英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
大跨度拱桥模态参数的在线自动识别
Filipe Magalhatilde;estimes;,Aacute;lvaro Cunha,Elsa Caetano
摘要:
“Infante D.Henrique”桥是一座混凝土拱桥,横跨杜罗河280米,连接位于葡萄牙北部的波尔图和盖亚城市。最近安装的包含12个加速通道的动态监控系统正在监控该结构。本文介绍了桥梁结构,通过先前开发的环境振动测试确定的动态参数,安装的监控设备以及通过互联网连接处理从桥梁接收的数据的软件。特别强调已经开发和实施的算法,以在正常操作期间从其测量的响应自动识别结构模态参数。所提出的方法为使用协方差驱动的随机子空间识别方法(SSI-COV),然后通过为稳定图的自动分析开发的新算法作为补充。这种基于层次聚类算法的新工具被证明在桥梁前12种模式的识别中非常有效。本文详细介绍了2个月的观察结果,其中涉及超过2500个数据集的分析。结果表明,通过结合使用高质量的设备和强大的识别算法,可以自动估算多种模式的精确模态参数。这些可以被用作损伤检测算法的输入。
绪论
民用基础设施,特别是桥梁的结构健康监测是值得许多国际研究项目注意的课题[1],其目的是为了解决基础设施所有者所关心的问题。
最近技术的进步有助于使永久性动态监测系统的安装和操作更加实用和经济。因此,这种技术用于桥梁健康监测的增加被大家所察觉到。
为了从这些最新的技术发展中获益,并建立一个对桥梁所有者非常有用的系统,有必要对收集到的数据进行连续在线处理,生成可用于损坏检测的输出。模态参数,特别是固有频率可用于此目的,因为它已在桥梁全尺寸试验中得到证实[2,3]。
因此,基于正常运行期间结构响应自动识别模态参数的工具的开发和验证是基本的,因为随后的损伤检测算法的成功取决于模态参数估计的准确性。此外,为了几乎实时地评估健康结构,必须创建强大的例程以在线运行。此功能特别有助于在发生自然或人为灾难后快速评估关键基础设施。
本文提出的“Infante D.Henrique”桥,是一座位于葡萄牙的大跨度拱桥,那里的艺术动态监测系统最近安装了北方的应用程序。加速传感器连续测量的数据通过因特网连接到波尔图大学工程学院(FEUP),并在到达时自动处理。
处理软件包括在线自动识别结构模态参数与其在服务测量的响应。所提出的方法为使用协方差从动随因子空间识别阳离子法(SSI-VOC),其然后被用于通过提供的SSI-VOC方法稳定化图的自动分析开发出一种新的程序的补充,或者通过其它参数标识与类似阳离子方法输出。这个基于层次聚类算法的新工具,以及其在2个月的观察期间获得的结果将被详细介绍。
桥梁概况
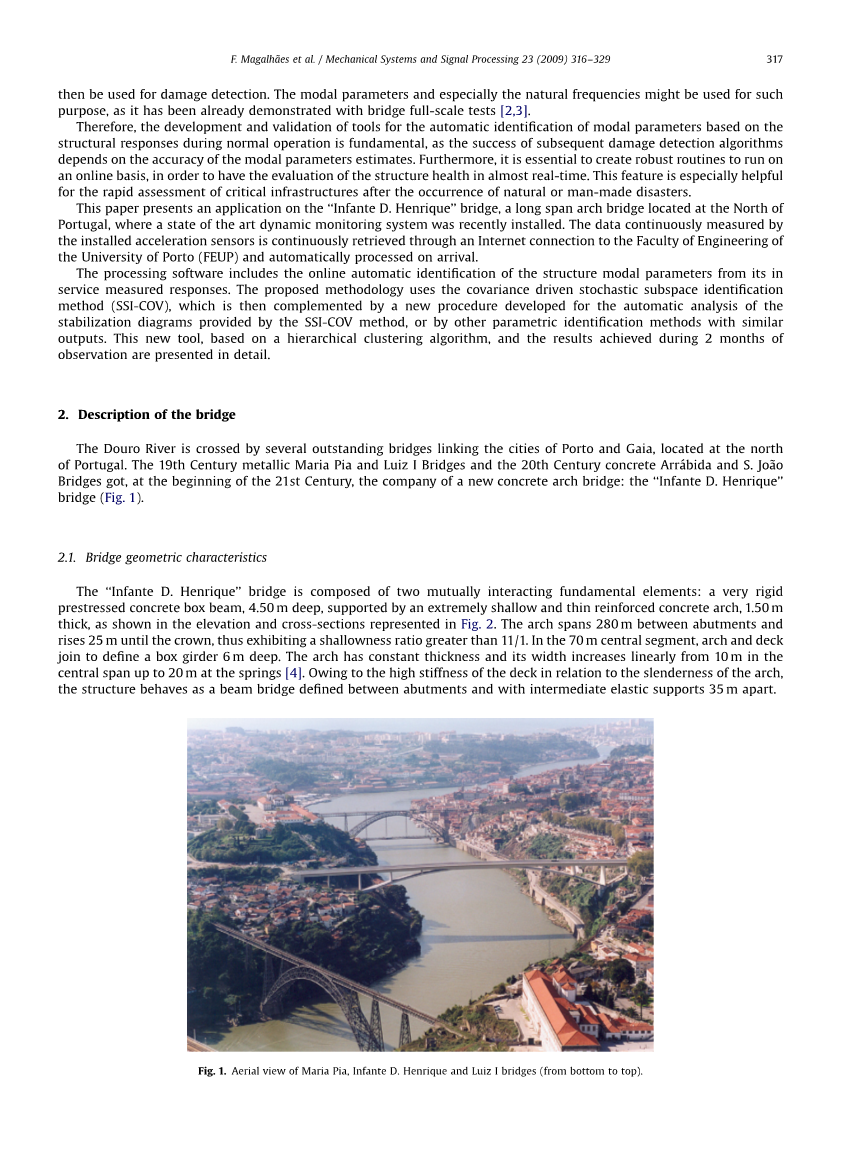
杜罗河由连接葡萄牙北部波尔图和盖亚城市的几座优质桥梁穿过。包括19世纪的metallic Maria Pia桥和Luiz I桥梁、20世纪的混凝土桥Arra#39;bida桥和S.Joaatilde;oBridges桥,以及在21世纪初得到了一座新的混凝土拱桥:“Infante D.Henrique”桥(图1)。
桥型特征
