
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
客车后悬挂机构五连杆硬点的运动学分析和参数灵敏度分析
Balike, Krishna Prasadlowast;
机械工业工程系
Rakheja, S
机械工业工程系
Ion Stiharu机械工业工程系
CONCAVE研究中心 Concordia大学,加拿大蒙特利尔,H3G 1M8
摘要:
本文分析了现有的运动学模型,即轿车五连杆后悬架机构的运动学模型。分析模拟了车轮中心和接触面轨迹,以及其他基本悬架运动学参数,使其作为车轮上跳和回弹的函数的公式。在多体动力学软件ADAMS/view中构建悬架模型,以验证所讨论模型的准确性。发现运动学模型的仿真结果受到轮心假定速度分量大小的影响,并且当假设小的速度作为模型输入时,结果与ADAMS模型匹配。本文讨论了一种灵敏度分析方法,该方法揭示了悬挂点位置对车轮中心轨迹和其他运动参数的影响。从灵敏度分析获得的信息可以有效用调整硬点的方式,以获得期望的运动学参数。利用灵敏度分析的结果,对现有悬架的两个硬点进行重新定位,结果证实,改进后的悬架,外倾角得到了优化,且车身高度略有降低。
1引言
任何机构的位置和速度分析,若不考虑作用在其上的力的作用,通常称为运动学分析。车辆悬架机构的运动学涉及悬挂机构的铰接和垂直行驶期间车轮方向的变化[1]。车轮从全上跳行驶到全反弹时的位置和方向强烈地影响车辆的行驶平稳性和方向动力学特性,并且车轮的位置和方向由悬架机构[2]确定。从文献中可以明显看出乘客的操控动态特性是车辆设计中的主要关注点,因为大量的研究都集中在这个问题上[3-5]。为了从悬架获得所需的操纵、方向稳定性和轮胎磨损特性,必须在悬架设计过程中考虑这些问题。车辆悬架系统设计的初始阶段涉及四分之一车的运动学模型的开发,以通过将机构元件视为刚性构件来研究悬架完全上跳与反弹。在此阶段,包括轮胎,弹簧,衬套和阻尼器并不重要[4]。通过调整悬架硬点位置(连接位置在本文中称为硬点)来优化悬架几何结构。在此阶段完成目标所需的车轮路径,但这是一项具有挑战性的任务。只有了解每个硬点对车轮路径的影响,才更容易获得优化的悬架几何。
独立悬架的位置分析可以通过平面分析来实现,在最近的许多高端客车中部署的多连杆悬架形成了空间机构,这种机构的平面运动学分析很复杂[1]。多连杆悬架是空间机构,许多研究人员对分析多连杆悬架运动学分析方法表现出浓厚的兴趣[6-11]。 Suh [6]利用位移矩阵方法来求解关节的位置,速度和加速度。 Lee等[7]用速度矢量方法对轮心和联合中心进行位置分析。 Knapczyk等人[8]利用矢量代数方法提出了多连杆悬架的位移分析方法,并将悬架作为一种修正机构,并将上部两个连杆拆开。通过解决优化程序进行分析描述同种释放关节之间的距离仍等于断开部件的长度的条件。罗卡等人[9]用同样的方法重复运动学分析,并将结果与使用ADAMS / view软件开发的模型的结果。 Knapczyk等人[10]通过实验验证了文献[8]中的方法。这些配方使用螺旋微积分衍生而来,非常复杂。