英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
设计(论文)题目: 基于最小二乘支持向量机的船舶航向跟踪控制
2018年3月9日
目录
摘要 1
1.介绍 2
2.船只模型的描述 3
2.1四自由度数学模型 4
2.2.方向舵液压机械 5
3.频域系统识别程序 6
3.1.时域数据收集和数据处理 6
3.2.频谱分析 8
3.3.传递函数建模 9
3.4.时域验证 9
3.5.识别过程的结果 10
4.海洋导航,导航和控制系统 13
4.1.PID航向控制器 14
4.2.自动驾驶观察器模型 15
4.3.控制器和观察者在波场中的评估 18
5.结论和结束语 20
摘要
本文提出了应用频域-系统辨识方法进行辨识。使用元数据分析软件调用动力学分析软件,称为CIFER。 更高级的特性,诸如Chirp-Z转换和复合窗口优化等被用于提取高质量的频率响应。针对偏航推导出准确,鲁棒和线性的传递函数模型和船只的滚动动态。
评估模型的准确性,时间域的响应。从45-45锯齿形测量结果与通过识别模型预测的响应进行比较确定的模型表现出良好的预测能力和适合的模拟和控制器设计。 因此,根据识别出的线性模型,一个PID航向控制器卡尔曼滤波器。观察员构建了与柴油机动力相关的参数和过滤干扰的预测模型结果显示了对于波动诱发情绪和力量的情境下的驾驶员输入的优异追踪。
1.介绍
系统识别是通过测量其输入和输出来了解系统数学模型结构的过程。 船舶转向领域已广泛应用各种系统识别方法。 船舶转向的动力学在评估机动性时很有用,而且在设计自动驾驶仪,导航和转向系统时是必要的。 船舶的高度非线性行为是由向心和科里奥利加速度的影响,船体与其周围流体之间的相互作用以及波浪效应(Khaled,2010)造成的。 此外,诸如方向舵之类的控制装置与船舶动力学非线性耦合,这增加了识别问题的复杂性。
为了识别海洋表面船舶的转向动力学,传统上通过理论计算或通过使用昂贵和少量测试设备(拖曳箱,旋转臂和平面运动机构)的比例模型实验来确定。 鉴定方法通常将实验简单化以达到必要计算效率(Kauml;llstrouml;m和Aring;strouml;m,1981)。 它们还通过记录船舶对舵角变化的反应,提供了另一种确定船舶转向动力学的方法。 船舶动力学的输入信号(这里是舵角)必须在频率上足够丰富,以激发船只的所有感兴趣的模式。具有上述特征的良好输入信号可以成为一个频率扫描。
在识别船舶动力学方面,Kauml;llstrouml;m和Aring;strouml;m(1981)对各种船舶采用了递归最大似然估计。 Van Amerongen(1982)使用间接模型参考自适应方法进行识别,当模型的输入是恒定的。 Holzhuter(1989)应用递归最小二乘估计方法。 Haddara和Wang(1999)应用神经网络方法预测了船舶的水动力参数。 为了克服神经网络参数估计方法的缺陷,Zhang和Zou(2011)提出了支持向量回归方法来识别Abkowitz模型中的流体力学导数。 Selvam等人 (2004)使用频谱分析方法来确定船舶的线性转向动力学。
