英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
有风条件下行驶车辆运动及非定常空气动力学的耦合分析
摘要:
双向耦合的全车运动和周围的湍流运动在完善的公路车辆非定常空气动力模拟器中已经实用化。大涡模拟(LES)技术已被应用到再现非定常湍流运动,同时非结构化有限体积法也被采用去全面研究道路车辆复杂的几何形状。将车辆动态运动的三自由度方程纳入到开发的大涡模拟代码中,通过在非惯性参照系中耦合任意拉格朗日欧拉(ALE)方法和纳维-斯托克斯方程对该运动进行数值再现。仿真代码基于大规模并行处理器实现,以满足全面道路车辆的大规模长期空气动力学仿真的需求。作为耦合分析的典型应用,展示了一个简单的重型卡车在有风条件下的非定常空气动力学模拟,并研究了非定常空气动力学对卡车运动的影响。将得到的结果与传统的准稳态分析结果进行比较,确定车辆路径和偏航角度的某些差异。过渡空气动力学对驾驶员感知变量的影响是显著的。这些结果清楚地表明了估算车辆运动分析中非稳态气动力的重要性。
关键词:
大涡模拟;汽车空气动力学;耦合分析
1 引言
在车辆设计过程中,车辆的空气动力学采用稳态或准稳态分析方法对其评价。然而,车辆的非定常空气动力效应同样需要引起足够的重视。有一些典型情况对非定常空气动力学的理解是至关重要的,例如:大气湍流对气动阻力的影响,突发的侧风条件下运行的稳定性,在高速下的行驶稳定性。在所有情况下,我们所面对的问题与风洞中理想的稳定测量和道路上的真实不稳定条件之间的相关性密切相关。
在过去的四十年中,已经进行了一系列关于车辆在阵风条件下运行稳定性的实验研究[1-3]。在之前的文献中,已经表明了当车辆受到阵风的侧风时横摆力矩的明显超调。然而,这种非定常空气动力学对车辆直接运动的影响,特别是其安全性方面的影响尚未完全和定量地说明。事实上,在当前对车辆运动的分析[4]中,车辆运动方程中包含的空气动力学仍然被认为是准静态的,因为通过风洞测量或路面测试对非定常空气动力学进行估算是非常困难的。大型涡流模拟(LES)是评估作用于车辆上的瞬态气动力的有希望的后备技术[5]。因此,我们开发了一种基于LES的数值方法来估算道路车辆的非定常空气动力学,并将这种方法应用于某些常规风洞或道路测量难以使用的情况[6-8]。计算代码基于非结构化有限体积法,以处理具有非常复杂几何形状的全尺寸道路车辆。考虑到车辆的运动[6]中应用的滑动网格方法和[8]中应用的任意拉格朗日欧拉(ALE)方法[9] 这两种移动边界技术被整合到代码中。
在这项研究中,通过将其与车辆动态运动的三自由度方程和驾驶员的反应模型相结合并将所开发的数值方法扩展来研究车辆运动和车辆空气动力学之间的相互作用。将所开发的数值方法扩展。作为表示车辆平移运动引起的大位移一种额外的移动边界技术,纳维-斯托克斯方程被纳入了非惯性参考系中。该方法与ALE方法结合使用,用于估算旋转运动。全尺寸车辆的耦合分析不仅需要表示车辆复杂几何形状的大规模计算网格,还需要用以表明车辆运动的时间尺度的长期空气动力学模拟,该时间尺度比车辆周围的湍流时间要长。为了满足这种高计算成本的需求,计算代码针对大规模并行处理器进行了优化。
作为完善的数值方法的一种应用,非定常空气动力学和车辆运动的耦合分析[10]已经当重型卡车遇到突然的侧风时,卡车因其瞬间的空气动力作用而改变其路径的情况下得到了证明。
