
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
1.Shpetim LAJQI, 2.Stanislav PEHAN, 3.Naser LAJQI,
4.Afrim GJELAJ, 5.Jože PScaron;ENIČNIK, 6.Sascaron;o EMIN
四轮驱动和四轮转向的地形车独立悬架机构设计
1,3,4.UNIVERSITY OF PRISHTINA, FACULTY OF MECHANICAL ENGINEERING, SUNNY HILL N.N., 10 000 PRISHTINA, KOSOV0
2.UNIVERSITY OF MARIBOR, FACULTY OF MECHANICAL ENGINEER-I
NG, SMETANOVA ULICA 17, 2 000 MARIBOR, SLOVENIA
5,6.RTC - AUTOMOTIVE RESEARCH amp; DEVELOPMENT CENTER, CESTA K TAMU 7, 2 000 MARIBOR, SLOVENIA
摘要:本文介绍了一种用于休闲的地形车,该车能够四轮驱动且能四轮转向。主要目的是设计一款能够满足稳定性,安全性和可操作性要求的悬挂机构。从以前到现在,车辆的悬架系统的快速发展已经显示出众多车辆的设计者和制造商对悬架的浓厚兴趣。研究的重点是对不同的可用独立悬架系统(麦弗逊式,双叉臂式,多连杆式)进行全面研究,从而设计开发一种方法来设计地形车辆悬架系统。为了找出最佳的设计,选择了几种悬挂系统进行详细分析。在制定悬架系统的过程中,应考虑设计约束条件和检查清单中提供的要求。之后,在已建立的二维工作模型和MATLAB环境中执行悬架机构运动学分析的仿真结果,对仿真结果进行详细的讨论,以期找到能够满足所设计的悬架系统需求的最佳解决方案。本文将会引用与该悬架系统相关的调查和评论,以便获得用于装备地形车辆的最佳悬架几何结构。
关键词:地形车辆,设计,悬架机构,悬架几何结构
背景介绍
车辆悬架系统的主要功能应该满足对稳定性,安全性和可操作性等必要要求。车辆的悬架系统执行多项任务,例如保持轮胎与路面之间的接触,保持车辆稳定性,以及在行驶于不平坦路面受到冲击时保护车辆底盘等[1]。悬架系统与轮胎,车轮,车架,悬挂连杆,轮毂,制动系统以及转向系统一起工作,以保证驾驶舒适性,稳定性等。
图1 在Pro/ENGINEER环境中建模的地形车辆设计
悬架系统是将车身与车轮进行物理结构性分离的机构。由于近年来汽车行业的持续发展,悬架系统的性能大大提高。如果能将车身与路面隔离,不受不平整道路的影响并且在转弯,制动和加速的情况下与惯性扰动相关,则该悬架系统将被认为是理想的。