“Infante D.Henrique”桥梁由两个相互作用的基本元素组成:一个非常坚固的预应力混凝土箱形梁,深度为4.50米,由一个极薄,厚度仅为1.5米的钢筋混凝土拱支撑,如图所示正面和横截面如图2所示。拱跨跨桥台之间280 m,并直到拱顶上升25 m,表现出大于11/1的浅度比。在70米的中央段,拱和甲板连接在一起,定义一个6米深的箱梁。拱的厚度不变,其宽度从中央跨度10米线性增加到20米。由于桥面相对于拱门的细长具有高刚度,该结构表现为桥台之间的梁桥以及相距35m的中间弹性支架。
图1.Maria Pia,Infante D.Henrique和Luiz I桥的鸟瞰图(从下到上)。
图2.桥梁的标高和横截面。
图3.前三个横向模式的固有频率和扭转模式(俯视图)。
桥梁模态参数
在桥梁施工之后并且在动态监测系统的安装之前,执行环境振动测试以获得对桥梁模态参数的良好表征。这个测试的描述和相应的输出在参考文献[5]中有详细描述。在本节中,只给出与更好地理解桥梁的动态行为和解释监测系统结果有关的结果。
在环境振动测试中,沿着三个正交方向(垂直,纵向和横向)的加速度共计32点。这提供了与在0和5Hz之间的频率范围内的固有频率相关联的模式形状的良好表征。前三个横向模式在图3中用顶视图表示,而前八个垂直或扭转模式在图4中描绘。
这些实验获得的模态参数与数值对应物进行比较。参考文献[5]显示了已开发的数值工作,并增强了“调谐”数值模型模态参数与实验数据之间的非常好的一致性。
监控系统
“Infante D.Henrique”桥上安装的动态监测系统基本上由12个力平衡加速度计(Kinemetrics,Episensor),两个数字化仪器(Kinemetrics,Q330)和相应的记录单元以及一个互联网路由器组成,并按照图5所示的方案沿着桥梁分布。关于硬件的更详细描述见参考文献。[6]。
该桥大致对称,并且先前执行的环境振动测试已经证明形状近似对称。因此,可用传感器的数量为12个,所以决定仅对该桥的一半进行测量,而不是沿着整个桥涂抹传感器,以获得尽可能多的模式的良好空间特征。因此,这些加速度计分布在波尔图桥墩的中跨和基台之间的四个部分。三个传感器配备每个部分:一个用于测量横向加速度,两个用于下游和上游侧的垂直加速度(环境测试显示分析频率范围内存在扭转模式)。
由数据集成商软件生成ASCII文件的FEUP(波尔图大学工程学院)生成的数据包含具有预定采样率和长度的加速时间序列。为了监测这座桥,选择了50赫兹的采样频率和30分钟的长度。这些文件然后由MatLab例程进行处理,包括在线执行以下任务:
图4.一些垂直或扭转模式的固有频率和振型。
图5.监控系统的方案。
●用原始数据创建数据库(采样频率为50 Hz),以后可用于测试替代处理方法;
●预处理数据以消除偏移并将采样频率从50赫兹降低到12.5赫兹(前12个模式低于5赫兹);
●处理数据,并自动识别模态参数;
●用处理结果创建数据库;
●显示相关性最高的结果。
图6给出了由预处理例程创建的一个曲线图,其说明了在20天内(从2007/12/01至2007年)收集的加速时间序列的均方根(RMS)值的每日和每周变化2007/12/20)。这张图可以用来表征交通的强度,如在周末(2007年12月1日,2日,8日,9日,15日和16日)这个桥的情况下的市中心交通强度。