参考文献[8-10]中的研究是侧重于弹性运动学分析,并没有解决轮心路径上硬点位置变化的影响。 Simionescue等人[11]认为悬架是从刚体释放的导引机构其关节并沿着理想化的垂直轨迹在连续位置移动。为了找到在同种释放关节之间的距离变化尽可能小的关节配置,定义了目标函数。最小化的目标函数产生了改进的悬架性能,但目标函数的定义是假定车轮垂直行驶期间车轮的方向应该是垂直的,这将具有一些缺点,这将在后面解释。此外,上述研究都没有在他们的研究中解决运动比率问题,这从车辆的乘坐动态角度来看非常重要。
本研究旨在探索一个简单的运动学模型来模拟运动学参数,并执行多连杆悬架机构对硬点位置变化的运动学敏感性。 本研究考虑了Lee[7]提出的基于速度方程组的多连杆悬架运动学模型。然而,在参考文献[7]中没有示出模拟结果。我们不知道其他地方发布的模型验证。通过比较模拟结果与其他模型验证模型是本研究的主要目标之一。 随后,探索这种方法用于计算传动比的有用性,并开展了对硬点位置的运动参数敏感性的研究,以便对悬架硬点进行调整,这是本文的其他目标。
本文的结构如下:第2节简要介绍了五连杆悬架的几何结构。根据Lee在参考文献[7]中提出的方法,五连杆悬架机构接头的速度方程为第3节中的基本原理。第4节描述了悬架运动学参数的推导,并解释了各自对车辆性能的重要性,第5节描述了在ADAMS / view中开发的悬架模型。 在第6节中讨论了与验证相对应的数值结果。所提出的灵敏度分析方法连同数值结果在第7节讨论,第8节给出结论性意见。
2五连杆悬架的几何形状
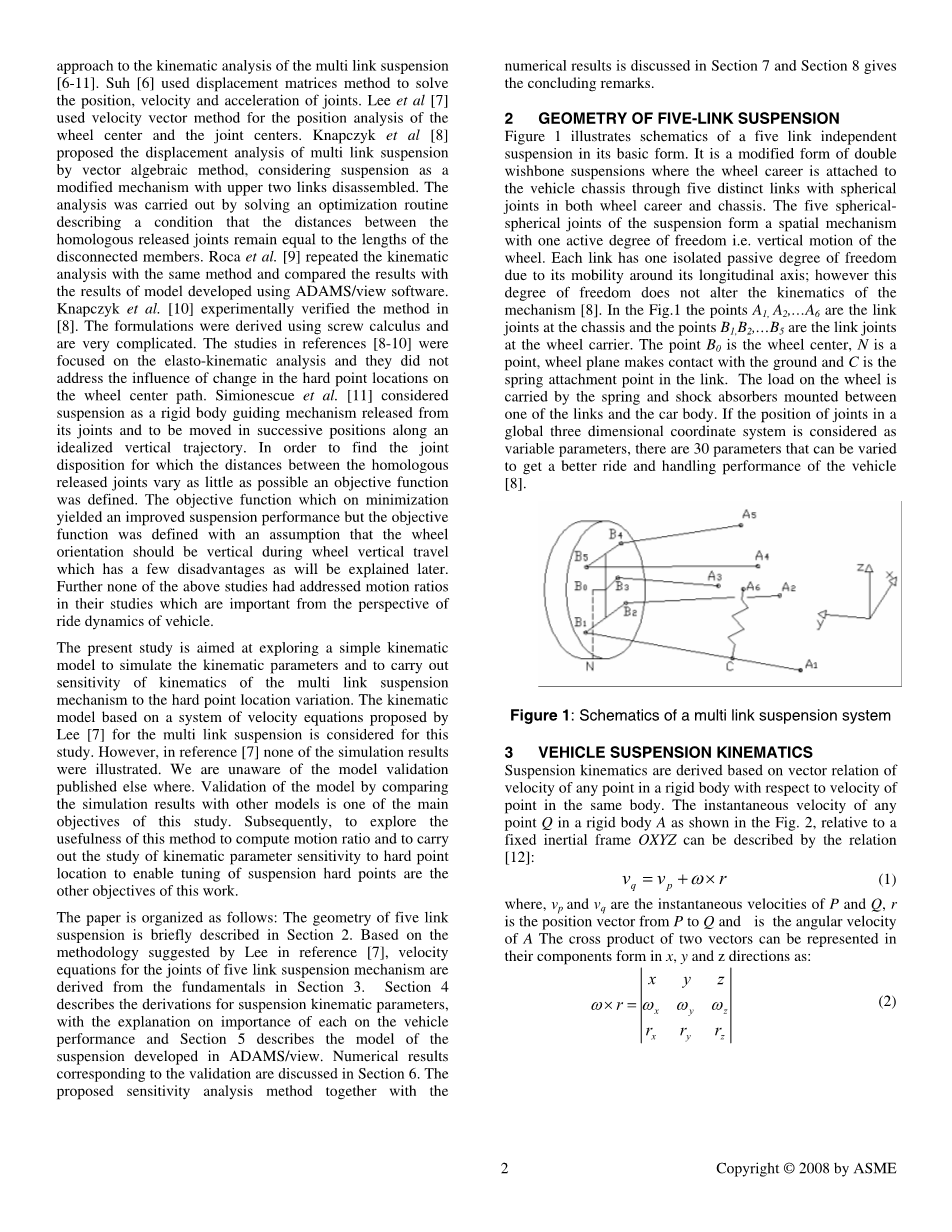
图1展示了基本形式的五连杆独立悬架的原理图。它是双叉形悬架的改进形式,其中车轮通过车轮主销和底盘中的五个不同的带有球形接头的链接连接到车辆底盘。悬架的五个球形接头形成具有一个主动自由度的空间机构,即车轮的垂直运动。由于其纵向轴线的移动性,每个链路具有一个孤立的被动自由度;然而这个自由度并不会改变机构的运动学[8]。在图1中,点A是底盘上的连杆接头,点B是轮架上的连杆接头。点B是车轮中心,N是车轮平面与地面接触点,并且C是连杆中的弹簧连接点。车轮上的负载是由安装在其中一个连杆和车身之间的弹簧和减震器携带。如果将全局三维坐标系中的关节位置视为可变参数,则可以改变30个参数,可以更好的驾驶性能和车辆操纵性能[8]。
图1:多连杆悬架系统原理图
3车辆悬挂运动学
基于刚体中任意点的速度与同一物体中点的速度的矢量关系推导出悬架运动学。 如图2所示,相对于一个固定的惯性框架OXYZ,刚体A中任意点Q的瞬时速度可以用关系[12]来描述:
(1)
其中,Vp和Vq是P和Q的瞬时速度,r是从P到Q的位置矢量,并且是A的角速度。两个矢量的叉积可以用其在x,y和z方向上的分量来表示:
2 (2)
图2:刚体中任意点的瞬时速度
使用上述矢量关系,可以基于以下假设[4,7]为悬架机构指定各个关节位置的速度,其中,[A]是基本上由关节之间的矢量形成的矩阵,{q}是一个未知速度矢量和{f}是假定的垂直速度输入。当为轮中心垂直速度分量选择一个值时,可以求解该组方程,转向节中的每个点都移动一个与方程有关的小距离,并产生一组新的坐标。对于Delta;t的参数时间,