车辆悬架系统在设计时针对前轴和后轴的情况可有所不同。(独立或非独立悬挂)[2]。这项研究的主要目的是为一种能够四轮驱动和四轮转向的休闲型地形车辆研发设计向匹配的悬挂系统。所设计的地形车主要用于崎岖地形以及铺设道路。地形车辆在Pro/ENGINEER环境中建模,如图1所示。
为了更好地满足项目中的要求,表1给出的清单中,罗列了在设计时所要遵循和用到的一些主要特征参数。
|
No. |
地形车主要特征参数 |
数值 |
单位 |
备注 |
|
1. |
发动机功率: Pe |
~4*103 |
kW |
上限 |
|
2. |
动力总成: |
机械式 |
按具体要求 |
|
|
3. |
行驶车速: v |
0 - 180 |
km/h |
上限 |
|
4. |
最大爬坡度: alpha; |
~ 50 |
deg |
预期 |
|
5. |
几何尺寸: 轴距:l 履带宽度:w 前轮距: lF 后轮距: lR |
2.80 2.10 1.40 1.40 |
m |
上限 |
|
6. |
车轮总质量: mtot |
1150 |
kg |
上限 |
|
7. |
前后车轮外形尺寸 直径: D 断面宽度: B |
0.80 0.25 |
m |
按具体要求 |
|
8. |
外倾角: gamma; |
~ 0 |
deg |
上限 |
|
9. |
悬架系统: |
独立悬架 |
按具体要求 |
|
|
10. |
车轮的垂直运动: 向下跳动量: zmin 正常位置: zrest 向上: zmax |
- 0.250 0 0.250 |
m |
按具体要求 |
为了更好地理解下文中的悬架设计过程,下面先讨论车辆悬架系统的分类和类型。
车辆悬架系统的分类
悬架系统总是源于某些机械设计方式。 一般来说,悬架系统的设计类型主要分为两大类[1,3]:非独立悬架系统(半轴为实心)和独立悬架系统。每种类型的悬架在功能上都可能有很大的不同,因此需要根据不同情况对其进行研究和讨论[3, 4]. 在汽车迅速发展的这些年,这两种悬架系统都发展迅速,均被普遍运用于普通车辆和商用车辆。
非独立悬架系统
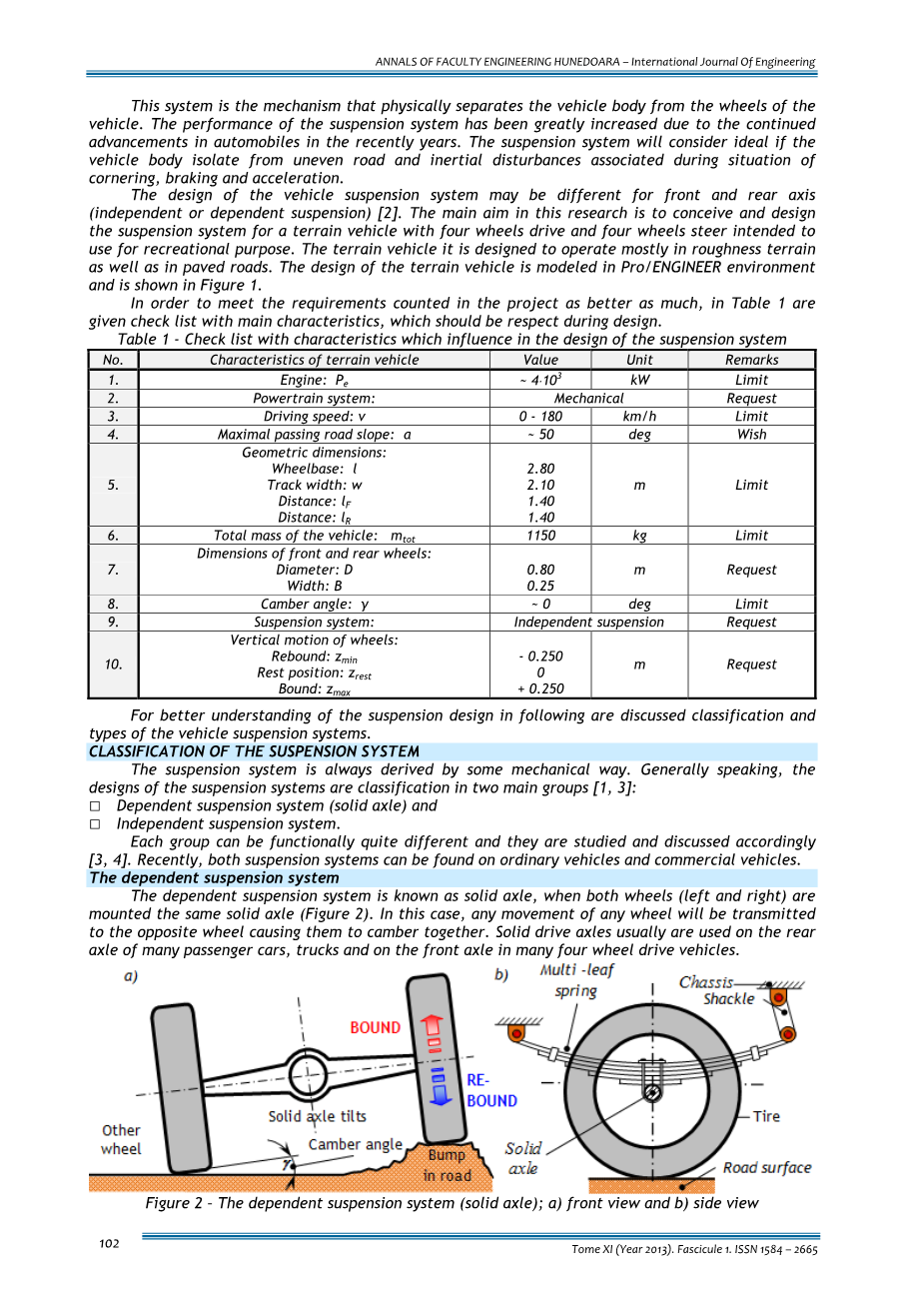
当两个车轮(左侧和右侧)安装在同一实心轴的两端时(图2),该非独立悬架系统称为实心梁式非独立悬架。 在这种情况下,两边任一车轮的任何运动都会传递到另一个车轮,从而导致它们在运动时一起发生变形。实心梁式车桥通常用于许多轿车,卡车的后桥,以及一些四轮驱动车辆的前桥。
图2——非独立悬挂系统(实心梁式); a)前视图和b)侧视图
