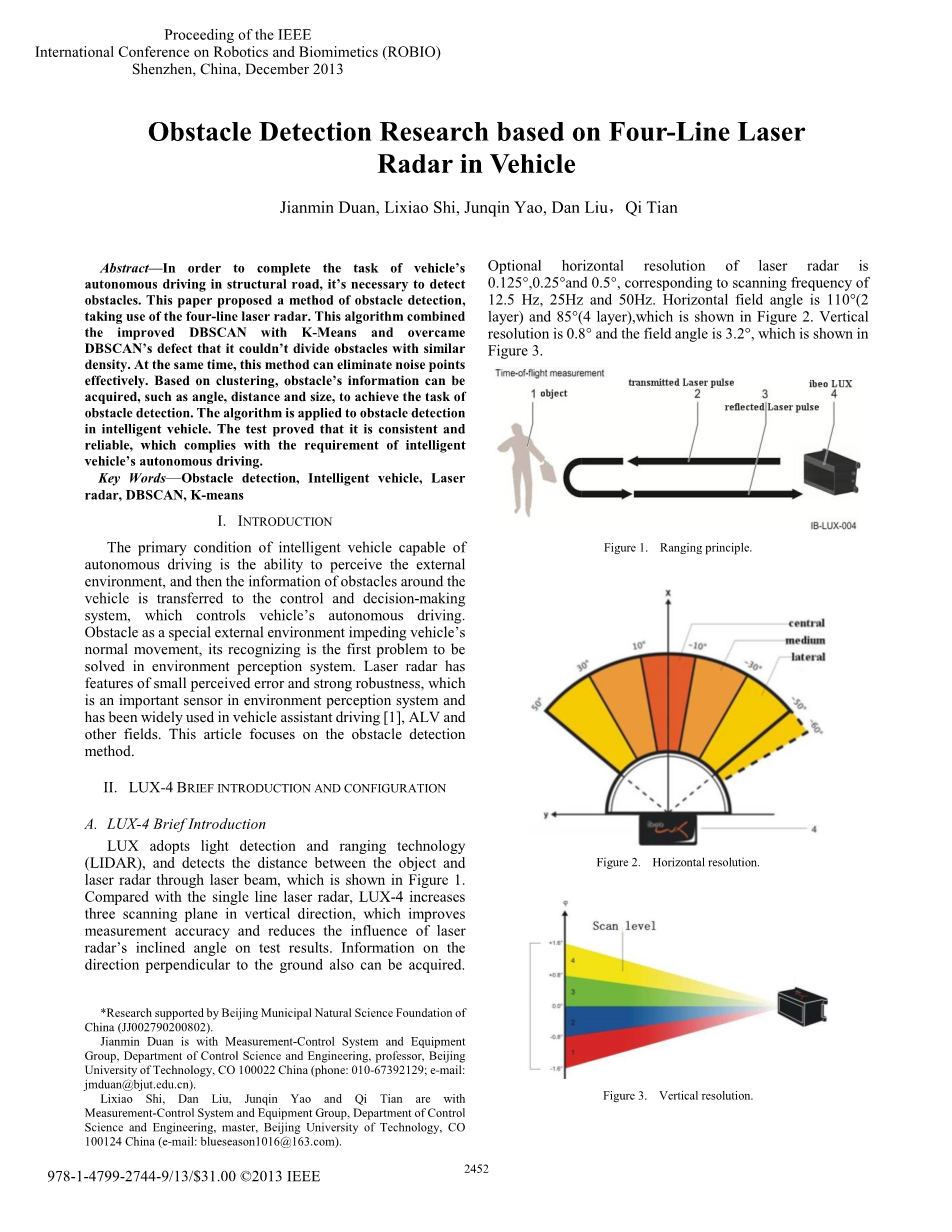
LUX采用光探测和测距技术(LIDAR),通过激光束探测物体与激光雷达之间的距离,如图1所示。与单线激光雷达相比,LUX-4在垂直方向上增加了三个扫描平面,提高了测量精度,减少了激光雷达倾角对测试结果的影响。垂直于地面方向的信息也可以被获取。
激光雷达的可选水平分辨率为0。125°,0。25°和0。5°,对应于12。5Hz,25Hz和50Hz的扫描频率。水平视场角为110°(2层)和85°(4层),如图2所示。垂直分辨率为0。8°,视场角为3。2°,如图3所示。
图1测距原理
图2水平分辨率。
*北京市自然科学基金资助项目(JJ002790200802)。
段建民,北京科技大学控制科学与工程学院测控系统及设备研究组,教授, CO 100022 中国 (电话: 010-67392129;邮箱:jmduan@bjut。edu。cn)。
李晓石, 姚俊琴,刘丹, 齐天 北京科技大学控制科学与工程学院测控系统及设备研究组,硕士, CO 100124 中国, (邮箱: blueseason1016@163。com)。
图3垂直分辨率
2.2 传感器配置 24B。 传感器配置
系统设计目标是车辆可以以25公里/小时的最高速度行驶。当车辆在正常情况下自动行驶时车辆的最大减速度是3。429m/s2,最大制动距离7。032米。如果车辆遇到障碍物,考虑到程序的运行时间和控制系统的反应时间,需要20m的距离。因此,激光雷达能够在20米处探测到障碍物。
四个扫描平面的相邻平面之间的固定角度为0。8°。在相同的扫描平面上,扫描频率设置后,相邻扫描点之间的角度自动设置。因此,垂直视野主要取决于安装高度和倾斜角度。激光雷达安装得越高,可以检测到更远的障碍物。但随着安装高度的增加,检测小障碍物的能力将会减弱。总结以前的考虑因素,请参阅用户手册,并结合车辆的实际空间限制,安装高度H是82cm。
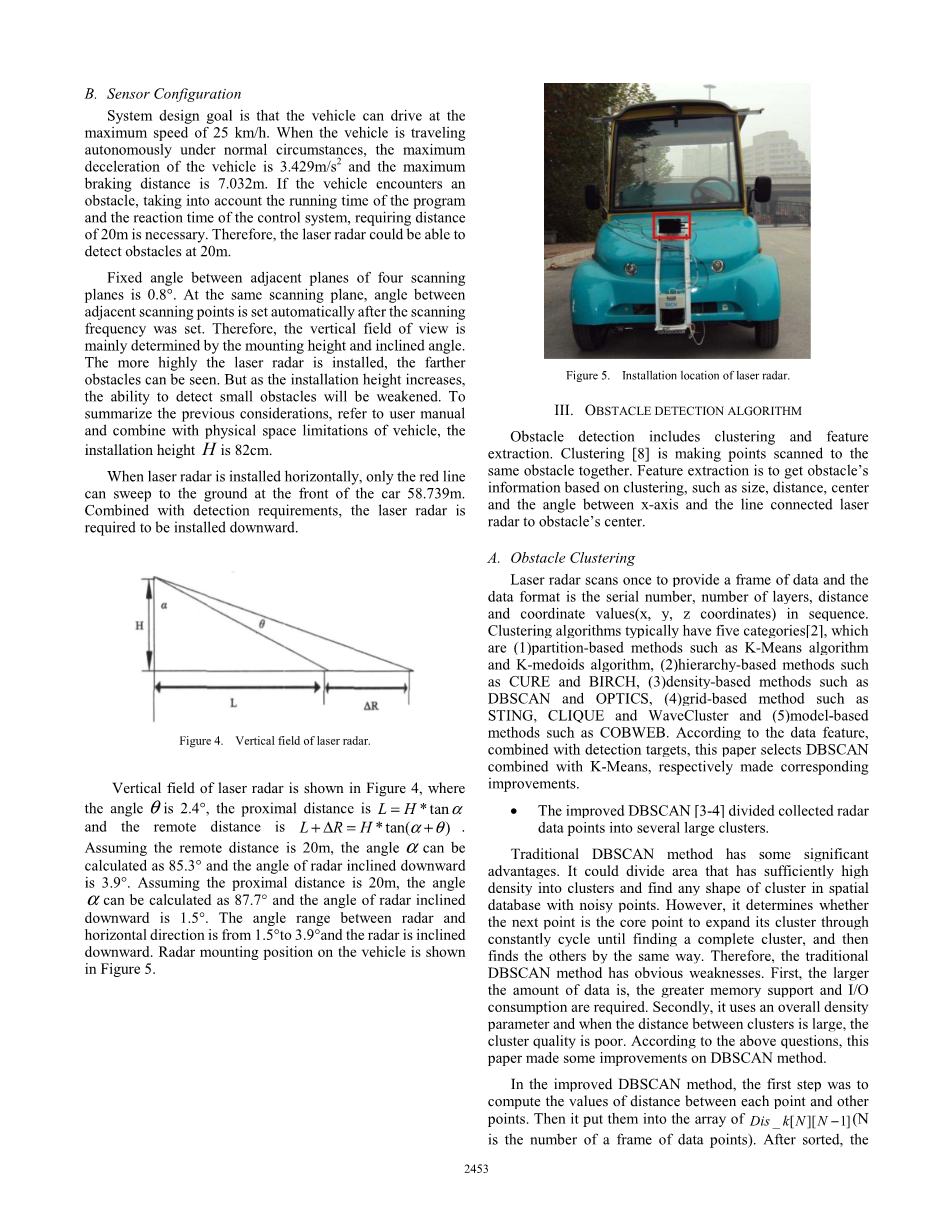