A 方向盘角度(弧度)
C 等效转向系统的阻尼系数(牛米秒/ 弧度)
Cp 压力系数( - )
CSm SGS湍流模型的马格林斯基模型模型系数( - )
CS 车辆的侧向力系数( - )
Cym 车辆的横摆力矩系数( - )
lf, lm, lr 从重心到车辆的前轴,中轴和后轴的距离(米)
df, dm, dr 车辆的前轴,中轴和后轴的车轮轨迹(米)
fd 壁面边界附近的湍流效应阻尼因子
Fd 驾驶员的转向力(牛)
Fxij, Fyij 轮胎的纵向和横向方向的轮胎力(牛)
Fx,ij, Fx,ij 在车辆的纵向和横向方向上的轮胎力(牛)
Fw,x, Fw,y 作用在车辆上的空气动力纵向和横向力(牛)
fri 在第i个方向上的非惯性参考系上的惯性力(牛 )
Kst 转向系统的等效弹性系数
m 车辆质量(千克)
Mw,z 作用于车辆的空气动力横摆力矩(牛米)
n 转向比倒数 (–)
p 压力(帕)
r 方向盘半径(米)
S 车辆的正面面积(米^2)
ui 第i个方向的流速(米/秒)
ugi ALE方法在第i个方向的网格变形速度(米/秒)
t 时间(秒)
Tr 延迟反应的时间间隔(秒)
TSAT,ij 轮胎的自调心转矩(牛米)
U,V 车辆的纵向和横向速度(米/秒)
VCW 侧风速度(米/秒)
VCW,max 最大侧风速度(米/秒)
VR 空气与车辆之间的相对速度(米/秒)
xi 在非惯性坐标系中的第i个方向上的坐标(米)
X,Y 车辆重心的绝对坐标(米)
y 墙壁距离( - )
bw 气动偏航角(弧度)
d 车辆前轮的转向角 (弧度)
m 空气的动态粘度(米^2/秒)
mSGS 分网格尺度涡流粘度(米^2/秒)
W 车辆的偏航角度(弧度)
e 预计路线偏差(米)
s 预计时间(秒)
2 数值方法
2.1 目标车辆和状态
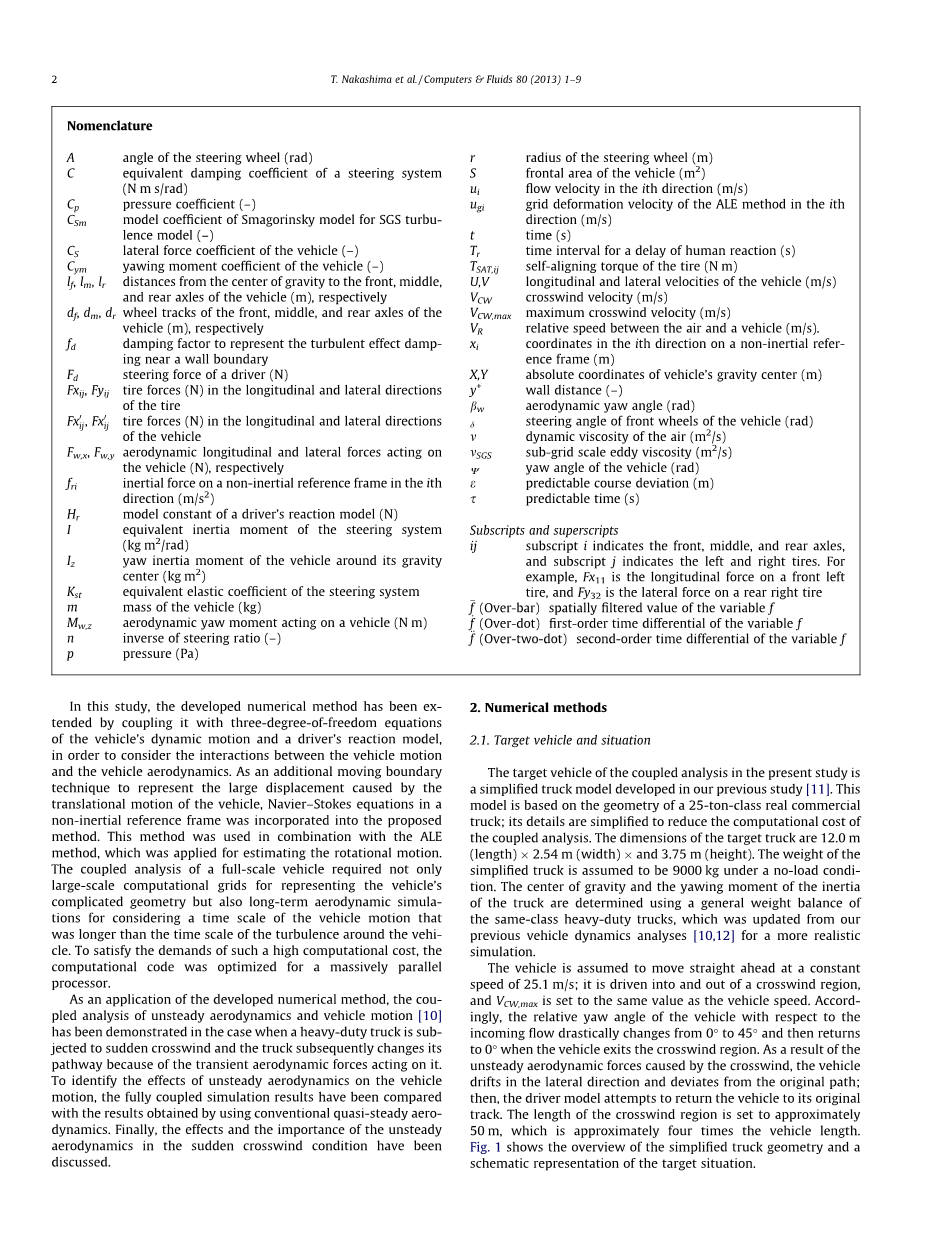
本研究中耦合分析的目标载体是我们以前的研究[11]中开发的简化卡车模型。 该模型基于25吨级真实商用卡车的几何形状简化其细节以降低耦合分析的计算成本得到。目标卡车的尺寸为12.0米(长)2.54米(宽)和3.75米(高)。 在无负载条件下,简化卡车的重量假定为9000 kg。 卡车惯性的重心和偏转力矩采用相同等级的重型卡车的一般重量平衡来确定,该卡车根据我们以前的车辆动力学分析进行了修正[10,12],以获得更逼真的模拟。
假定车辆以25.1m / s的恒定速度直线前进; 它被驾驶进出侧风区域,并且VCW,max被设定为与车辆速度相同的值。相应地,车辆相对于输入流的相对偏航角从0°急剧变化到45°,然后当车辆离开侧风区域时返回到0°。由于侧风引起的气动力不稳定,导致车辆横向偏移并偏离原路径,随后,驾驶员模型尝试将车辆返回到其原始轨道。 侧风区域的长度设定为大约50米,这大
图1.目标重型卡车的几何形状和突然侧风的情况 约是车辆长度的四倍。图1显示了简化的卡车几何图形和目标情况的示意图。
2.2 控制方程
本节将介绍流体动力学和车辆动力学分析的控制方程。 在描述每个分析模型之后,将会提到两种分析的耦合。
2.2.1 流体动力学分析的控制方程