实心轴的优点是轮胎的外倾角不受车体影响,轴在转弯时所产生的弯曲变形量很小,除非是由于转弯外侧的轮胎的稍大的压缩产生的弯曲。另外,左右车轮容易保持对齐,这有助于减少轮胎磨损。实心转向轴的缺点是它们易受摆振转向振动,质量大等的影响。大多数类型的整体式车车桥是:霍奇斯基车桥,四连杆车桥和德翁桥。
独立悬挂系统
图3 - 独立悬架系统(前视图)
独立悬挂系统中,当一个车轮上下移动时,另一个车轮所受到的影响很小(如图3所示)。大多数乘用车和轻型卡车在前桥使用独立悬挂系统,因为独立悬架较于非独立悬架,可以提供更多空间用于安装车辆发动机,给车轮提供更多的运动空间,也能很好的抑制转向系统转所产生的振动(摇摆和摆振)以及提高乘客的舒适性。独立悬架系统的缺点是,因为零部件较多,所以设计较为复杂,同时制造成本较非独立悬架高。
多年来随着悬架系统的发展,设计师们已经尝试研发出了许多类型的独立悬架系统,如麦弗逊式独立悬架,双横臂式独立悬架,多连杆式独立悬架,纵臂和摆臂式独立悬架。其中有许多因为不同的原因而被丢弃,秉承着最原始理念的麦弗逊式(也称滑柱连杆式),双叉臂和多连杆等悬挂系统,已经在许多类型的车辆中得到应用。
图4 独立悬架系统
a)麦弗逊悬挂系统 b)双叉臂悬挂系统 c)多连杆悬挂系统
麦弗逊式支柱由单个控制臂和支柱组件(弹簧和减震器)组成,可以使轮胎和车轮上下移动,如图4.a显示了该系统的主要组件。它可以用在前轴和后轴上。这种悬架系统设计可以减少零部件数量,降低非簧载质量以及提高驾驶时的平稳性和舒适性。
不得不说,麦弗逊式支柱是一种比较巧妙的折衷方案,既降低成本又能实现较好的行驶性能,但从性能或可调性方面来说,还比不上双叉臂或多连杆独立悬挂系统。此外,这种类型的悬架需要足够的垂直空间和坚固的顶部安装。
美国的双叉臂独立悬挂系统在英国通常被称为“双A臂”和“双叉臂”。双叉臂悬架系统多应用于豪华轿车和跑车,因为它们的弹性运动部件设计允许提供处理和舒适之间的最佳平衡[5]。双横臂使用两个横向控制臂,以防止车轮因悬架而倾斜(图4)。上部和下部控制臂通常长度不等,其英文名为short-long arm,常缩写为SLA(不等长臂)。在设计这种悬架时,如果想要获得良好的性能,则需要仔细改进悬架的几何形状[3,6]。
双叉臂独立悬挂系统有一些优点,例如,首先由于上臂和下臂的垂直运动而增加负外倾角,这保证了车辆的行驶稳定性能,因为负外倾角的增加使得外侧的轮胎在转弯期间能够与路面保持更好的接触。与麦弗逊支柱悬挂系统相比,双横臂的缺点在于设计复杂,生产成本增加,诸如接头和轴承等部件数量有所增加,这些部件的增加会导致橡胶套管等部件的损耗,从而加剧轮胎磨损。多连杆式悬挂系统也属于独立悬挂系统,从其结构来看,多连杆式悬架是通过双横臂的改进而衍生出来,且在汽车的前后轴上都有运用。多连杆式悬架一般由三个或三个以上的侧臂和一个或多个纵臂,且各连杆不需要等长[7](图4.c)。
