
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
一种新的快速采样预测块匹配算法
摘要
基于块的运动估计是视频编码应用中必不可少的, 它可以有效地减少序列的时间冗余。尽管完全搜索算法 (FSA) 无疑能够得到全局最优估计, 但它是计算密集型的。提出了一种新的基于采样预测块匹配算法 (SPBMA) 的算法, 它将运动矢量平均预测采样匹配和自适应菱形搜索的思想结合起来。实验验证了该算法在精度和速度上的优越性 (对于母女序列, 基于采样预测块匹配算法的速度是完全搜索算法的108倍, 但是在信噪比上只有 0.75%)。它适用于对超低功耗的严格需求的无线视频通信。
1 概述
通过减少视频序列帧间存在的时间冗余来进行高压缩, 块匹配运动估计(BMME) 在视频编码应用中是必不可少的。与光流和贝叶斯算法相比, 块匹配运动估计算法结构简单, 计算量少。因此, 它已被几个国际视频编码标准所采用, 如 H. 261/263 和 MPEG-1/2/4。
搜索精度将决定编码匹配误差的比特大小(ME), 这也称为补偿差异或匹配差异。通过彻底测试搜索窗口中的所有候选位置, FSA 可以提供全球最佳解决方案。但不幸的是 FSA计算量过大以至于可以消耗大约80%的编码能力。为了克服这一缺点, 以前提出了几种快速算法来缓解繁重的计算, 例如三步搜索 (TSS)、新的三步搜索 (NTSS)、四步搜索 (4SS)、菱形搜索 (DS) 等。这些快速算法更好地利用了运动矢量的特性, 并且都是基于一个假设, 即大多数的运动矢量都分布在搜索窗口中心周围的一个小区域内, 这称为中心偏置。程和孙提出了另一种有效的算法称为两步搜索 (TWSS), 它可以通过抽样匹配来极大地减少计算负载。本文提出了像素抽取的抖动模式 (DPPD) 的方法, 在宏块中生成均匀分布的抽样像素, 然后用48个抽样像素进行估计。但是, 两步搜索结构不简洁, 因此不适合并行实现。
另外两种快速算法称为运动矢量场自适应搜索算法 (MVFAST)。预测运动矢量场自适应搜索算法 (PMVFAST) 考虑了运动矢量场的时空相关性。PMVFAST 建议候选集的中值向量应为初始搜索位置, 并证明运动矢量的分布与中间偏置一致。
本文提出了一种新的有效的块匹配运动估计算法, 称为采样预测块匹配算法 (SPBMA)。该算法结合三技术, 运动矢量均值预测采样匹配和自适应菱形搜索。与现有算法相比, 采样预测块匹配算法具有相似的搜索精度和出色的执行速度。在第2节中,
上述三技术将首先说明, 此后将会描述采样预测块匹配算法的细节。第3节给出了仿真结果和比较。最后, 将在第4节中做出结论。
2. 采样预测块匹配算法
2.1.抖动矩阵
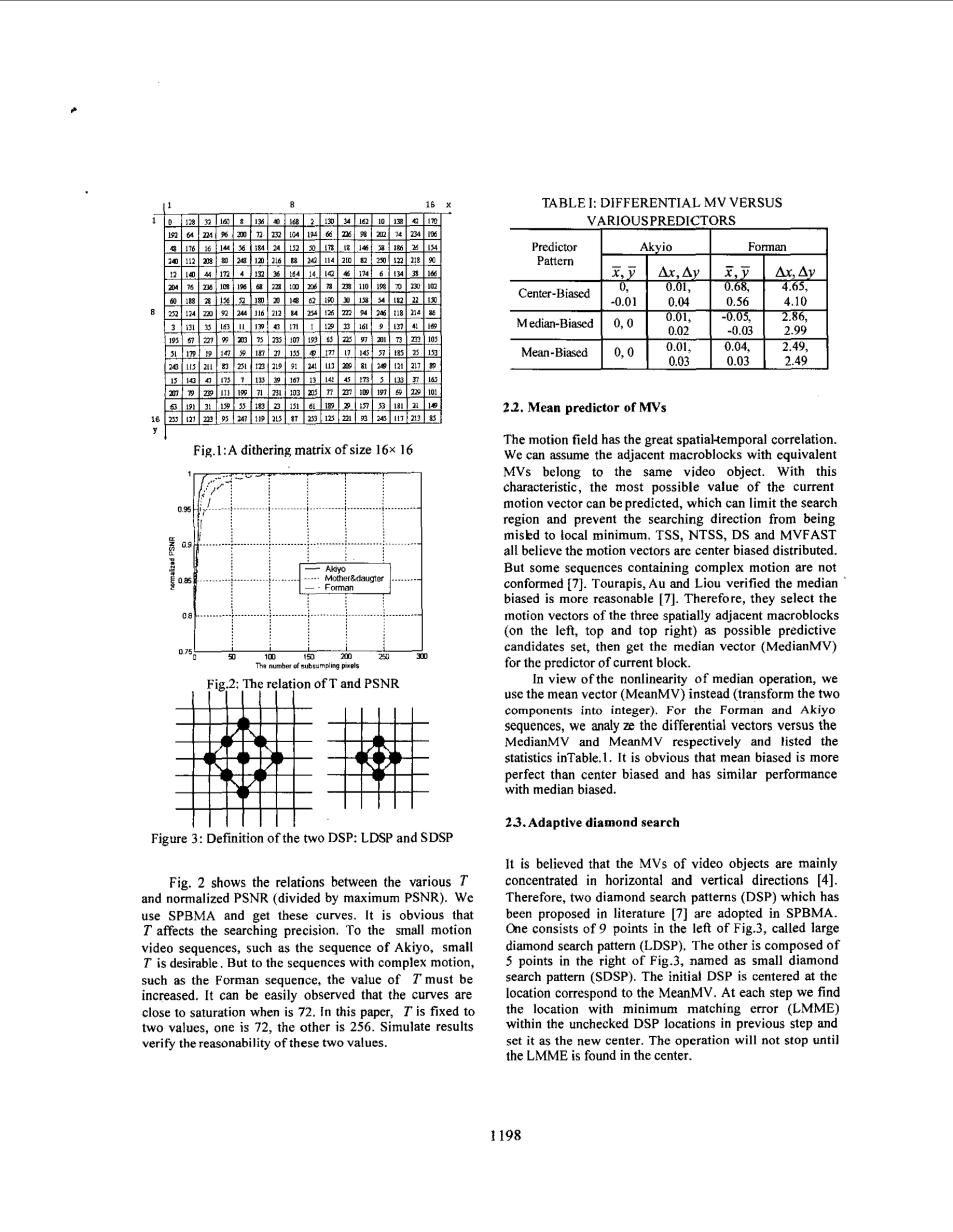
在文献中, 提出了抖动矩阵来生成任意数量的抽样像素, 并确保它们在宏块中是平均分布的。图1是一个与本文所使用的宏块相对应的抖动矩阵的例子。我们使用 t (t = 256) 像素 (他们的矩阵值不超过T-1) 每个宏块来评估全搜索法。
图2显示了不同 T 和归一化的信噪比之间的关系 (除以最大信噪比)。我们使用 SPBMA, 得到这些曲线。显然, T 影响搜索精度。对于小的运动视频序列, 如 Akiyo 序列, T值较小是可取的, 但对于复杂运动的序列, 如领班序列, T 的值必须增加。可以很容易地观察到, 当T为72时曲线接近饱和度。本文对两个值进行了修正, 一个是 72, 另一个是256。模拟结果验证了这两个值的合理性。