当激光雷达水平安装时,只有红线可以扫到车前58。739米的地面。结合检测要求,激光雷达需要斜向下安装。
图4激光雷达的垂直场
激光雷达的垂直视野如图4所示,其中角度theta;是2。4°,近端距离是L = H * tanalpha; 和远程距离是L ∆R = H * tan(alpha; theta;)。假设远程距离是20米,角度alpha;可以计算为85。3°,雷达倾斜角度为3。9°。假设近端距离为20米,角度alpha;可以计算为87。7°,雷达向下倾斜角度为1。5°。雷达与水平方向之间的角度范围为1。5°至3。9°,雷达向下倾斜。图5显示了车辆上的雷达安装位置。
图5激光雷达的安装位置
3.障碍物检测算法
障碍物检测包括聚类和特征提取。聚类[8]使点一起扫描相同的障碍。特征提取是基于聚类得到障碍物的信息,如大小,距离,中心以及x轴与连接激光雷达到障碍物中心的线段的角度。
3.1 障碍聚类
激光雷达扫描一次以提供一帧数据,数据格式是序列号,层号,距离和坐标值(x,y,z坐标)。聚类算法通常有五类[2],它们是:(1)基于分区的方法,如K-Means算法和K-medoids算法;(2)基于层次的方法,如CURE和BIRCH;(3)基于密度诸如DBSCAN和OPTICS的方法;(4)基于网格的方法,如STING,CLIQUE和WaveCluster和(5)基于模型的方法,如COBWEB。根据数据特征,结合检测目标,选取与K-Means相结合的DBSCAN,分别做出相应的改进。
3.2改进的DBSCAN [3-4]将收集到的雷达数据点分成几个大的群集
传统的DBSCAN方法具有一些显着的优点。它可以将具有足够高密度的区域划分为簇,并在有噪点的空间数据库中找到任何形状的簇。然而,它决定了下一个点是否是通过不断循环来扩展其集群的核心点,直到找到一个完整的集群,然后以相同的方式找到其他集群。因此,传统的DBSCAN方法存在明显的缺陷。首先,数据量越大,需要更大的内存支持和I / O消耗。