假设不可压缩的牛顿流体,流体运动的控制方程由空间滤波连续性和纳维-斯托克斯方程给出。由于车辆周围存在高雷诺数湍流,分配的数值网格无法捕获由子网格尺度(SGS)应力表示的相对较高的波数湍流。为了在流体动力学分析中处理车辆运动,采用两种数值方法。车辆的水平平移运动由固定在车辆重心上的非惯性坐标系中的纳维-斯托克斯方程表示。另一方面,车辆的偏航,俯仰,滚动和垂直平移运动基于计算网格的变形来估计。为此,我们采用了任意的拉格朗日-欧拉(ALE)方法。图2显示了流体动力学分析的坐标系的定义。坐标系的原点固定在车辆的重心位置。但是,坐标轴的方向不会因车辆的偏航旋转而改变。方向x1,x2和x3分别定义为车辆在直线路径上的纵向,横向和垂直方向。SGS湍流涡粘度模型在控制方程中的应用如下:
图2.液体动力学模拟的坐标系和变量的定义
其中fr,i在符号上与第i个方向上的车辆的平移加速度相反。
作为(2)中mSGS的SGS湍流模型,标准斯莫-戈林斯基模型[13]的应用如下:
其中由其体积中的第三根来估计。被设置为0.15,这是简化汽车的比例模型的外部流程中验证的值[8]。fd由范迪瑞斯泰普解释阻尼功能如下:
2.2.2车辆动力学分析的控制方程
为了简化车辆动力学分析中的问题,限制车辆的垂直运动,并假定绕旋转中心的俯仰和横摆运动是静态平衡的。图3显示了车辆动力学分析的坐标系的定义。 如图3a所示,坐标系的原点固定在重心处,坐标轴由移动车辆的纵轴,横轴和水平轴定义。丸山和山崎[4]提出了一个类似的方程系统来验证小型车的车辆运动,尽管现在的系统已经扩展到一个有六个轮胎的车辆。
基于上述假设,车辆动力学分析的控制方程实现了横向,横向和偏航方向上运动车辆的运动方程,如下所示:
车身
(b)车轮
图3.车辆动力学仿真的坐标系和变量的定义
轮胎力与方向之间的关系如图3所示。如图3所示,前轮胎上的Fx,1j 和Fy,1j 可分别计算为Fx,1j = Fx1j cos- Fy1j sin和Fy,1j= Fx1jsin Fy1j cos。是通过驾驶员反应模型的转向系统的运动方程来计算的,其将在下面描述。 另一方面,中后轮胎的Fx,ij和Fy,ij分别等于Fxij和Fyij。
一般来说,Fyij和TSAT,ij取决于轮胎上的载荷以及车辆运动方向和轮胎之间的滑移角。Fxij取决于轮胎旋转和车辆运动之间的负载和速度比。考虑到这些相互的关系,采用的公式模型[14]来估计轮胎力和SAT。其模型系数由实验数据库确定。
考虑到卡车驶离目标路线时驾驶员的控制,采用吉本[15]提出的二阶可预测修正模型来确定驾驶员的转向行为。在此模型中,根据当前的位置,速度和加速度可预测一秒后车辆的未来位置。驾驶员的反应被认为是一个转向力Fd,它与可预测的航向偏差和比例因子Hr成正比: Fd = Hr。此外,为了表示人类反应的时间延迟,假设反应是离散的[15],并且以Tr秒的间隔评估转向力。
驾驶员的转向操作通过转向系统的旋转运动方程式影响前轮胎的转向角度,列出如下:
最后,前轮的转向角预测如下:
表格1
转向系统参数和人体反应模型
|
参数 |
数值 |
单位 |
|
机械 |
||
|
r |
0.24 |
米 |
|
n |
0.032 |
– |
|
I 全文共16189字,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[15595],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

