英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
附录A外文译文
可大范围调光驱动的双向可控硅调光
摘要
LED白炽灯如今变得越来越受欢迎,因为它们比起传统的白炽灯消耗更少的电能。为了使白炽灯达到最大的兼容性,除了提供相同的光源输出和质量,还希望能够使得基于双向可控硅的标准调光器具有可操作性。然而,LED白炽灯在调光时的电流比双向可控硅的稳定电流低,这会导致调光范围受到限制以及会产生灯光闪烁现象。本文介绍了一种能够允许大范围调光的双向可控硅LED灯。因为这一概念基于控制输入的无功功率,所以虽然LED阵列电源是可以操控的,但是输入电流增加到一个高于可控硅当前稳定电流的值。驱动程序分为两个电源转换阶段,包括四象限交流 — — 直流转换器,用于提供输入电流,以及调节输出功率的 LED 谐振变换器数组。两个转换器共享相同的开关网络。我们将具体讨论建模,分析和设计驱动程序。我们已经对LED原型进行了建立和评价。实验结果显示双向可控硅的真正的触发角度可以下调至172◦,灯功率可以从7.2W线性调至0.3W。
关键词:全桥式接线法, LED驱动电路, 谐振转换器, 双向可控硅调光器
一.简介
随着固态照明技术近几年的发展,LED替换白炽灯正快速用于一般的照明,因为它们和传统白炽灯相比有更高的发光效率以及更长的寿命。为了使其完全兼容,我们希望LED灯的可操作特性能够和白炽灯相似或优于白炽灯。其中,已经有很多在双向可控硅调光器的 LED 灯的兼容性方面的研究,因为许多双向可控硅调光器已经被运用于很多领域,最初用于控制白炽灯。然而,想使LED灯能够有更加大范围的调光仍然很困难。主要的原因是由于过低的LED输入电流以及可控硅过高或是不同数量级的持续电流。实际上,可控硅的当前持续电流范围从 20 到 80 mA,而输入电流可以小于 60 mA,这将会影响双向可控硅调光器的 LED 灯的兼容性。对于相同的亮度,LED灯的输入电流只有白炽灯的十分之一,并且它的放大倍数太小以至于无法在双向可控硅锁存后导通状态下维持可控硅。因此,现有的可控硅调光LED 灯驱动程序不能提供一个非常宽的调光范围。