
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
关于四摆臂六履带机器人越障能力的研究
谢邵荣,包石龙,邹斌,朴华严,罗军,杰森顾
摘要:针对障碍物的机器人运动学特性,分析了具有四个独立摆臂的六履带机器人SHU-I的障碍物超越能力,并根据障碍物的机器人运动学特性分析了梯级攀爬和通道穿越等最佳障碍物的超越能力。对于本文的六履带机器人的四臂摆动机构,主要分析了其最大的爬楼障碍超越能力。以SHU-I履带式机器人样机为例,绘制了步高,仰角和摆臂摆角的三维关系图。分析了六履带机器人通道穿越能力与结构参数之间的关系。我们建立障碍超越的数学模型,也推导出了最优的障碍超越能力和相应的障碍姿态。然后我们使用recurdyn动力学软件进行模拟实验,以检验障碍物超越数学模型的有效性。本文将为障碍物超越过程中六履带机器人的质心位置控制提供理论依据。
关键词:六履带机器人,越障能力,数学模型,梯级攀爬,通道穿越recurdyn仿真
一、引言
移动机器人一般分为腿式机器人、轮式机器人、履带式机器人和轮式履带式混合机器人等。其中履带式机器人具有良好的越障能力和良好适应地面的能力,常用于救灾、核工业等领域。履带式机器人已经广泛应用于复杂非结构化环境中。典型履带式机器人可分为固定双履带机器人、双摆臂四履带机器人和四摆臂六履带机器人。随着多履带机器人的摆臂越来越多,多履带机器人可以容纳更复杂的地形。伴随经济的发展,多履带机器人尤其是四摆臂六履带机器人的研究越来越受到重视。 A. Kalantari [1] [2] [3]设计并制造了一款名为Silver的移动式救援机器人,这是一种带有四个摆臂的六履带机器人,并且他们开发了一种新的特殊机制来增强移动机器人在尝试时的机动能力以保持其尺寸与其执行的环境相关。 Eric Rohmer,T. Yoshida [4] [5]设计并制造了一种带有四个摆臂的六履带机器人,名为Quince。包围Quince整个身体的两个主要爬行器能避免其在移动时被踩在一个台阶的杆子上。 Quince的四个独立子爬行器允许根据环境进行调整并增加更多抓取力量。它们还可防止机器人在越过较大间隙或爬楼梯时摔倒并延长机器人的长度。许多研究人员已经研究了移动机器人的运动特性及其稳定性。 J.G. Xing [6]分析了不同地形下腿式履带式混合动力机器人的障碍物超越能力。 R.G.Xu [7]分析了六履带机器人结构参数与克服障碍性能之间的关系,但他没有验证结果。 K. Nagatani [8] [9]采用自主控制活动鳍状肢的方式,在不平坦地形上为半挂车提供半自动行驶。
目前,对四摆臂六履带机器人越障性能的研究相对较少,不够完善。而对四摆臂六履带机器人越障能力的研究有利于机器人越障操作与控制。
本文针对基于障碍物越障机制的运动学视角,对具有四个摆臂的六履带机器人(包括台阶和通道穿越)进行障碍物超越能力的分析, 带四个摆臂的六履带机器人。 建立障碍超越数学模型,推导出最优障碍超越能力及相应的障碍姿态。 以SHU-I型履带式机器人样机为例,绘制了台阶高度,仰角和手臂摆动角三维关系图,分析了机器人通道穿越能力与结构参数之间的关系。 然后,我们使用recurdyn动力学软件进行模拟实验,以检查障碍物超越数学模型的有效性。