以前的大部分工作都试图解决船舶参数估计问题,而不是提供参数系统识别的逐步过程。 参数化系统识别方法着重于对所识别系统的物理理解。 他们可以推荐系统订单来捕捉其关键动态。 另外,如果可能的话,它们可以确定模式之间的耦合程度以及系统非线性程度,以便于应用线性控制方法。
在本文中,进行全面的频谱分析以确定巡逻船的转向动态。这里描述的并且在CIFER软件包中实施的光谱分析的两个关键特征是Chrip-z变换和复合窗口优化(Tischler和Remple,2006)。Chrip-z变换是一种先进而灵活的FFT算法,可在感兴趣的频率范围内提供准确的频率响应。频谱窗口是时间历史数据被分段的一个过程,并且为每个段或窗口确定频率响应。通过平均来自各个窗口段的频率响应,噪声的影响显着降低。在复合窗口中,通过改变窗口长度来执行重复的频率响应确定,然后使用数值优化程序将这些结果组合成单个结果。Chrip-z变换和复合窗口优化方法一起产生一个频率响应数据库,该数据库在真实测试数据的宽动态范围内具有极高的精度和分辨率。这种分析的一个重要副产品是相干函数,它提供了关于频率响应精度和模型线性度的关键信息。
转向动态的传递函数建模是系统识别过程的下一步。传递函数增益,极点和零点位置的值通过数字确定,以提供频率响应数据的最佳匹配(以最小二乘方式)。在本文中,选择一阶Nomoto模型(Nomoto等,1957),并用所提出的方法确定其常数。频域识别过程的最后阶段是对模型的验证(Vanreusel,2005)。这通过(1)使用用于模型验证的相同识别输入(即,频率响应方法的频率扫描)来检查所识别和模拟的模型之间的可能的时域失配以及(2)执行45-45zig-用平静的水中的识别和模拟模型进行zag测试,以确保所识别模型对其他形式输入的稳健性。所提出的识别方法可用于通过输入/输出传感和数据记录设备来识别仿真环境中的完整船舶动力学以及真实应用。
识别过程完成后,需要设计一个用于船舶航向控制的自动驾驶仪。这是通过根据Nomoto常数计算PID控制器增益来完成的。此后,参考模型和前馈术语将被添加到控制器中,以实现更加准确和快速的路线改变机动。最后一步是设计卡尔曼滤波器。海洋车辆的总运动可以被认为是低频运动(发生在平静水面)和零均值振荡波频运动的叠加。仅对低频运动的控制是通过对来自位置和航向测量以及估计速度的波频分量进行适当滤波来实现的。在信号传递到控制器之前执行此过滤。大多数船舶只有罗盘测量,因此必须估算转折率。此外,有必要进行滤波,以避免反馈回路中振荡波引起的运动。这将通过基于所识别的船的Nomoto模型的卡尔曼滤波器来执行。
在简要介绍之后,本文的其余部分组织如下:在第2节中,介绍了四自由度船只模型。 在第3节中,频域识别过程针对的是基于Nomoto模型的船舶模型转向动力学。 第4节介绍了PID控制器和卡尔曼滤波器估计的仿真结果以及关于设计过程的一些讨论,接下来是第5节的结论。
2.船舶模型描述