例如,我们[2][3]提出使用带有初级侧调节控制LED电流的反激转换器的15WLED灯。可调整的调光范围在35度到150度之间。在[4]中,我们将提出一个带有初级侧调节方法的有源阻尼器电路。正如和被动阻尼器电路相比,它提供了足以导通的输入电流以及更小的功率消耗,来锁存导通状态。然而,调光范围内持续电流的影响仍未得到解决。最大调光范围大致在130度左右。因此,如果灰色功率级进一步减少将会受到更大的影响。
图1.基于可控硅调光的典型电路
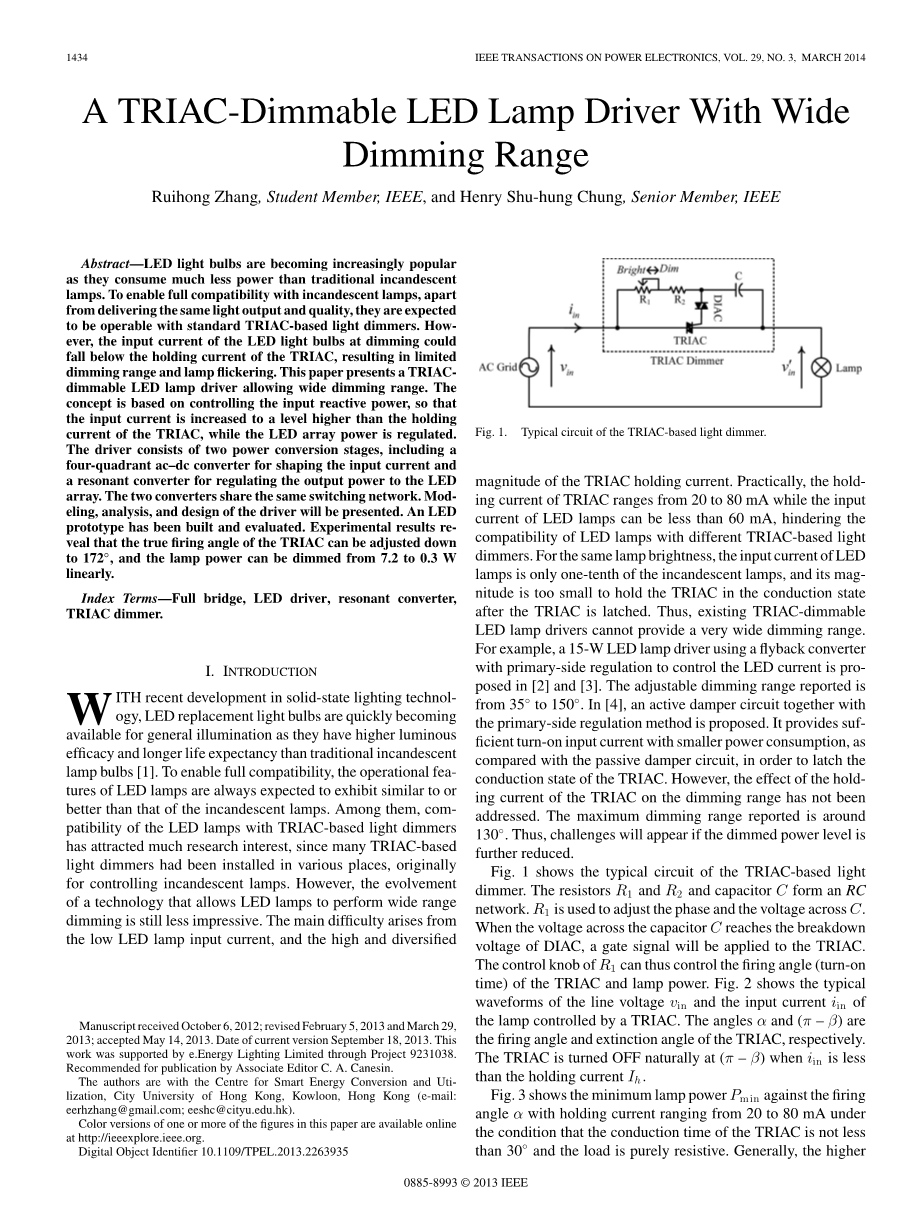
图1为基于双向可控硅的调光器的典型电路。电阻器 R1 和 R2 和电容 C 组成电阻网络。电阻1用于调整电容C的相位和电压。当电容C上的电压达到双向触发二极管的击穿电压时,将在双向可控硅上加一个门信号。R1 的控制旋钮因而可以控制双向可控硅和功率的触发角度(导通时间)。图2显示了由双向可控硅控制的LED灯的线性输入电流和电压的典型波形。角度alpha; and (pi; – beta;) 分别对应可控硅的触发角度和消光角。当输入电流小于持续电流Ih时,双向可控硅将自动在(pi; – beta;)角度时关闭。
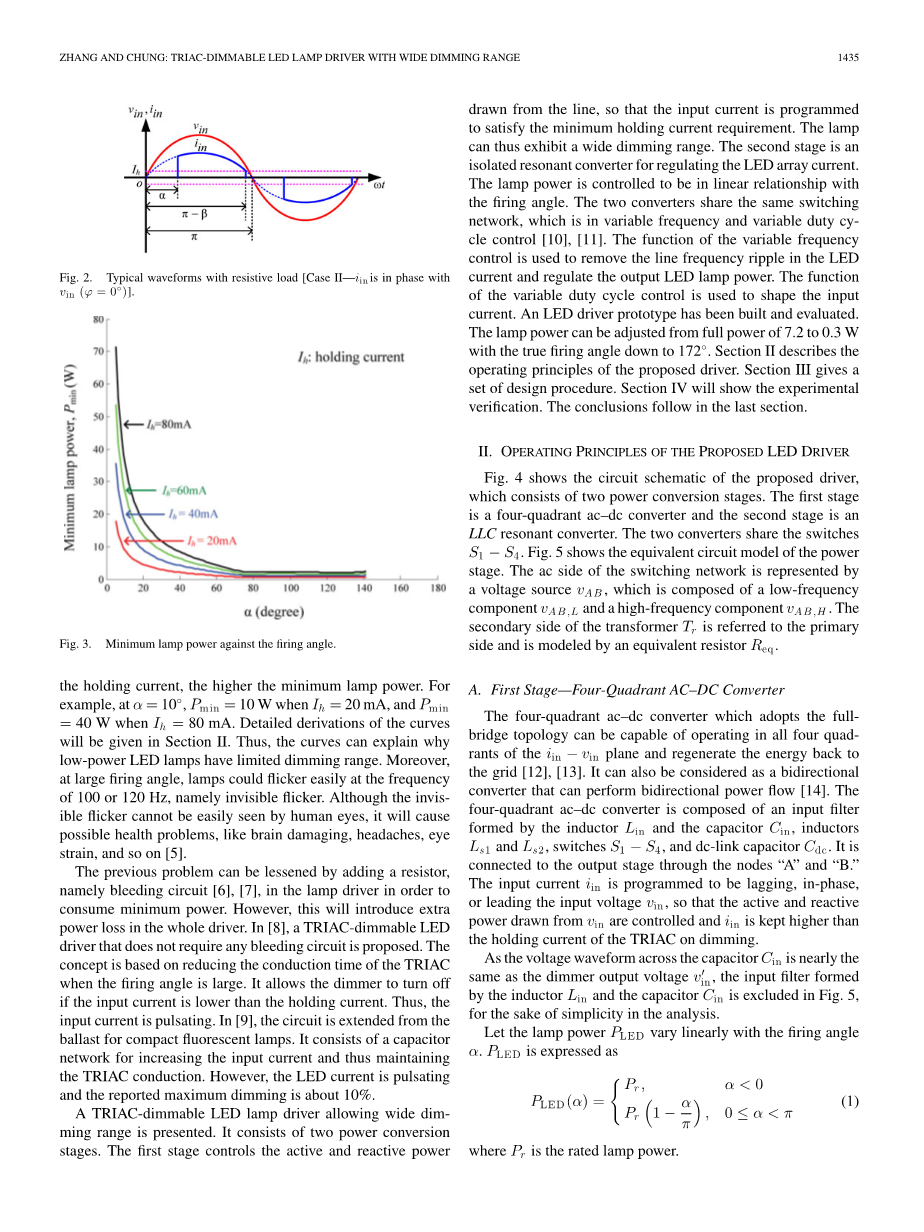
图3显示了在双向可控硅的导通时间不少于30度同时负载为纯电阻时,针对触发角alpha;的最小LED灯功率,持续电流从20-80mA。一般来说,持续电流越高,其最小功率也越大。例如, alpha; = 10◦, 当Pmin = 10W ,Ih = 20 mA, 当Pmin= 40 W ,Ih = 80 mA.详细的推导曲线将在第二节给出。因此,这条曲线能解释为什么低功耗 LED 灯调光范围很窄。此外,触发角较大时,灯会更容易在100或120HZ闪烁,就是无形的闪烁。尽管无形的闪烁不容易被人眼捕捉,但是这会对人的健康造成威胁,如脑损害、头痛、眼疲劳,等等 [5]。
图2.带有电阻负载的典型波形(第二种情况下——输入电流和输入电压同相变化(ϕ = 0◦))
图3.触发角度下的最小功率