二、SHU-I及其参数
SHU-I是一款带有四个摆臂的六履带机器人,旨在解决不平坦的地形,特别是楼梯台阶,步行场地和瓦砾。 它的高度机动性是通过其机械设计实现的。 它主要由一个完整的防水机体履带,四个自主子履带,重心低和强大的无刷直流电机组成。 封闭SHU-I(图1)整个车身的两个主要履带因摩擦力较大而增加牵引力。 他们也避免被踩在台阶上的杆子上。 他们的橡胶带胎面花纹,设计使其具有很好的抓地力,攀爬和旋转性能。 SHU-I的四个独立子爬行器可以适应环境并增加更强的抓地力,特别是在爬楼梯时。 它们还可防止机器人在越过较大间隙或爬楼梯时摔倒并延长机器人的长度。 SHU-I的相关参数总结在表一中。
图1. SHU-I的设计:SHU-I是一个四摇臂六履带机器人
L₀,两个主轮轨道中心之间的距离O ₂O ₃
L ₁ ,机身质心G₁与主轮中心O ₃之间的距离;
L ₃,摆动臂质心与主轮中心之间的距离;
G,机器人质心 alpha;,O ₃ G₁ 和 O ₃O ₂之间的交角
R₁ ,主轮的半径 R₂,前摆臂轮的半径; R₁ R₂,包括他们的履带厚度。 m₁,机器人的身体质量。 m ₂,摆臂的质量。
表一 SHU-I的相关参数
|
S符号 |
V数值 |
S符号 |
V数值 |
|
L₀/mm |
5550 |
/ L ₁/mm |
2280 |
|
/ L ₂ /mm |
2200 |
/ L ₃/mm |
885 |
|
/ R₁/mm |
880 |
/ R₂/mm |
880 |
|
/alpha;/rad |
00.2793 |
/ m₁/kg |
118 |
|
/ m ₂/kg |
2 |
BB/mm |
5510 |
三、机器人的质心分布
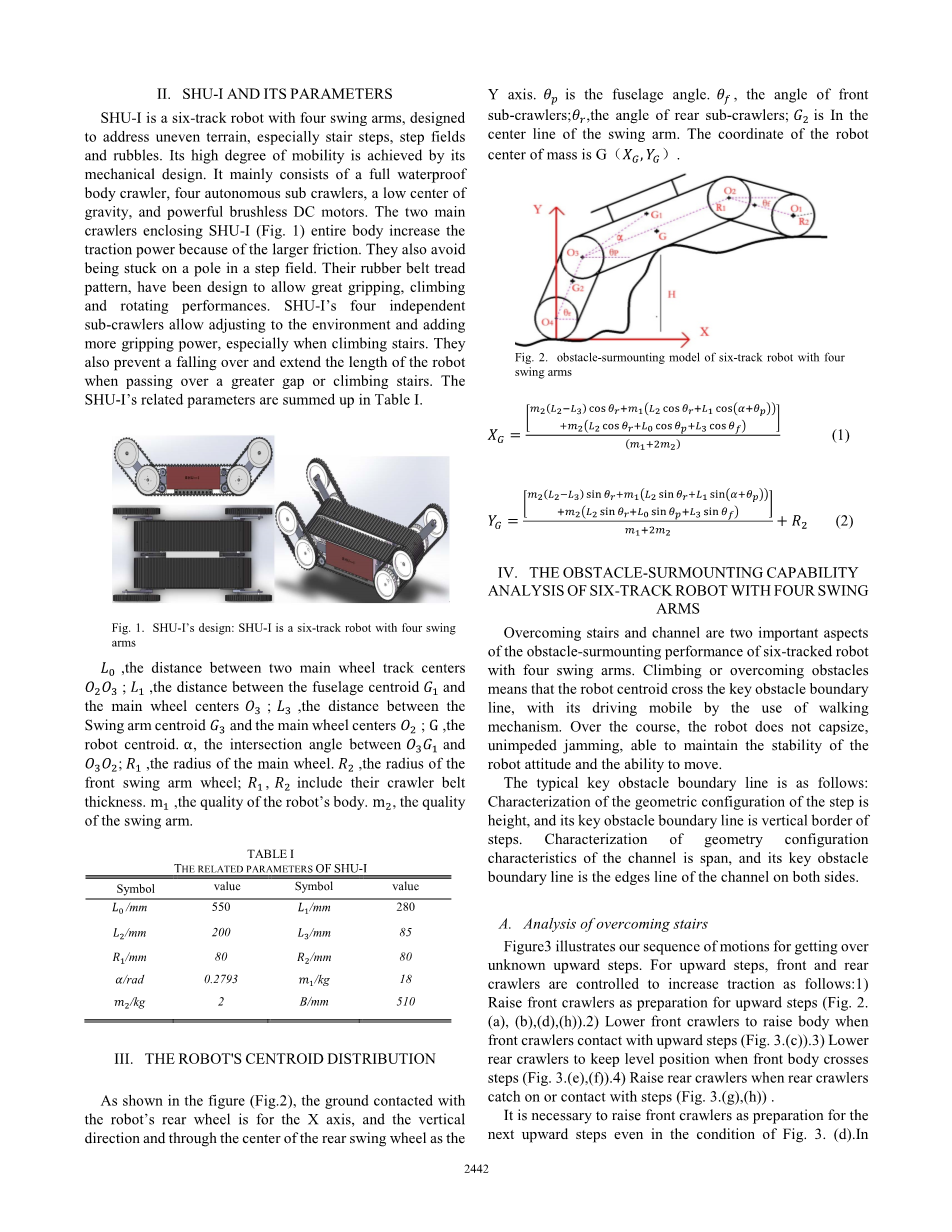
如图(图2)所示,与机器人后轮接触的地面为X轴,垂直方向和后
图2.四摆臂的六履带机器人的障碍物超越模型
摆轮的中心为Y轴。theta;p 是机身角度。theta;f ,前部分爬行器的角度; theta;r,后部爬行器的角度; G ₂在摆臂的中心线上。 机器人质心坐标为G(Xg,Xg)。
四、具有四摆臂六履带机器人越障能力的分析
克服楼梯和通道是六履带机器人具有四个摆臂的障碍超越性能的两个重要方面。 攀登或克服障碍物意味着机器人质心穿越关键障碍物边界线,并通过使用步行机制驱动其移动。 而在整个过程中,机器人不会倾覆,畅通无阻,能够保持机器人姿态的稳定性和移动能力。典型的关键障碍边界线如下:台阶的几何结构特征是高度,其关键障碍边界线是台阶的垂直边界。 通道的几何配置特征的表征是跨度,其关键障碍边界线是通道两侧的边缘线。
A克服楼梯的分析
图3说明了我们为了克服未知的向上步骤而运动的序列。 对于向上的步骤,控制前后爬行器以增加牵引力,如下所示:1)抬起前爬行器作为向上步骤的准备(图2.(a),(b),(d),(h))2) (图3(c))3)当前身穿过台阶时,降低后部履带以保持水平位置(图3(e),(f)) .4)当后部爬行器接触或接触台阶时抬起后部履带(图3(g),(h))。(d)。在图3的情况下,需要提前爬行器作为下一个向上步骤的准备。 (c),降低后履带保持水平位置,这可以利用摩擦力并防止前倾。
