
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
通过寻路和路线描述实验的地下停车空间地图设计
介绍
城市的快速发展导致了大量的人口涌入,因此道路系统正变得越来越复杂。为了高效率地利用有限的空间,人们在垂直方向上规划和开发城市空间。室内空间的功能和形式也更加多样化。随着高层建筑的出现,停车空间的需求也在增加。然而,因为城市的土地稀缺,停车场通常建在地下。这些孤立的地下停车场会对司机产生负面影响。不同于露天停车场,地下停车场缺乏景观或地标,这会导致司机在自我定位和寻路上的困难。
许多寻路研究对室内空间进行了分析,比如高层建筑(hlscher,2009;Hund和Padgitt,2010),展览厅(Rujibhong,2012),或医院(Samah,2012)。一些目标户外空间(Zheng,2012),以确定最佳的标识系统和给定环境的空间布局,并进行改进。最近,也有一些关于个体认知认知差异的研究(Hund和Nazarczuk,2009;Bishop, 2012)。在这些研究中,大多数研究人员记录下受试者的行为,调查他们,统计他们花费的时间、行走的距离、速度和距离的百分比,作为寻路的研究依据。然而,在地下停车场的寻路问题上还没有得到彻底的研究。
本研究调查台北市最大的停车场,富钱停车场。根据台北市政府的说法,许多停车者抱怨他们很难找到停车位。本研究与台北市政府合作,以那些从来没有去过富钱停车场的人为研究对象,调查了地下停车场的寻路问题,目的是确定寻路期间使用的策略,改善地下车库的地图,并对未来地下停车场环境和标识系统的安装提出了一个模型。
实验方法
此研究进行了两个实验。在第一个实验中,实验对象被要求根据现有的地图在停车空间中进行一个寻路任务,并根据任务中确定的问题,提出了一种新的地图设计方案。第二个实验包括路线规划,路线描述,寻路,以及使用新地图,以确定它的有效性。接下来该研究进一步分析了从这两个实验中收集的数据,提出了一个更好的解决方案。
在这项研究中使用了两种研究方法:一种是寻路任务,整个寻路过程被录制视频,以确定变化的地下环境中采取的行动和用于进行寻路的策略。通过记录研究对象的寻路行为,在地下空间移动和停车场内寻路的问题可以变得显而易见。另一种方法是Ericsson和Simon(1993)的有声思维方法。此方法被广泛用于心理学领域,被试者被要求执行任务时表达他们的感受,以分析决策过程。有声思维是很自然的、直接的方法,实验对象仅仅表达了他们在任务中思考的内容。先前的研究同时也表明了有声思维方法有助于揭示被试者的认知误解和操作问题(Nielsen,1993)。在执行这两个实验时,实验对象都被要求进行有声思维,以更好地理解他们在寻路和决策过程中的感受。在实验2的寻路和决策过程中,路径描述任务在寻路任务之前,在这个任务中实验对象被要求口头引导他人到达目的地,以揭示实验对象的认知理解和最常用的策略(Houml;lscher, Tenbrink和 Wiener,2011)。在这项研究中,共20个实验对象参与了这两个实验。每个实验都有10个实验对象(5个男性和5个女性),所有的人都没有去过实验地点。在这两个实验中,有声思维分析是由两个记录者编码,观察到的数据被计算并反映了可靠性。