动态监测系统配有静态监测系统,包括应变计,倾角计和温度传感器。在盖亚一侧,还有一个气象站,可以测量所有环境变量(气温,湿度,风特性,太阳辐射等)。
模态参数的自动识别
模态参数的自动识别是连续动态监测系统最重要的特征之一,因为基于这些动态参数的损伤检测算法的成功与否取决于估计的准确性。因此,在不同的方法之后,正在对这个项目进行大量的研究。
Brincker等人最近提出了频域的非参数技术,该技术是频域分解方法(FDD)的自动实现。[7]。这种方法已经应用于#39;Infante D.Henrique#39;桥梁监测系统收集的数据,并且在固有频率和模态估计方面提供了很好的结果[6]。这种方法的最相关的缺点是固有频率估计值对使用的频率分辨率的准确性的依赖性和估计模态阻尼比的不足。
另外,为了使模态参数的识别自动化,正在对基于数值模型的算法在测量数据(参数方法)上的改进进行了大量研究。在这项工作中,基于SSI-COV方法的这种类型的方法被开发和应用。
首先描述了SSI-COV方法,并简要说明了稳定图的使用。然后,在对现有方法进行简短的文献回顾和对聚类分析的简要介绍之后,详细介绍了所提出的方法。最后,介绍了其应用于已经描述的监测系统收集的数据的结果。
图6.2007/12/01至2007/12/20期间的时间序列RMS值变化。
4.1协方差驱动的随机子空间标识和稳定图
SSI-COV方法使用随机状态空间模型以其离散形式执行模态参数的识别,并假设激励为白噪声,由以下等式表示[8]:
xkthorn;1frac14;A·xkthorn;wk
ykfrac14;C·xkthorn;vk(1)
其中xk是在时刻k的离散时间状态向量;yk是具有采样输出的矢量,A是离散状态矩阵,C是离散输出矩阵,wk,vk是表示由于干扰和模型不准确以及由于传感器不准确而引起的测量噪声的噪声的向量。
SSI-COV方法的出发点基于测量的结构响应时间序列的协方差矩阵,由以下公式给出:
(2)
其中N是时间序列的点数,上标T表示转置。然后这些组织在Toeplitz矩阵中:
(3)
矩阵A和C的识别由矩阵执行(一些算法包括在识别之前应用加权矩阵,但在这种情况下不使用这些矩阵)。该方法的算法基于随机系统[9]的性能,并涉及奇异值分解和最小二乘方程(使用摩尔-Penrose伪逆解决)的分辨率。在识别出状态空间模型之后,模态参数很容易从矩阵A和C中提取[10]。
的SSI-DATA(数据驱动随机子空间identi音响阳离子)方法也是基于以随机状态空间模型的替代方法,但identi音响阳离子直接从原始时间序列开始,而不是使用协方差矩阵。SSI-COV方法速度更快,所需内存更少,因为时间序列在协方差矩阵中被压缩(两种方法的性能比较见参考文献[10]])。
状态空间模型的标识需要定义模型的阶数和实际结构,不可能预测更适合实验数据的模型的阶数,并且更真实地表征结构的动态行为。(在频率范围内,上限远高于系统的物理模式数量分析)。使用高模型阶数导致引入数值模式(也称为杂散或噪声模式),这些模式几乎没有物理相关性,但是需要模拟测量数据中始终存在的噪声。