车轮中任意点的行驶距离可以估算为速度与时间的乘积。
1)车辆底盘是刚性和固定的
2)悬架的连接是刚性的
3)轮架或转向节是刚性的
4)关节中的弹性运动学效应被忽略
5)车轮是刚性的,锁定并刚性固定在轮架上以便构成它的一部分
由于通过假设,当轮架通过相对于固定参照系的三维空间中的路径时,轮架是刚体;它将以瞬时角速度omega;围绕瞬时轴旋转。关节上每个点的速度可以由关系确定:
(3)
其中VBi是点Bi的瞬时速度矢量,omega;是瞬时角速度矢量,rB0Bi是从B0点到Bi点的位置矢量,下标i表示链路数,omega;times;requiv;,是omega;和r的叉乘。刚体中每个点的瞬时角速度保持不变[12]。 由于假设底盘是固定的,点Ai也是固定的,点Bi的速度限制在AiBi的90°处。从B到A的向量的点积和是每个链路的瞬时速度向量为0的条件,得到第二组等式:
(4)
其中eAiBi是表示从点Ai到Bi的链接的向量。 等式 (3)可以根据其沿x,y和z轴的分量重写为:
其中,下标x,y和z表示各个方向上矢量的分量。 同样,(4)可以重写,将其分解为组件形式,
从方程 (5-8)可以为五个链节及其相应节点中的每一个编写四个方程,因此共有20个方程和21个未知数。 未知数以六个点的速度三个分量的形式表示,包括五个关节和车轮中心点以及轮架的角速度的三个分量。 这个不确定的方程组可以解决,如果其中一个未知可以适当地假定。 由于车轮的自然路径是垂直的,因此可以适当地假设。 现在,可以通过求解20个方程来计算其他20个未知数。重新排列方程。(5-8)为每个链接
可以写成矩阵形式[4],
(9)
其中,[A]是由关节之间的矢量形成的矩阵,{q}是未知速度的矢量,{f}是假定的垂直速度输入。当为轮中心垂直速度分量选择一个值时,可以求解该组方程,转向节中的每个点都移动一个与方程有关的小距离,并产生一组新的坐标。对于Delta;t的参数时间,车轮中任意点的行驶距离可以估算为速度与时间的乘积。
其中,xi是车轮组件中任何关节中心的位移。 任何一点的新位置都是旧位置和位移的总和。 如果我们假设参数时间Delta;t是一致的,那么我们可以写出,
1 (11)
每当车轮中心在垂直方向上移动指定的值时,通过求解矩阵可以模拟作用于轮中心的连续移动的关节的位置。
4悬挂运动学参数分析
车辆的操纵和平顺性受到一些悬架运动学参数的影响,例如车轮行驶时的外倾角,前束角,侧倾中心高度和传动比变化[13]。 这些参数与车轮中心路径有关。在本研究中,只考虑前视运动学参数。 本部分通过扩展速度关系式确定轮心轨迹,车轮接触轨迹或半轨变化,外倾角,侧倾中心高度和运动比。用于这些推导的坐标是SAE车辆坐标系,即x沿着纵向,y沿着横向并且z沿着车辆的垂直方向,并且原点位于垂直于地面并且穿过车轴[14]的平面中
4.1轮心和接触点的轨迹