图3. SHU-I为了克服未知的向上步骤而运动的顺序
具有四摆臂的六履带机器人成功跨越最高一步的过程具有以下限制:
综合方程(1) - (4),我们可以推导出最高的障碍物超越能力函数Hmax(theta;r,theta;p)如下
综合式(5) - (7),存在最大障碍物超越高度,其最大值与机器人的结构参数和机器人的障碍物超越姿态密切相关。当前臂的角度值为零时,最大障碍物超越能力函数Hmax(theta;r,theta;p)可以具有最大值。 SHU-I的相关结构参数如表1所示,设置Hmax(theta;r,theta;p)的函数Hmax(theta;r,theta;p),参数和三维图,在matlab中获得。从图中可以看出,机器人的障碍物超越高度与前臂角度(theta;r)的趋势呈正相关,随着数据的增加先增大后减小,从而得到最大值。机器人的障碍物超越高度也与机身角度(theta;p)的趋势呈正相关,并且随着数据的增加先增加后减小,从而得到最大值。这些结果表明,调整机器人的前臂水平状态和后臂垂直状态有利于机器人的障碍物超越。当part; H / part; theta;r =0,part; H / part; theta;p =0,和part; sup2;H / part; theta;r sup2;lt; 0,part; sup2;H / part; theta;p sup2; lt;0时,我们可以得到最大障碍物超越高度Hmax(0.9594,1.57) = 390.12(图4)
图4.越障高度、俯仰角和两臂摆角的三维关系图
图5.不同臂长的障碍物超越高度图
最大障碍物超越高度也与机器人结构参数有关。 该图显示不同的机器人结构参数具有不同的最大障碍物超越高度。 当L0 = 550,L2 = 500时,我们可以得到最大障碍超越高度Hmax(1.0903,1.57) = 841.0009。 当L0 = 550,L2 = 275时,我们可以得到最大障碍超越高度Hmax(1.0467,1.57) = 613.1697。 (图5)
B.通道穿越能力分析
图6.四摆臂六履带机器人的通道穿越过程
通过对双履带机器人的分析(图6),我们发现机器人手臂平躺时机器人的角度(theta;p)为零时机器人穿越通道是有帮助的。 如图1所示,机器人的前通道穿越能力函数为Lf=( L ₂sup2;-Delta;Rsup2;)frac12;-L ₁cosalpha; L₀。
如图2所示,机器人的后方通道穿越能力函数为Lr=( L ₂sup2;-Delta;Rsup2;)frac12; L ₁cosalpha;;Delta;R=R ₂-R₁。
通道穿越的最大宽度是Lmax=MIN(Lf,Lr)
Lmax与机器人的结构参数有关。 理论上讲,当机器人的重心在垂直重心上达到时,前后轮的直径相等,机器人在通道上的性能最好。 SHU-I在通道上的最佳性能是Lmax=469mm。
