英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
贝叶斯缺陷数控制图
c图或缺陷数控制图是用来处理生产过程存在产品缺陷或不合格的情况。针对总缺陷数和单位缺陷数,我们可以设计缺陷数控制图和单位缺陷数控制图,它们均是服从泊松分布。本文将主要研究c控制图,并结合利用贝叶斯方法,从而确定该控制图的控制限,平均运行长度,以及虚报警率。最后将这些结果和经典(频率学派)方法获得的结果进行比较分析。
关键词:贝叶斯分析; c控制图;泊松分布;后验预测密度
1.介绍
在本文中,将研究不合格的控制图表,也称为 c 控制图。不合格品的 c 图或控制图针对的是处理观察到的缺陷或不合格的数量的情况。可以针对每个单元的总不合格或平均数目 制定控制图,该模型由泊松分布很好地模拟。在大多数关于质量控制的标准教科书中,参见例如蒙哥马利 ,泊松参数用 c 表示; 在本文中,泊松参数将由X表示。
如果没有标准的给定 值,那么应该估计为初始样本中不合格的平均数量。 这个不合格的平均数量将由X表示。 从蒙哥马利可知,控制图将被定义为
控制上限(UCL)=X 3
中心线=X
控制下限(LCL)=X-3
前面提到的控制图是当未知值是已知的古典(频率)方法时。 这种情况也被称为“无 标准给定”情况。 当参数未知时,通常的做法是从研究的阶段 I 估计参数。 一旦设置了控 制图表,就会选择独立的检查单元,并确定每个检查单元中的不合格数量并绘制在图表上。
如果一个点落在下限和上限控制范围内,则该过程处于控制中。 如果一个点超出控制下限 或控制上限,则该过程失控。 发生这种情况时,会发出警报或信号。用于统计过程控制的 标准(频率主义)方法取决于长期稳定性以建立可以与其他样品进行比较的模式,Woodward 和 Naylor。
Menzefricke提出了一种贝叶斯方法来获得控制图,其中使用基于贝叶斯方法的预测分 布来推导拒收区并构建控制图。Menzefricke 将它应用于控制图中的已知标准偏差平均值 和未知标准偏差平均值。卡拉布雷斯考虑采用固定样本大小砂采样间隔的过程控制程序, 其中在标准成本和操作假设下开发用于过程控制的贝叶斯模型。卡拉布雷斯说,泰勒和泰 勒表明,非贝叶斯技术不是最优的,并建议根据过程转移到失控状态的后验概率确定行动决 策,采样大小和频率。Bayarri 和 Garciacute;a-Donato 专注于 u控制图,其中一个人对每个检查 单元的不合格数目感兴趣。 当检查单位随时间变化时,该图表被称为 c 控制图。Bayarri 和 Garciacute;a-Donato 通过引入经验贝叶斯模型和贝叶斯顺序方法扩展了 u控制图的常规操作。他们通过使用经典方法突出了以下关注点:
泊松模型通常对 这类数据非常不利;
有相当长的一段时间,过程完全不受控 制,即用于估计参数的那个阶段(即阶段 I)。
无论如何, 以前的信息不能被合并。 我们将为 c 控制图引入贝叶斯方法。 预测密度将用于获得控制图。
控制图限制,平均运行长度(ARL)和报警率将通过使用贝叶斯方法来确定。 这些结果将与使用经典(频率学者)方法时获得的结果进行比较。我们将考虑一个客观的贝叶斯方法,也就是说,我们将利用非信息性的先验。在第 2 节中,将讨论先验分布,后验分布和预测密度的选择,第 3 节将讨论模拟研究,第 4 节将讨论一个例子。结束语将在第 5 节讨论。