2.2 运动矢量平均预测
运动场具有很大的时空相关性。我们可以假设相邻的宏块与等效的运动矢量属于同一视频对象。具有这一特点, 可以预测当前运动矢量的最可能值, 从而限制搜索区域, 防止搜索方向被误导到局部最小。三步法、新三步法、菱形法 和 MVFAST 都认为运动矢量是中心偏置分布。但一些包含复杂运动的序列不符合。Tourapis、Au 和Liou验证得到中值偏置更合理。因此, 他们选择三空间相邻宏块的运动矢量 (在左侧、顶部和右上方) 作为可能的预测候选设置, 然后获取当前块的预测的中值向量。
针对中值运算的非线性, 我们使用均值向量 (MeanMV) 代替 (将两个分量转换为整数)。对于Forman和 Akiyo 序列, 分别分析了差分向量,中值向量和均值, 并在表1中列出了统计数据。明显的是, 平均偏倚比中心偏置更完美, 具有与中位偏倚相似的表现。
2.3 自适应菱形算法
现在普遍认为视频对象的运动矢量主要集中在水平和垂直方向。因此, 两种在文献[7]中提到的菱形搜索模式 (DSP)被运用于基于采样预测块匹配算法。图3的左边9点, 被称为大菱形搜索模式 (LDSP)。另一种是由图3右侧的5点组成, 称为小菱形搜索模式 (SDSP)。初始菱形搜索的中心位置对应于均值运动矢量。在每个步骤中, 我们在前一步的未检查的菱形搜索位置中找到最小匹配误差 (LMME) 的位置, 并将其设置为新的中心。直到在中心找到 LMME,操作才会停止。
2.4基于采样预测块匹配算法
基于采样预测块匹配算法结合了上述三思想: 运动矢量均值预测,采样匹配和自适应菱形搜索。此外, 还包括一步停止技术。基于采样预测块匹配算法概述如下:
步骤1: 设置两个阈值 TI 和 T2 (T1lt;T2) 和计算均值运动矢量。做块匹配使用72采样像素并得到匹配误差 (这里使用求和绝对误差,也叫SAD)。如果 SADlt;T1, 停止和输出均值运动矢量, 这称为一步停止技术。否则, 如果 TIlt;SADlt;T2, 请转到步骤 2,其他的转到步骤3。
步骤2: 使用72个采样像素重复小菱形搜索模式, 然后记录最后的最小匹配误差, 转到步骤4。
步骤 3: 使用72个采样像素重复大菱形搜索模式, 然后记录最后的最小匹配误差, 转到步骤4。
步骤 4: 以记录点为中心点, 进行小菱形搜索, 使用256采样像素搜索一次, 输出最小匹配误差对应的位置的运动矢量。
3. 模拟结果
在本节中, 我们实现了完全搜索算法、三步搜索法、两步搜索法和运动矢量场自适应搜索算法, 并将其与基于采样预测块匹配算法的搜索精度、计算复杂性和理论编码大小进行了比较。实验中选择了运动幅度小和运动复杂的序列各两个。小的运动序列是 Akiyo (cif, 200 帧) 和 母女(cif, 200 帧)。复杂运动 序列是负责人 (CIF, 200 帧) 和网球 (SIF, 100 帧)。在实验中, 只计算每帧中的亮度分量 (U 分量)。 宏块大小固定在16x16 上, 行和列中的最大运动全部限制为7像素。两个阈值 TI 和 T2 分别设置为36和128。