其次,它使用整体传统的DBSCAN方法具有一些重要的优点。它可以将具有足够高密度的区域划分为群集,并在有噪点的空间数据库中找到任何形状的群集。然而,它决定了下一个点是否是通过不断循环来扩展其集群直到找到一个完整的集群的核心点,然后以相同的方式找到其他的。因此,传统的DBSCAN方法存在明显的缺陷。首先,数据量密度参数,并且当簇之间的距离大时,簇质量差。针对上述问题,本文对DBSCAN方法做了一些改进。
在改进的DBSCAN方法中,第一步是计算每个点与其他点之间的距离值。然后把它们放入数组Dis_k[N][Nminus;1]中(N是一帧数据点的数字)。排序后,第八个(根据实际情况)点的距离值和序号存储在数组Order_P[N] 中并重新排序。如果相邻点的差值超过一个固定的阈值,则这两点是将一个簇分成不同簇的关键点。图6是改进的DBSCAN的示意图。
图7第八个最近点的两个相邻点之间的差异分布
图6改进的DBSCAN的示意图
对于收集的实际数据,相邻点之间的差异分布如图7所示。水平方向表示N-1个间隔。垂直方向代表相邻点之间的差异,单位为厘米。第一部分中分散的点可以看作是噪声点,不再进行任何处理。第二部分的点相对疏松,没有任何规律。显然,他们不是扫描到障碍物的点。由于扫描到障碍物的相邻点之间的间隔非常小,有些点基本重叠,这些点具有高度聚集性,因此密度最高的点可以视为扫描障碍物的点。所以,只有第三部分的点才会做进一步的处理。
改进的DBSCAN方法减少了计算量,提高了计算速度,有效地消除了噪声点的影响。它可以将较大密度间隙的障碍物分开,但不能将具有相似密度障碍物区分并通过一定的距离进行区分。第三部分的点可能不会被扫描到相同的障碍物。
如果只采用改进的DBSCAN将原始数据划分为若干个簇,则只适用于只有一个障碍物的情况。假设
全文共6674字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16550],资料为PDF文档或Word文档,PDF文档可免费转换为Word