实验结果
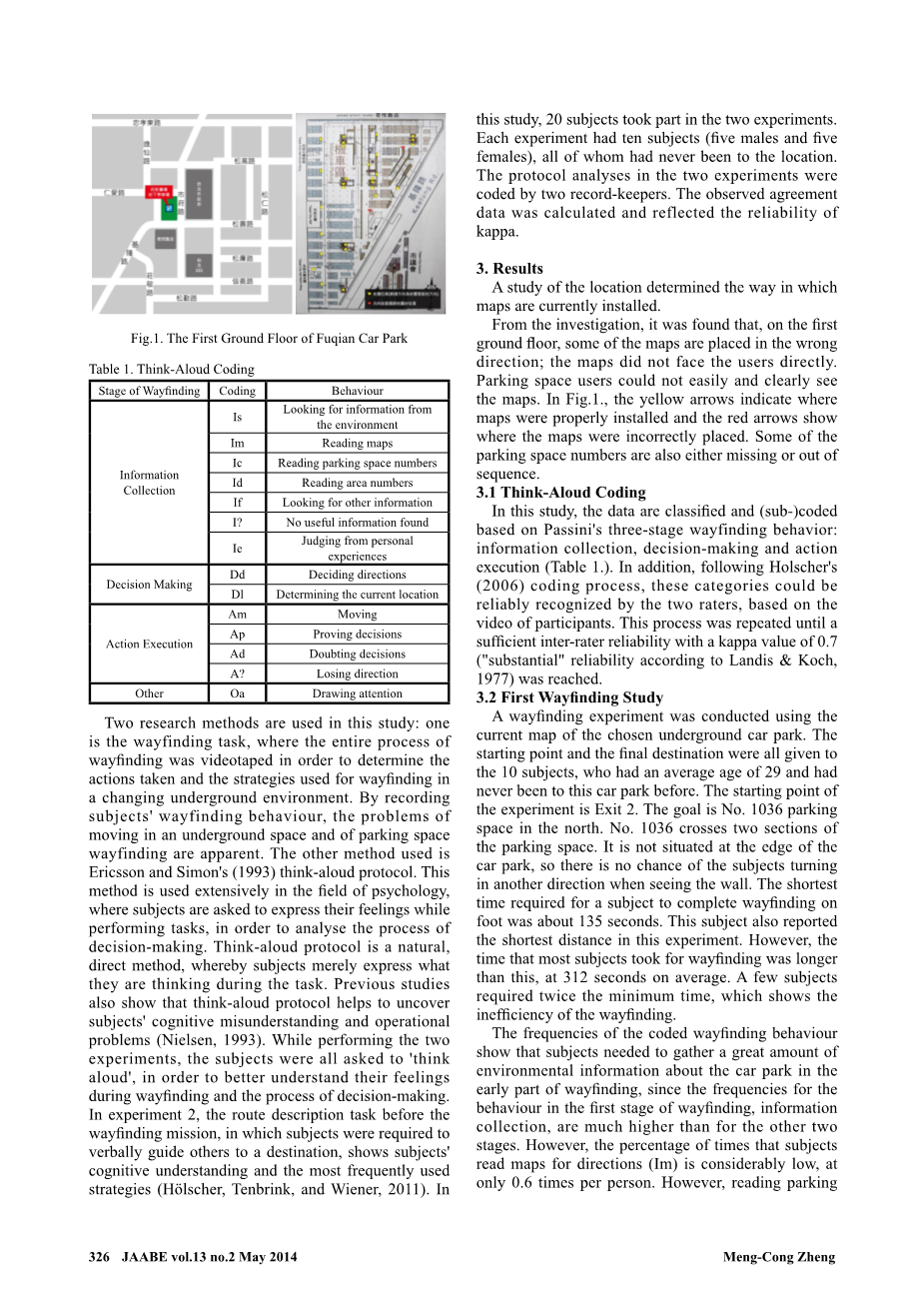
对地点的研究决定了目前地图的安置方式。从调查中,我们发现,在第一层,一些地图以错误的朝向被放置着,这些地图并没有直接面对使用者。因而停车者不容易清楚地看到地图。如图1,黄色的箭头表示地图的正确安置处,红色箭头显示地图的错误安置处。同样,一些泊位号码也出现丢失或是不按顺序排列的情况。
图 1 富钱停车场第一层
有声思维编码
表1 有声思维编码
|
寻路阶段 |
编号 |
行为 |
|
搜集信息 |
Is |
从环境寻找信息 |
|
Im |
阅读地图 |
|
|
Ic |
阅读停车泊位号码 |
|
|
Id |
阅读区域号码 |
|
|
If |
寻找其他信息 |
|
|
I? |
寻找不到有效信息 |
|
|
Ie |
据个人经验判断 |
|
|
作出决策 |
Dd |
决定方向 |
|
Dl |
确定当前位置 |
|
|
执行行为 |
Am |
移动 |
|
Ap |
证实决策正确性 |
|
|
Ad |
怀疑决策正确性 |
|
|
A? |
失去方向 |
|
|
其他 |
Oa |
吸引注意 |
在本研究中,数据基于Passini的三阶段寻路行为——信息收集、决策和行动执行——被分类并(子)编码,如表1。此外,这些类别会基于视频的参与者,依据Holscher的(2006)编码过程,由两个评分者可靠地确认。这个过程被重复,直到达到一个足够的相互信任的可靠性,并且达到了0.7的kappa值(根据Landisamp;Koch的“可靠”的可靠性,1977)。
第一个寻路研究
笔者利用目前选定的地下停车场的地图进行了一项试验。起点和终点都是10名受试者,他们的平均年龄为29岁,之前从未去过这个停车场。实验的起点是2号出口,目标是在北方的第1036个停车位。第1036号穿过了停车场的两个部分,它不在停车场的边缘,所以当看到墙的时候,被试者没有机会转向另一个方向。一名被试者在徒步行走时所需要的最短时间是大约135秒。这个被试者也揭示了在这个实验中最短的距离。然而,大多数被试者所花的时间比这要长,平均为312秒。一些实验对象需要两倍的最短时间,这显示了寻路的无效率。
寻路行为编码的频率表明在寻路早期,研究对象需要收集大量关于停车场的环境信息,因为在寻路的第一阶段,信息收集的频率要比其他两个阶段要高得多。
然而,被试者阅读地图寻找方向(Im)的次数的比例相当低,仅为每人0.6次。但信息收集时阅读泊位号码(Ic)的频率最高平均为每人8.7次,这意味着大多数受试者都试图使用停车空间号码来获取信息。因此,在Ic(阅读泊位号码)之后的, Dd(方向决策)和Am(移动)的频率也比其他的要高得多。
图2 A? (失去方向)的分布