在悬架的上跳和回弹运动期间,车轮中心和车轮-地面接触点在x和y(纵向和横向)方向上所遵循的路径是任何悬架的运动学分析中的主要关注点之一[1,8]。“轨道变化”已知的现象是当在垂直于路面的方向上观看时轮胎在横向方向上的印迹[1]。由于车轮的垂直行程可能会发生轨道变化,如碰撞情况。由于它涉及横向运动,轮子和路面之间会有一些相对运动。这种横向运动导致轮胎产生横向力,这将导致轮胎打滑,导致车轮方向发生变化。车辆驾驶员必须纠正转向才能恢复方向。跟踪改变必须最小化,以使车辆具有良好的方向性[2]。这使得研究车轮轨道变化是一个关键问题。
方程 (9)为分配的垂直速度分量的连续步长产生轮心位置。 假设车轮是刚性的并且固定在车轮支架上,这代表了车轮完全锁定并且车轮中心连续位置已知的情况,接触补丁点N的位置分析可以使用以下关系进行。
(12)
其中,Vn是车轮接地点的速度,如图2中的点N所示。上述方程在x和y方向上的分解给出了接地面的横向和纵向位置。 估算的连续位置通过车轮抖动回弹获取接触面路径。
4.2弧度变化
静态外倾角是当从前方观察时车轮平面从垂直于路面的平面的倾角,并且当车轮的顶部向外倾斜时出现正弯度,并且当车轮的顶部向内倾斜时出现负外倾角。 在车辆中有意识地设置一个小的静态外倾角以实现减小轴向轴承压力并减少主销偏移量,但是车轮的大外倾角会在接触面上产生横向力,这通常会使车辆转向不足,并导致轮胎磨损 并加速磨损[14]。
在车辆上跳和回弹期间,所有的独立悬架都可以假设为围绕一个假想的瞬时中心在y-z平面上旋转,从而导致车轮相对于地面具有外倾角[13]。 类似地,在车辆转弯期间,车辆侧倾引起车轮外倾角的改变,并且该外倾角被称为侧倾角。 车轮外倾角会导致轮胎产生横向力,在理想化的悬架机构中总的车轮外倾角变化必须为零[2]。 在这项研究中,分析仅限于车轮反弹和反弹期间的外倾角变化。
由于车轮被假定为刚性地固定到车轮支架,所以外倾角可以与车轮中心和接地面的y坐标相关。 参照图3,车轮外倾角可以被描述为,
其中,Ny和 BOy分别是接地面的y坐标和车轮中心。车轮在垂直行驶中的连续位置时的车轮外倾角会导致车轮上跳反弹时的外倾角变化。
图3:车轮外倾示意图
4.3侧倾中心高度
术语侧倾中心与横向垂直平面中的点相关联,在横向垂直平面上,如果施加横向力,则不会产生簧上质量的任何角位移。侧倾中心高度是侧倾中心在静态位置高于地面的距离。侧倾中心高度有时以车身为参考。最近的研究已经区分了上面定义的侧倾中心,它是通过将接触面与瞬时中心连接而获得的运动侧倾中心[15]。运动学侧倾中心基于车辆左右弹簧刚度之间的对称性假设。当车辆侧倾时,对称性受到干扰,基于四分之一汽车悬架获得的侧倾中心在其对车辆侧倾的影响方面失去其意义。然而,运动学侧倾中心高度及其与车轮上跳反弹的变化被广泛用作定性悬架数据和用于分析车身高度变化。此外,侧倾中心高度决定了车辆制造过程中的轮胎擦洗特性[15]。图4显示了代表悬架[13]的侧倾中心高度的示意图
图4.侧倾中心高度示意图
全文共11761字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15793],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