前面的问题可以通过添加一个电阻缓解,也就是泄放电路,[6][7],使得消耗的功率最小。然而,这将会在整个驱动电路中引起额外的功率损耗。在[8]中,我们将提出不需要任何泄放电路的双向可控硅LED驱动电路。这个概念是在触发角很大时减少其导通时间的基础之上提出的。当输入电流小于持续电流时,调光器将会关闭。因此,输入电流是变动的。在[9]中,我们将镇流器扩展的电路用来使荧光灯变得紧凑。它是由一个电容器组成,用来增加输入电流从而维持双向可控硅的导通。然而,LED的电路是变动的,最大亮度降低程度约为10%。
接下来将给出双向可控硅调光 LED 灯驱动程序允许调光的范围。它包含两个电源转换阶段。第一阶段是线性控制有功和无功功率,从而使输入电流能够满足最小持续调光的范围。第二阶段是使用独立谐振变换器来调节LED阵列电流。LED灯的功率需要和触发角成线性关系。两个转换器共享同一个变频调速和可变占空比控制的开关网络[10][11].可变频率控制用来解决LED电流产生的线性频率脉动并且调节LED 灯的输出功率。可变占空比控制用来形成输入电流。我们已经建立并且评估了LED驱动电路模型。随着真正的触发角降低到172度,灯的功率可以从7.2W调整至0.3W。第二节描述了所给驱动电路的操作原理。第三节给出了一系列的设计流程。第四节将给出实验论证。所得结论将在最后一部分给出。
二.LED 驱动的操作原理
图4显示的是该驱动电路的电路示意图,包括两个电源转换阶段,第一阶段是一个四象限交流 — — 直流转换器和第二阶段是LLC 谐振变换器。两个转换器共享交换机s1-s4。图5显示的是电源阶段的等效电路模型。交流侧的交换网络由电压源VAB表示,它由低频组件VAB,L以及高频组件VAB,H组成。变压器Tr的二次侧指的是主侧边,以等效电阻Req建立模型。
图4.所提出的可控硅调光 LED 驱动电路原理图
图5.功率放大器的等效电路模型
- 第一阶段—四象限交流—直流转换器
采用全桥拓扑结构的四象限交流—直流转换器能够在输入电流输入电压平面的所有四个象限操作,并能再生能量返回给网络[12][13]。它也可以被视为一种双向转换器,可以执行双向功率流[14]。四象限交流—直流转换器由输入滤波器组成,滤波器由一个电感器Lin和电容器Cin,电感器LS1和LS2,开关S1-S4 和直流母线电容Cdc组成。它通过节点A和B连接输出级。输入电流iin被设计成滞后,同向,或者超前于输入电压Vin,以便于控制来自Vin的有功和无功功率,同时iin在调光时,保持其值比可控硅的持续电流高。