平均峰值信噪比和每像素平均值绝对差 (MAD/像素) 用来比较搜索精度。我们定义进入加速是完全搜素算法与其他算法计算负载的比值。为了比较编码位的大小, 本文提出了每个像素 (H/pixel) 的参数熵。H/像素的值可以通过以下过程获得。首先, 进行运动估计, 得到了匹配误差。第二, 每个宏块分割成4块,接着,这些块被做 DCT 和量化 (这些矩阵都含有 16个像素,由 H. 263 支持的内部编码)。最后, H/像素的值就是量化系数的熵除以总像素数。由于该过程与标准化视频编码相似, 认为该参数 H/pixel 可以更好地测量精度性能。
图4和图5分别给出了 Akiyo 和负责人图像序列的信噪比的实验结果。从这些数字,我们清楚地看到, 建议的基于采样预测块匹配算法可以保持跟完全搜索算法对微小且复杂的图像序列的处理效果。此外, 基于采样预测块匹配算法优于三步搜索法,可以提供几乎相同的搜索精度与两步搜索法和运动矢量场自适应搜索算法(在图 5中可以很明显的看出)。由于运动矢量均值预测技术, 基于采样预测块匹配算法可以防止搜索方向被误导到局部极小值, 因此与两步搜索法和 三步搜索法的比较得到一些改进。
表11给出了四项的详细比较。可以看到, 对于包含简单运动的序列, 基于采样预测块匹配算法有相似的搜索精度和理论编码大小的其他算法的快速 (约 108326, IO-32,5-16 和34倍的速度完全搜索法, 三步搜索法, 两步搜索 和运动矢量场自适应搜索算法分别)。对于包含复杂运动的序列, 显然基于采样预测块匹配算法优于完全搜索法, 三步搜索法, 两步搜索 和运动矢量场自适应搜索算法在搜索精度和理论编码大小上几乎相同 (大多数项目都优于 TWSS), 并且具有显著的速度 (约 74-76, 7.4-7.6,3.7-3:8 和 3.1-3.3 倍的速度与完全搜索法, 三步搜索法, 两步搜索 和运动矢量场自适应搜索算法分别)。
4. 结论
基于运动矢量均值预测、采样匹配和菱形搜索, 提出了一种新的块匹配运动估计算法, 称为基于采样预测块匹配算法。尽管在搜索精度上略有劣势, 基于采样预测块匹配算法在速度上具有突出的优越性。因此, 嵌入基于采样预测块匹配算法的视频设备的威力将会保持在低位。此外, 基于采样预测块匹配算法结构简洁, 内存少。因此, 得出的结论是, 该算法可应用于广泛的应用领域, 尤其是无线手持视频设备。
近年来, 图像取证领域已经取得了一些进展。在没有任何形式的数字签名的协助下, 提出了许多方法来检测图像的篡改。这些方法大多被提出来检测任何一种伪造。Fridrich 给出了检测复制-移动伪1以及双压缩 JPEG 图像2的方法。Popescu 设计了一种用主成分分析法对小图像块进行重复图像区域和曝光数字伪检的方法, 以得到减小的维数表示3。其他技术4使用了表示法减少尺寸, 如 DCT, 以找到匹配的区域。在5提出的基于块的 Bayram 技术中, 采用了傅立叶梅林变换。约翰逊建立了几种方法来检测数字伪造通过光在一致性6和镜面亮点7眼。在 89, t. Q 石提出了检测图像拼接的统计模型。10提出了一种基于零连通特征和模糊隶属度的样本修复检测方法。
运动估计是标准视频编解码器中的一个基本元素, 如261、MPEG 1 和 MPEG2。文中提出了几种块匹配算法 (BMAs)。虽然已设计了许多快速搜索块匹配算法, 以降低计算复杂性, 但它们显示的图像质量低于全搜索 (FBMA)。因此, 如果可能, FBMA会被广泛使用。为了实现对前一像素数据的实时操作和重用, 采用收缩阵列处理器进行 FBMA。有一些体系结构具有100处理元素 (PE) 利用率。但由于2维 PES 需要计算运动矢量 (MV) 和空闲周期时间来对齐下一个候选块, 而图像数据本身具有2维属性, 因此, 考虑整体系统, 很难实现100的 PE 利用率。.本文提出了一种具有高吞吐量的低功耗 VLSI 结构, 在随机搜索 FBMA (RBMA) 和 FBMA 之间具有低的转换开销。