从近年来的市场使用反馈来看,多连杆悬架系统似乎是最适合车辆的独立悬架系统,因为它在保持行驶稳定性和机动性的同时又能够提供很好的舒适性[7]。此外,与其他同类型的独立悬挂系统相比,这种悬架系统可以使车辆获得更好的性能,所以在地形车辆上加装此种悬架应该不失为一种好方法。当设计人员希望能够在不影响整个组件的情况下改变一个参数的时候,多连杆悬挂系统的优势便得以体现出来了,与双横臂悬架相比,这也是主要区别之一。多连杆独立悬架在具备以上所有优点的同时,也导致其设计更加复杂,制造成本更高。为了获得更好的车辆性能,应该通过相关合适软件,对悬架的几何形状进行仔细计算和校核。
上文中所描述的悬架系统的缺点,基本上都是它们不允许车轮的竖直移动以获得地形车辆的良好性能和特性。所以需要开发一种悬挂系统以克服这一缺点。
独立悬挂系统几何参数
一直以来,车辆的设计者和制造商都对悬架系统的开发表现出极大兴趣。 在开发过程中应考虑设计约束条件和要求(见表1),概念设计,各方面分析悬架运动学,机械系统结构的运动等。应当充分利用这些已经探索得到的与悬架设计相关的几何关系,以获得最佳的悬架几何参数,从而为地形车辆配备合适的悬架系统。
悬架的几何形状
悬架的几何形状是设计过程中的重要因素,这有助于我们确定车轮的垂直运动以及车轮在这种运动中的位置。悬架的几何形状不仅决定了车轮的路径,而且还决定了在弹簧和非弹簧质量之间传递的力。
对于地形车悬挂系统的设计,之前所述双叉臂独立悬架的模型,无论是装在前桥还是后桥都是差不多的。该模型已经在在之前和多连杆悬架独立系统一起讨论过。在设计过程中应该注意的一点是,悬挂机构的设计要能保证足够的车轮垂直运动的能力,以便车辆能够适应于各种粗糙路面。在轮胎行驶于颠簸路面并且悬架机构不允许足够的垂直运动的情况下,轮胎受到路面作用将继续向上移动,高速撞击车架,车架将振动传至驾驶员,并导致驾驶员产生大的垂直加速度。为避免此种情况,地形车将装备一个操控性强的悬挂系统,允许垂直车轮运动至少500毫米,其中各约250毫米的上下弹性运动空间(图5)。
图 5 – 悬架的运动; a) 向上跳动b) 向下跳动
图5是当车轮在垂直方向上上下跳动量达得最大值时的情况,相关重要的几何参数参数主要有:外倾角,主销倾角,主销偏置等。
外倾角,是指是从前方或后方观察到的车轮的垂直轴线和车辆的垂直轴线之间的角度。当车辆在不同的道路上行驶时,车轮会上下移动,并且车轮中心会发生改变,车轮中心变化,车轮的垂直轴线和车辆的垂直
全文共7876字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15590],资料为PDF文档或Word文档,PDF文档可免费转换为Word