物理和虚假模式的分离是识别算法中的关键步骤。实现这一目标最流行的方法是创建稳定图。在这些图中,所有模型的模态参数估计值一起表示(模态估计的x轴-固有频率和模型的轴顺序),从而允许识别模型参数的稳定性增加订单。在大多数频率一致的这些模型的出现模式,模式形状和阻尼都CLASSI网络版和稳定可能是物理。只出现在某些模型中的模式被认为是虚假的。模态估计的分类稳定取决于模态参数允许变化的极限定义。图7给出了SSI-COV方法应用于仪表桥中收集的数据集之一所提供的稳定图。在这种情况下,使用以下限制:自然频率变化o1%;模态阻尼系数变化o2%;模式形状估计值之间的最小MAC系数为-0.99[11](当模式仅在比例因子上不同时,该系数等于1,当模式正交时,该系数等于0)。图中显示了12个稳定极点()的垂直对齐,代表了该桥的前12个模式。
稳定图的质量取决于所使用的识别算法,算法输入参数的值以及所分析时间序列的信噪比。
图7.时间序列分析的稳定图在2007/11/26 00:00收集。
在SSI-COV方法的情况下,识别中使用的Toeplitz矩阵的块行数(方程(3)中的i)对后续稳定图的质量有很大影响。因此,在连续监测程序的配置过程中,花时间调整识别算法参数是非常重要的。在本申请中,在等于50(100个相关点-100/12.5=8s(较低频率的8〜0.8E6.4个周期))中获得了良好的结果。
稳定图本身并不能解决模态参数识别问题;它只是一个图形工具,可帮助手动选择更可能代表物理结构模式的极点。在对结构进行持续监控的背景下,开发工具以实现无需用户交互的识别至关重要。
4.2自动识别程序
4.2.1介绍
使用参数化算法自动化结构模态参数识别的研究工作集中在三个互补的方面:识别算法的概念,可以提供更清晰的稳定图,研究额外的参数以表征模态估计,以便对稳定模式进行更有根据的选择,并开发方法以对稳定图中通常呈现的信息进行自动分析。
在开发新的识别算法的领域,一个重要的结果是频域PolyMAX方法,参考文献中描述。[12]。在那里,它声称它提供了非常清晰的稳定图,便于选择物理模式估计值。
关于区分伪造物理模态估计的附加标准的定义,Verboven等人文献[13]提出了一种适用于所有系统识别方法的方法:模态矢量的复杂性(在大多数实际应用中,实际模式是预期的,因此高模式形状复杂度的估计可被认为是虚假的)。其他与特定的系统识别技术有关,其中一些仅适用于输入输出测试。Pappa等人开发的自主程序[14],对于特征系统实现算法(ERA),使用“一致模式指标”(这种方法的特定指标)来分析由锤击测试提供的数据。在参考文献[15],所提出的自动模态识别方法基于频域最大似然估计器和随机验证标准(物理模式的选择基于估计的不确定性),其被用于频率分析响应功能。在参考文献[16],模态转移范数的概念与随机子空间识别方法一起用于分析仅输出模拟数据。参考。[17]提出了一些额外的模式选择技术,从确定性状态空间模型中去除
全文共14714字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15761],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