2.先验分布,后验分布和预测密度
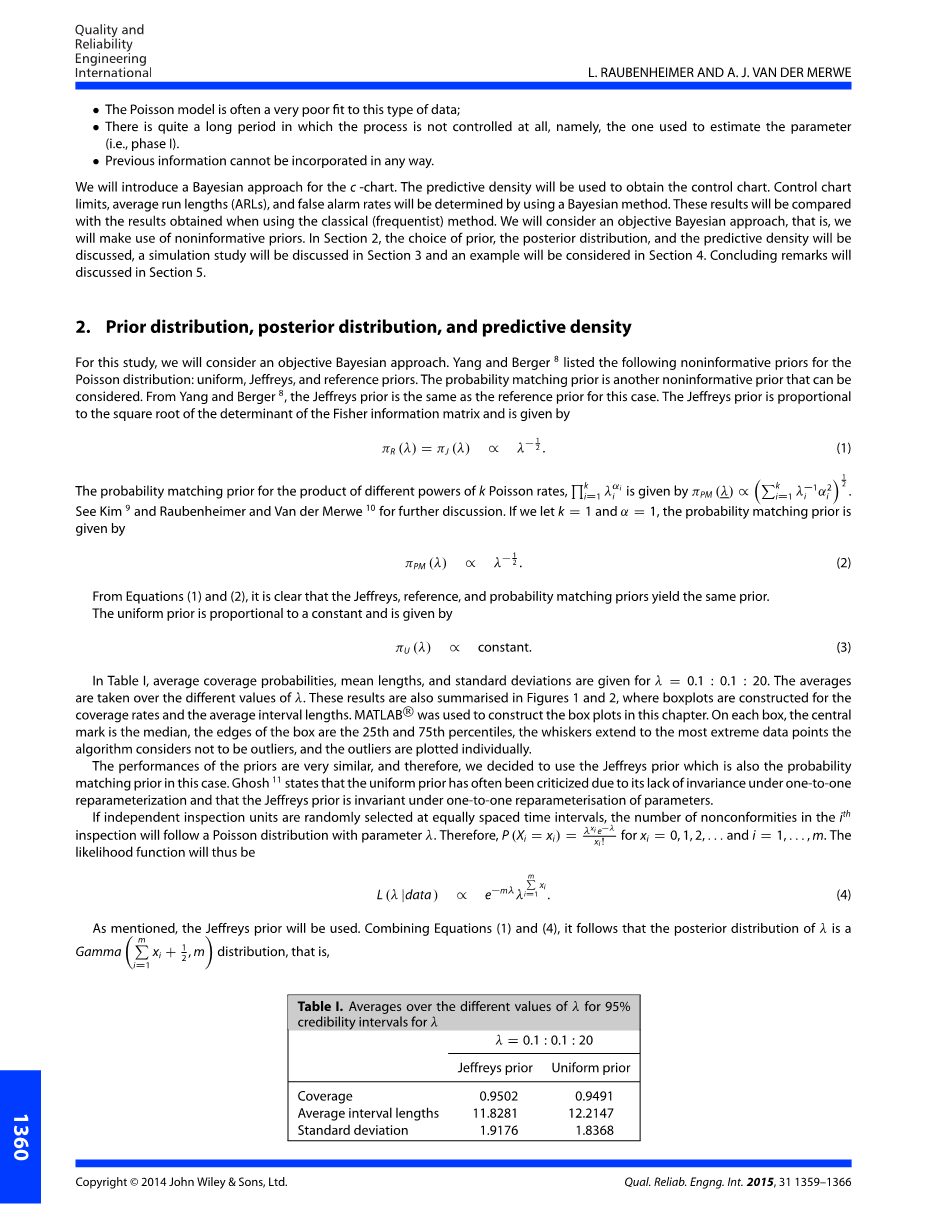
对于这项研究,我们将考虑一个客观的贝叶斯方法。 Yang 和 Berger 列出了泊松分布的以下非信息性先验:统一,Jeffreys 和参考先验。先验概率匹配是可以考虑的另一个非信息性事先。从杨和伯杰开始,杰弗里斯之前的情况与本案例之前的参考情况相同。 Jeffreys 先验与 Fisher 信息矩阵行列式的平方根成正比:
由下式给出 k 泊松速率不同幂乘积的概率匹配先验:、,见 Kim 和 Raubenheimer 和 Van der Merwe 进一步讨论。 如果我们让k=1和 ,先验概率匹配由下式给出:
从方程(1)和(2)可以清楚地看出,Jeffreys,参考和概率匹配先验产生的结果与之 前相同。 统一先验与常数成正比,由下式给出
表 1 给出了公式的平均覆盖概率,平均长度和标准偏差,平均值取不同的 X 值。这些结 果也总结在图 1 和图 2 中,其中框图是针对覆盖率和平均间隔长度。 本章使用 MATLAB 来构建箱形图。 在每个盒子上,中心标记是中间值,盒子的边缘是第 25 和第 75 百分位数,胡须延伸到算法认为不是异常值的最极端数据点,并且异常值是单独绘制的。 前者的表现非常相似,因此我们决定使用先前的 Jeffreys 先验概率匹配。 Ghosh 指出统一先验经常被批评,因为它在一对一的重新参数化下不稳定,并且在参数的一对一重新参数化下 Jeffreys 先验是不变的。 如果以等间隔的时间间隔随机选择独立检验单位,则 第 i 次检验中的不合格数将遵循具有参数 X 的泊松分布。因此,
因此似然函数将为:
如前所述,Jeffreys 之前将会使用。 结合等式(1)和(4),可以得出 X 的后验分布是 伽马分布,即
箱型图显示使用不同先验时的覆盖率分布
图1 覆盖率
箱型图显示使用不同先验时的平均间隔长度分布
图 2. 平均间隔长度
用 xf 表示未来检测单元中的不合格数量,则预测密度(如果 X 已知)为
而且无条件预测密度是
这是一个泊松 - 伽马分布,其平均值和标准偏差很容易得出。 它被称为泊松 - 伽马 分布,因为它是由泊松分布和伽马分布的混合产生的。 预测密度将用于获得控制图。
等式 (7)可以写成
这是一个负二项分布,均值公式和方差公式,后验预测分布具有与后验分布相同的均值但方差更大。 我们将方程(7)中的泊松 - 伽马分布重写为方程(8)中给出的负二项分布, 因为它比负的二项分布模拟比 MATLAB 中的泊松 - 伽马分布更容易。 MATLAB 在统计工具 箱中具有负二项分布的内置函数,而不是泊松 - 伽马分布。 预测分布可用于获取控制图限制。 拒绝区域的大小,然后定义为
如果一个点落在下限和上限控制范围内,则该过程处于控制中。 如果一个点落在控制 下限或控制上限以外,则该过程失控。 发生这种情况时,会发出警报或信号。 过程处于控 制中的#39;信号#39;的概率也被称为虚警率(FAR)。 假设过程保持稳定,预测分布可以用来推导 出游程长度的分布。 给定 X 和表格处理,运行长度 r *的分布是几何参数 FAR,即#39;信号#39;的 概率。 ARL 计算公式如下:
如果过程处于控制中,FAR 的预期标称值为 0.0027,ARL 的预期标称值为
3.模拟研究
我们在这个模拟研究中的目标是使用频率论方法和提出的贝叶斯方法来比较无条件 ARL 和无条件 FAR。 对于给定的 m 和 X 值,将计算控制下限和上限。 用于 m 和 X 的值与 Chakraborti 和 Human 使用的值相同。 使用贝叶斯方法时,预测密度将用于获得控制图限制。
考虑下面的和模拟研究。 Chakraborti 和 Human 考虑了这些价值,并使用经 典(频率主义)方法来获得无条件 FAR 和无条件 ARL。 我们将考虑这些数值并应用所提出 的贝叶斯方法来获得无条件的 FAR 和无条件的 ARL。 模拟的数量等于 10,000。 表 II 和 III 给出了使用经典和贝叶斯方法的给定 m 和 X 值的结果。
运行长度的值越大越好。 正如 Chakraborti 和 Human 所述,控制图的表现通常是根据 其运行长度分布来判断的。 游程长度分布是随机变量的概率分布,它表示在图表上观察到 第一个信号之前必须采样的检测单元的数量。 结果在表 2 中给出。 从这个模拟研究中,我 们可以得出结论,贝叶斯方法通常比传统方法提供更大的 ARL。 大部分 m 和 X 的选择都是 这种情况,除了考虑 ARL 时的 X 值为 8, 10 和 20。 经过表 II 的仔细研究,经典的方法是显 而易见的,当 X 等于 8 和 10 时,ARL 有很大的增加,然后当 X 等于 20 和 50 时 ARL 降低。 对于贝叶斯方法随着 X 的值增加,ARL 增加。
FAR 的值较小,因为 FAR 是过程实际处于控制中时控制图给出信号的概率。 结果在表 III 中给出。 从这个模拟研究中,我们可以得出结论,贝叶斯方法通常比经典方法提供更 小的 FAR。 大部分 m 和 X 的选择都是这种情况,除了 X 值 2(m 小时)和 10(当 m 大时)考 虑 FAR 时。 当公式时,对于几乎所有的 X 值,贝叶斯方法给出的 FAR 略高于经典方法。 当 公式时,对于所有 X 值,贝叶斯方法给出的 FAR 比经典方法小。 从贝叶斯方法获得的 FAR 一般接近 FAR 的期望值,即 0.0027。 我们获得的经典方法的结果与 Chakraborti 和 Human 获得的结果类似。
图二 使用频率主义和贝叶斯方法的无条件平均运行长度
4.例子
考虑以下来自第 277 页的蒙哥马利例 6-3 的例子。 Chakraborti 和 Human 也考虑了这个 例子。 这个例子处理了在 100 个印刷电路板的 26 个连续样品中观察到的不合格的数量。 检测单位定为 100 块板。 26 个样本包含 516 个不符合项,X 按公式估算。 发现 6 号和 20号机组失控,经过进一步调查后被淘汰。 使用剩余样本,公式和公式,计算修订后的限制。 每个检验单位的不合格数平均重新计算为公式。
考虑到这个例子,我们有公式和公式。 如 前所述,我们将使用公式前的 Jeffreys。这将导致伽玛后验,伽玛公式。例如,后验分布将 是伽玛公式。图 3 显示 X 的后验分布。 图 4 显示了预测密度函数的条形图, f 公式,其中 xf 是未来检测单元中不合格的数量。 预测密度将用于获得控制图限制。 摘要后验分布统计:
平均公式为,标准偏差公式为,中位数 公式为
95%的置信区间公式为
对于观察值,公式,将通过查看条件 ARL(CARL)和条件 FAR(CFAR)来调查图表的性 能。 控制图限制,CARL 和条件平均 FAR 将使用经典(频率主义)方法并使用贝叶斯方法计 算。 结果在表 IV 中给出。 从 Chakraborti 和 Human,我们使用公式来计算 CARL 和 CFAR。
从表 4 可以看出,贝叶斯方法比传统方法提供了更宽的时间间隔,这导致 CARL 的值更 大,CFAR 的值更小。 使用贝叶斯方法时的 CFAR 等于 0.0037。 这个值比从传统方法中获得 的 0.0050 的 CFAR 更接近标称值 0.0027。
表三 使用频率主义和贝叶斯方法的无条件报误率。
显示lambda;的后验分布的图表
图三 lambda;的后验分布图
图四 预测密度的条形图
表四 公式和公式的下限控制、控制上限、条件平均运行长度(CARL)和条件报警率(CFAR)
5.结论
通过为 c 图引入贝叶斯方法扩展了 c -chart 的通常操作。 从扩展模拟研究中,使用不 同的检测单元数量和数量,我们得出结论:建议的贝叶斯方法给 ARL 提供了更大的值,而 FAR 提供了更小的值。 FAR 的值较小,因为 FAR 是过程实际处于控制中时控制图给出信号 的概率。 从贝叶斯方法获得的 FAR 通常更接近于 FAR 的预期标称值,0.0027。 贝叶斯方法 通常具有更宽的控制限制。 Bayarri 和 Garciacute;a-Donato 给出了推荐贝叶斯分析的以下原因:
控制图基于未来的观察,而贝叶斯方法对于预测非常自然。
估计未知参数的不确定性得到充分处理。
在复杂模型和顺序情景下的实施不会造成方法上的困难,数值模型很容易通过蒙特卡洛 方法处理。
目标贝叶斯分析是可能的,而不需要引入除模型外的其他外部信息,但是如果需要,可 以将任何类型的先验信息并入分析中。
贝叶斯方法对时间序列的二阶统计过程控制
SPC 的经典工具是控制图,如 Shewhart,累计和(CUSUM)和指数加权移动平均值(EWMA)。 他们的工作方式如下。 首先,人们仔细分析第一阶段的数据,一个以固定大小的历史数据 集,以提取足够的参数信息。 应该调查任何可能的参数变化,以便充分了解变化的原因。 然后,在阶段 I 数据中收集的信息被用于监测阶段 II 数据,在这个数据流中有新的观察结 果出现,并且在每次观察之后应该做出是否发出失控报警的决定。 这些控制图中的每一个 都有两个控制极限,即上限控制(UCL)和下限控制(LCL),其取决于参数 theta; 的值。 在大多 数情况下,theta;的真实值是未知的,并且通常在这里应用广泛使用的“插件”方法。 它使用 来自第一阶段数据的参数估计,就好像它们是第二阶段数据控制的真实值。
自从独立正常数据的
全文共6681字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15689],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