由于电容器Cin附近的电压波形几近和调光器输出电压Vin相同,为了分析方便,在图5中,我们将不考虑由电感Lin和电容Cin组成的输入滤波器。
白炽灯的功率PLED随着触发角alpha;线性变化,表示为:
其中Pr称为白炽灯的额定功率。
电压vin , vin ,以及iin表示为:
Vm和Im分别是输入电压Vin和输入电流iin的幅值,w是角线频率,phi;是Vin和iin的相位差。有三种可能的操作情况。情况一:iin先于vin,情况2:iin和vin同相位,情况3:iin滞后于vin,这三种情况分别在图6,2,7中诠释。情况1发生于alpha;很小的时候。不同的可控硅持续电压对应不同的Alpha;,可以是负的,0,或者正的。它们的波形在图6(a)-(c)中显示。情况3发生于alpha;很大的时候。因为beta;的工作点是不独立的,所以在情况3中会出现三种可能的方案,包括ϕ lt; beta;,ϕ = beta;, andϕ gt; beta;。它们的波形是分别对应图 7(a)–(c) 。
三种情况下的平均输入有功功率Pavg的表达式如下:
考虑临界状态:在消光角处的输入电流等于Ih:
为了确保稳定运行,输入电流iin在可控硅导通时间内应当不低于Ih.因此,根据公式(4)知道当可控硅在omega;t =alpha;时开启。
将(6)代入(7)得到:
我们可以通过公式(5)和(6)获取图3中的曲线,当 pi;/36 le; alpha; le; 5pi;/12,时,设置ϕ = 0, beta; = alpha;,当 5pi;/12 le; alpha; lt; pi;时,设置 ϕ= 0, beta; = alpha; pi;/ 6 。
接着,我们假设系统的效率为100%,Pavg =PLED.把式子(1)(6)带人(5)
图6.情况1——输入电流先于输入电压(ϕ lt; 0◦). (a)alpha; lt; 0◦. (b) alpha; = 0◦. (c)alpha; gt; 0◦.