图2表明许多被试者在第10行区域中迷失了方向。在这个停车场,主柱都标上了区域号码,每一行都是一个单元,使被试者记住他们把车停在哪里。然而,区域号和停车空间号是不相关的。被试者通常认为这两个数字是相互关联的,这影响了他们的决策和行动。例如,大多数被试者认为目标停车位,1036,在这个区域,于是向它移动,导致他们迷路。
比较被编码的寻路表现可以看到,大多数AD(怀疑决策)和A?(失去方向)发生在十字路口,可能是因为实验对象对环境不熟悉。图3显示Is(在环境中寻找信息)经常发生在入口附近。然而,泊位号码的排列使得这些数字之间的差距变得相当大,所以研究对象需要不断地从一边移动到另一边,以确定这些停车泊位的数字。当这种情况发生时,它也受到环境的制约。
图3 Is和I?的分布
一些受试者的视野被遮挡,因此他们需要重新确认周围环境的信息。I?(寻找不到有效信息)经常发生在任务开始的时候,被试者阅读地图。一些被试者在地图上寻找有用的信息,但没有找到任何有用的信息。
结果表明,那些很少开车的人比经常开车的人表现得更差。他们绕道(比后者超出24.8%),走得更远(比后者多出28.5米),在寻找过程中(图4),需要更多的时间(比后者多出52.9秒)。这表明,驾驶经验对地下环境的影响有很大的影响。也可以看到,汽车的数量会影响受试者的寻找工作表现。当有更多的汽车时,绕道的可能性要高得多(高出56.4%),所以他们必须走得更远(多出64.7米)(图5)。平均来说,如果那里有更多的汽车,被试者必须走两倍的距离才能到达最终的目的地。在性别方面,男性受试者比女性受试者表现得更好,在绕道手术中所占的比例要低24.6%。他们所走的路程和所花费的时间也少于女性,分别为28.2米和175.5秒。
图4 驾驶经验和驾驶行为间的关系
图5 已停车辆数目和驾驶行为间的关系
第一个寻路实验的结果表明,只有一半的受试者可以通过阅读地图来获得停车位。他们中的大多数都依赖于在地面上标记的停车空间来确定他们的路线。给定位置的所有主要柱子都有区域编号,这帮助参与者记住他们的车停在哪里。然而,一些人错误地认为区域号和停车位数量是相关的。当存在许多停放的汽车时,被试者的视线会被阻塞。所有这些问题都导致了错误的决策。
第二个寻路调查和路线
根据第一次试验中发现的问题,笔者为这个地下停车场设计了一幅新的地图。在这张新地图中,区域号和停车场号通过将停车场重新划分为许多较小的区域,在这些区域中,数字的范围被标记出来,如图6所示。此外,如果两个相邻的停车位的号码不是连续的,那么它们就不会被分组到同一个区域,这样一来,受试者就不会需要太多的时间来做决定,也不需要通过大量的标有泊位号码的车位。第二次实验的起点和终点与第一个实验的终点相同。在这个实验中,路线规划和路线描述也包括在内。受试者被告知指定的停车位号码,并被要求阅读地图,以确定它在哪里,并计划路线。所有的新地图都安装在与原始地图完全相同的位置上。
图6新设计的地图