文献中通常难以找到详细的海洋船舶导航和控制数学模型。 由于保密问题,这些模型很少可用。 另外,许多可用的模型都不完整,需要进行工程判断才能对缺失的信息做出明确的结。
本文介绍的船舶模型是由澳大利亚ADI公司设计的海军巡逻快速单体船,从未投入生产。 实际上,这种设计是由一艘丹麦船发展而来的,Blanke和Christensen(1993)发布了这种船的操纵系数。 另外,Perez等人 (2006)修改了限制ADI的数据,使机动模型与海水模型相结合,以提供逼真的模拟环境。
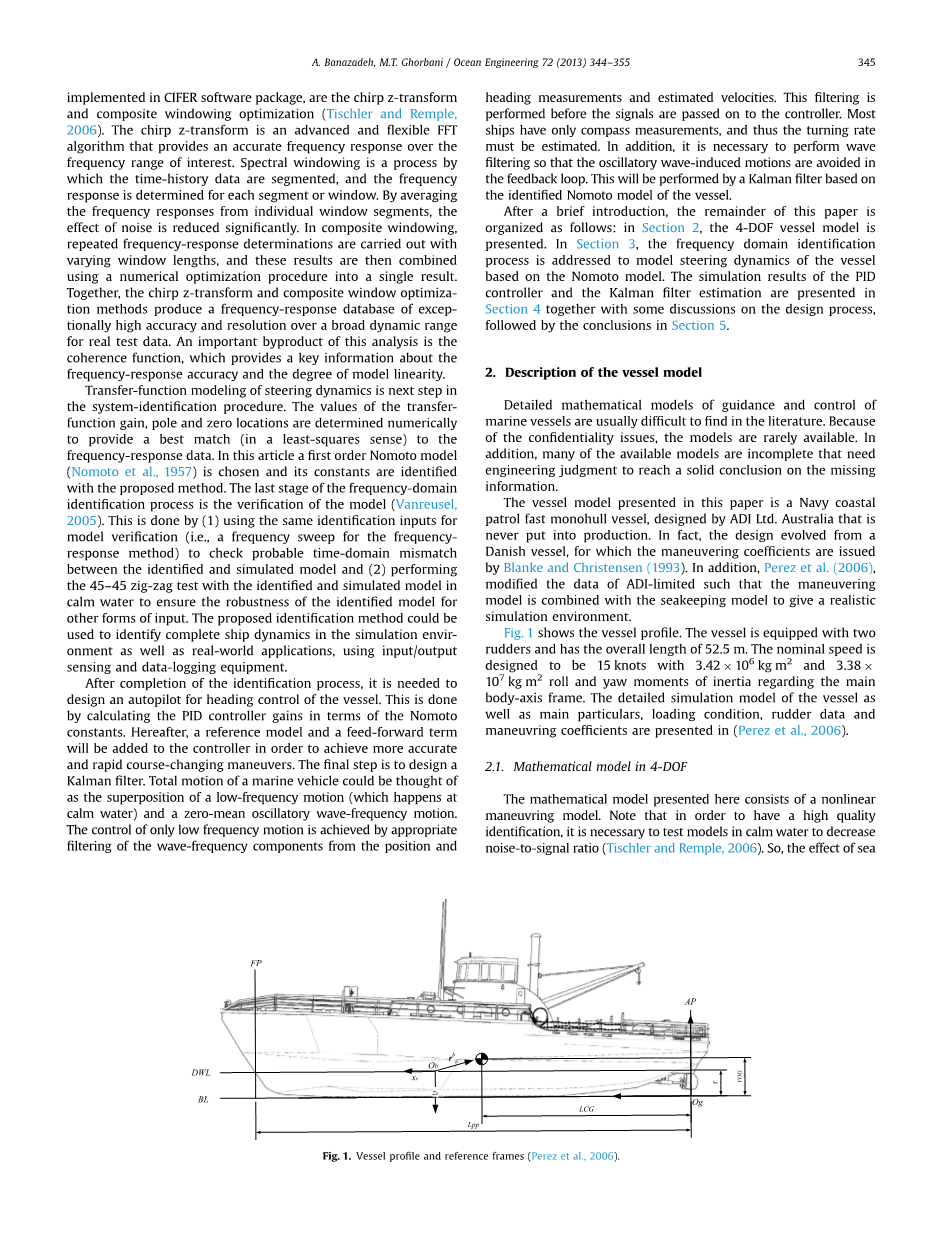
图1显示了船只轮廓。 该船配备两个方向舵,总长度为52.5米。 标称速度设计为15节,其中3.42times;106kg / m2和3.38times;107kg / m2关于主体轴架的横摇和横摇惯性矩。 (Perez et al。,2006)中介绍了船舶的详细仿真模型以及主要细节,载荷条件,方向舵数据和机动系数。
图1.船舶剖面图和参考框架(Perez等,2006)
2.1.四自由度数学模型
这里给出的数学模型由非线性的机动模型组成。 请注意,为了获得高质量的识别,有必要在平静的水中测试模型以降低噪声与信号的比率(Tischler和Remple,2006)。 因此,在识别过程中,海浪对船舶动力学的影响在本研究中被忽略,即耐波性。 机动运动方程式是在身体固定的框架(b框架)的原点处形成的,它具有坐标Ob=[Lpp / 2,0,T]T 相对于后部垂线(AP), 中线和基线(BL),如图1所示。实际上,选择人体固定框架的原点,使得人体固定坐标系统的惯性张量将通过应用平行轴 定理(Fossen,1994)。
为了研究船舶的运动控制问题,通常忽略起伏和俯仰运动分量。 因此,四自由度下的刚体运动方程(波动,摆动,滚转和偏航)如下(Perez和Fossen,2005):
(1)
其中m是船只的质量,分别是关于和的时间惯性向量。分别是波浪和摇摆力的矢量,横摇和横摆力矩。是线性的浪涌和摇摆矢量。是角度滚动和横摆率在人体固定坐标中的矢量。u,v,r和p上方的点表示相应物理变量的时间导数。 在(1)中,
(2)
是身体固定框架中重心(CG)的位置向量(如图1所示)。(1)右侧的力和力矩矢量可以分解为以下几部分:
(3)
下标代表流体力学和流体静力,控制装置力和推进力。 水动力和力矩是由于船在静水中运动造成的,模 拟为速度的一系列扩张和恢复项的滚动角(Abkowitz,1964)。
假定推进力是固定的并且补偿了平静的防水能力,因此船的标称速度是7.71m / s的恒定值。 船只模型配备两个方向舵。 方向舵在车身固定架上产生的力和力矩如下:
(4)
其中和是压力中心的坐标方向舵(CP)相对于B架。
D和L分别表示水翼的升力和阻力,这是翼片上局部速度,翼片面积,迎角和有效纵横比的函数(Perez等,2006)。
总之,船舶的非线性机动模型的控制输入是实际的舵角。 需要控制的模型的输出是偏航角。 控制策略决定航向控制的实际舵角,同时考虑船舶的侧倾角不超过某个值。