图7.情况3——输入电流滞后输入电压(ϕ gt; 0◦). (a)ϕ lt; beta;. (b) ϕ = beta;. (c)ϕ gt; beta;.
输入电压Vin的均方根值Vrms为:
输入电流iin的均方根值为lrms:
显示输入功率S为:
输入功率因子如下:
等式(13)给出了在能够满足(9)中的所需功率大小的不同alpha;、 beta;和phi;值下的输入功率系数。因此,可以最大化 PF ,图 8可以通过改变 phi;的值来使得PF的值达到最大。图(8)描绘了在不同的alpha;值下,Ih从20-80mA变化时可获得的最大功率系数,以及在此最大功率系数下的phi;所需的值。表I给出了分析使用的参数,其中额定功率为7.2W。然而,如图8所示,相移Phi; 不得不随 alpha; 和 Ih变化。这是不可行的,因为可控硅的持续电流很难确定。因此,如图8,当持续电流为80mA 时,我们通过使ϕ–alpha;的曲线成线性变化得到alpha; 和Phi;之间的固定关系。如图9所示,这是图8 中所有情况中最坏的情况。也就是说,LED驱动电路在可控硅的持续电流小于80mA的情况下能够正常运行。当alpha;lt;0,phi; 是常数,等于相移直到alpha;= 0。当 0le;alpha;lt;alpha;1,phi;是负的,并且随alpha;线性减小。当alpha;1 lt;alpha;lt;alpha;2,phi;是正的,并且随着 alpha; 呈线性增加。当 alpha;2lt;alpha;lt; 172◦,phi;是正的,并且随alpha;线性减小。在最大持续电流下(Ih=80mA),其中phi;=0,此时phi;为分别使得iin滞后于vind的最大值,考虑到图8中的PF — — alpha;曲线,我们选择alpha;1 和alpha;2 。在图9中令alpha;1 =60◦ alpha;2 = 105◦ 尽管简化相移控制下功率系数和最大可实现功率系数相差不大,但这在实际操作中仍然能接受。
图10显示了VABd的波形。根据图5所示,等效电感Ls=Ls1 Ls2上的电压为VLs
图5中的VAB,H在以下的分析中忽略不计,因为Ls的高频阻抗过大。因此,考虑到VAB的低频分量VAB,L
d (t)是S1和S2的占空比。因此S2和S3的占空比等于1-d(t).
将其代入KVL得到:
将(17)代入(16)中得到d(t)
这里
根据(18),最大和最小占空比分别为dmin和dmax:
图11的(a)-(d)表明了d(t)在一个线性周期中的变化,alpha;分别为0◦, 45◦, 90◦,和 145◦。
图8.在所需相移的触发角度下可获得的最大功率系数
表1.原型规格
图9.最简相移控制下的触发角度下的实际功率系数
图10.VAB的波形
图11.不同触发角度下d(t)在一个线性周期内的变化(a) alpha; =
0◦. (b) alpha; = 45◦. (c) alpha; = 90◦. (d) alpha; = 145◦.
B.第二阶段 — — LLC 谐振转换器
LLC 谐振转换器由开关S1 minus; S4,电感Lr,电容 Cr,变压器 Tr,输出滤波器,和 LED 阵列组成。谐振的路径由 Lr,磁化电感 Tr ,变压器 Lm以及电容Cr组成。LLC谐振转换器比起正常的谐振转换器有很多的优点,它可以通过零电压开关和相对较小的开关变换频率,在大范围的输入下调节输出和负载范围 [15] [16]。如(18)中所示,开关的占空比随频率变化。因为Cr 的阻抗很高,所以图 5 中的 L,vAB 对输出几乎没有影响。因此,只有当vAB为高频分量时,我们在下面的讨论v中才会考虑AB,H 。令 Kv 为rms 等于 Req的电压值vR,(| vR |),和 vAB,H (| vAB,H |)的比。参见图 5。
是的质量因素,是特性阻抗,中 fs 是开关频率,是角谐振频率。
图 12 显示了 Kv 和 omega;s/omega;r 与之间在Qa
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[483971],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