第二个实验使用的是同一停车场的第二层。十名受试者(5名男性和5名女性)也从未去过这个停车场,他们被要求从2号出口到1036号停车场。寻找方法的最短时间是大约135秒,平均来说,它需要21.8秒的时间才能到达最终目的地,比第一次实验的结果快了50.2秒,即312秒。结果还显示,与图8相比。第一个实验的两个实验的编码行为的频率,被试者所走的距离和绕道的机会是相当一致的;他们在实验中所走的距离比弗斯特的距离要短得多。在执行第二项任务之前,研究对象被要求阅读地图,规划路线,并形成一种策略。因为人们不太需要收集关于停车场的环境信息,所以从这个实验中收集的数据量比第一次收集的要少。然而,地图只允许被试者大致确定目标的目的地和方向;实验对象仍然需要依靠停车场的号码来找到他们的路。因此,Ic(寻找停车位号码)、Dd(决定方向)、Am(移动)和Ap(证明决策)比其他的更频繁。第二个实验的结果显示了A?(失去方向)只在14号被试者上发生一次。图7显示了14号被试者从目标目的地离开。当他发现停车区域的数字号码在增加时,他就会迷失方向。14号被试者无法到达目标目的地,直到他在第10区停了下来,并阅读了新的地图。这也发生在19号被试者身上,他也在第10区停留,直到阅读新地图时才会返回正确的方向。因此,可以得出结论,被试者错误地认为区域号和停车空间号在旧地图上是相关的。
图7 A?, Ad, and Is的分布
结果还显示,Ad(怀疑决策)和Is(从环境中寻找信息)只发生三次。这意味着受试者需要再次评估周围的信息,或者解释该位置的空间信息。与第一次实验不同的是,在第二个实验中,只有在完成任务的开始时才会发生。在被试者进入停车场后,他们必须收集大量的信息来决定去哪里。
与第一次实验类似,平均而言,那些很少开车的人会花更多的时间来绕道而行,即20%多一点,且走得更远,即多出17.5米。总而言之,他们花在寻找道路上的时间比那些经常开车的人要多,多出61.6秒。就性别而言,女性的时间更长,多出20%;走得更远,多出28.5米,且需要更多的时间,多出49.2秒。
分析
对这两个实验的比较(见图8)表明,在进行绕道的过程中,第一个实验的对象比第二实验的实验对象多出26.9%。从距离的角度看,第一次实验的人比第二组的人走了30.8米。至于任务所需的时间,第二个实验的主题是50.2秒。在第一个实验中,“有声思维”的时间也是第二个实验的两倍。所有这些结果都表明,新设计的地图可以更有效地进行导航。
图8 两次实验的驾驶行为发生次数
然而,比较了实验对象的路线规划和实际路线的路线,如图9所示。这表明,当受试者进入停车场时,他们会误判方向。计划路线和实际路线之间存在差异。这些差异表明,在地下空间垂直移动后,停车者可能难以自我定位。
图9 计划路径和寻路路径的比较
表2 在被试者路径描述中停车场的意象元素
|
分类 |
车库中的元素 |
被提及的次数 |
|
道路 |
驾驶路径 |
2 |
|
边缘 |
可停区域和 全文共6799字,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[16030],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