图7. SHU-I的Recurdyn模拟分析
五、SHU-I的RECURDYN模拟分析
图8. SHU-I的模拟测试结果
在recurdyn中创建SHU-I模型是一个动态分析软件,我们定义轨道与地面的接触是硬路面接触。对于仿真,两个前部分履带臂采用相同的驱动,两个后部分履带臂采用相同的驱动,为了验证障碍物的最大高度,我们增加了三种类型的障碍垂直高度(375毫米,385毫米,395毫米)。坐标系的方向与图8中的坐标系相同。SHU-I成功克服了阶梯(375毫米)并且稳定平滑(时间为4.0-4.8。 8(a))。 SHU-I也成功地克服了楼梯(385毫米),但它不稳定和振荡(时间= 4.0-4.8,图8(b)),这表明机器人克服楼梯障碍物更困难,但仍然能够穿过楼梯。 SHU-I爬楼梯(时间= 4.0-6.0图8(c))时无法克服楼梯(395毫米)并向下滚动。最大障碍物超越高度在385mm和395mm之间,因此模拟结果的高度与理论计算结果一致。
六、结论
我们根据六履带机器人四臂摆动的结构和运动学特性,分析了SHU-I在障碍物超越能力方面的最佳障碍物超越能力,包括跨越和通道穿越能力。以SHU-I履带式机器人原型为例,建立超越障碍物的数学模型,推导出最优障碍物超越能力和相应的障碍物姿态,并绘制了台阶高度,仰角和手臂摆动角度的三维关系图。通过分析了SHU-I的通道能力与结构参数之间的关系,获得了样机最大障碍物超越能力的理论值。当前臂的角度值为零时,机器人具有最高的障碍物超越能力。我们发现机器人手臂平放对整个通道的机器人很有帮助。理论上,当机器人的重心在垂直重心和前轮和后轮的相等直径处相遇时,机器人具有最佳的通道穿越能力。最后,我们使用recurdyn动力学软件进行模拟实验,并与数学模型的理论计算结果进行比较。模拟结果的最大障碍物超越高度与理论计算结果一致。本文将为障碍物超越过程中的质心位置控制提供理论依据。
参考文献
[1] E. Mihankhah,A. Kalantari,E. Aboosaeedan,HD Taghirad,S. Ali,A. Moosavian,“Autonomous staircase detection and stair climbing for a tracked mobile robot using fuzzy controller”,Proceedings of the 2008 IEEE国际机器人与仿生学会议,泰国曼谷,2009年,第1980-1985页。
[2] SAA Moosavian,H. Semsarilar,A. Kalantari,“移动救援机器人的设计与制造”,2006年IEEE / RSJ国际智能机器人与系统会议论文集,中国北京,2006年,第3982页-3987。
[3] SAA Moosavian,A. Kalantari,2008年IEEE / RSJ国际智能机
全文共5933字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15219],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