2.2.方向舵液压机械
使用Van Amerongen(1982)的模型实现了液压机械运动舵。 也就是说,它们具有最大角度alpha;max和最大速率。 当在非饱和区工作时,其行为像时间常数值为的一阶系统,其中alpha;pb是所谓的比例带,如图2所示。实际上,指令的舵角和它的速率是通过过滤以构建适用于船舶动力学的实际舵角。
图2.液压执行器模型的简化框图(Perez和Fossen,2005)
3.频域系统识别程序
图3提供了频域系统识别过程所需步骤的概念性总结。这些概念包括:(1)采用频率扫描输入从测试台的激励收集时域数据;(2)数据处理 ,(3)频谱分析和频率响应函数识别(非参数系统识别),(4)传递函数建模(参数识别)和(5)模型验证。
图3.系统识别过程
3.1.时域数据收集和数据处理
系统识别过程的第一步是收集一个非常合适的时间历程数据库。 用于频率域识别的推荐输入是频率扫描,因为它可以在感兴趣的频率范围内提供相当均匀的频谱激励,以实现良好的频率响应识别,并且对系统动态的先验知识中的不确定性具有鲁棒性。 在鉴定文献的术语中,输入信号必须持续激发,这大致意味着系统的所有模式(感兴趣的)都被激发。 因为在识别过程中唯一的控制输入是指令的舵角,所以它被构造为频率扫描,使用下面的等式(Young和Patton,1990):
(5)
上式A是扫描幅度
(6)
上式是总扫描记录长度,频率累进由下式给出
(7)
其中K由下式给出
(8)
已发现C1 = 4.0和C2 = 0.0187的值适用于广泛的应用。
在(7)中,[omega;min,omega;max]是确保相干性和相关频率响应精度在模型适用频率范围内可接受的所需频率范围(在此范围内,所识别的模型可以预期有效)。
广泛的应用经验表明,总的扫描记录长度omega;min应该如下(Tischler和Remple,2006):
(9)
请注意,记录以零舵角开始和结束,以确保良好的稳态状态。
为了丰富频谱内容,频带限制的白噪声分量也被添加到扫频中:
(10)
噪声信号的典型均方根(lϬ)电平被选择为:
(11)
白噪声分量应该用低通滤波器(omega;f=omega;max)进行处理,以抑制激励中的高频成分。
图4显示了构造的方向舵频率扫描100秒。 扫描振幅A为45°,omega;min为0.1pi;(rad)s,omega;max为8 rad / s。 如图所示,为确保开始和结束时的稳定状态,信号在3秒内设置为零。
图4.命令的舵频率扫描输入
3.2.频谱分析
每个输入 - 输出对的频率响应使用Chirp-Z变换计算。 Chirp-Z变换(CZT)是一种高度灵活的快速傅立叶变换(FFT)算法,与标准离散傅里叶变换DFT相比,具有多种优势。 CZT的主要优势如
全文共14710字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15043],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