为了找到解决嵌入式系统存储空间、传输容量和数据量之间矛盾的方法, 采用数字集成技术, 提出了一种基于块匹配的数据压缩方案的电路。该方案可实现无损实时数据压缩, 减少数据量。通过对数据源的统计分析, 可以得出该方案在实时性能、实现的复杂性、效率和实用性等方面具有许多优点。因此, 数字电路被认为是一种能够呈现编码过程的方法。在 QUARTUS II 的帮助下, 他们结合 Verilog 和示意图来完成设计, 并使用 C 语言对解压程序进行编码, 以进行比较。通过仿真和相关实验验证了电路的精度和效率。使用块匹配软件算法, 平均压缩率为 52.3, 12 MHz 时钟频率, 平均压缩速度比一个快352。该方案在许多嵌入式系统中具有良好的性能。
随着数字社会对信息需求的不断增加, 巨大而复杂的信息导致人们面临大量的数据。如今, 许多电子工程师已经厌倦了更换更大的硬盘, 扩展了更多的内存, 增加了更大的网络带宽, 以存储和传输越来越多的声音, 图像和其他数据为计算机。因此, 寻找一种有效、可靠的数据压缩方法来减少数据量是至关重要的。数据压缩在各个领域得到了广泛的应用。例如, 公司需要在压缩后投入大量数据以减少存储空间, 移动通信软件在保存和传输数据时也需要有效的压缩。目前, 有许多成熟的技术来实现数据压缩。根据压缩信息失真度, 数据压缩主要分为有损压缩和无损压缩。通过数据压缩和解压, 有损压缩是一个不同的, 但非常接近原始数据方法。它通常用于图像和数字音频领域。然而, 由于测量对象3–5的不确定性, 大多数监控系统都需要使用无损压缩。无损压缩, 顾名思义就是恢复原始数据, 而不会在压缩和解压过程中产生任何失真。主要包括哈夫曼编码、算术编码、运行长度编码和字典编码。Stabno 和 Wrembel 利用二进制堆对哈夫曼编码的改进应用进行排序, 通过减少内存访问的最小化次数, 提高算法的效率。然而, 改进后的算法使得每个编码单元的长度不同。它对资源有限且要求高实时性能的嵌入式系统来说是不太好的。LZ 编码具有较高的压缩和解压速度。它在不太复杂的硬件条件下, 对不太可预测的数据具有更好的性能。尽管 lz 编码在文本数据压缩中得到了广泛的应用, 但数据字典将占用空间, 使得 lz 编码的容量不能完全用于嵌入式监控系统8、。方案9提出了一种新的基于动态字典的压缩方法。该词典只需要保留最常用的频率数据, 从而大大减少了内存大小要求, 消除了显式字典初始化步骤。然而, 对于随机二进制数据
采集的监控系统, 压缩率不高。提出了一种基于运动矢量差分的有效优化 二进制算术编码算法, 主要用于压缩图像数据。由于计算复杂度高, 故未得到广泛应用。为了提高数据压缩和压缩的实时性, 研究已经转向数字集成电路领域。数字集成电路技术在电信领域有着广阔的应用前景。随着 CMOS 技术的发展, 集成电路的性能也得到了提高。目前, 在数字集成设备的基础上, EDA (电气设计自动化) 开发平台下的现代数字系统设计正在逐步成熟。工程师可以根据系统的功能设计特殊的集成设备。本文根据基于块匹配过程算法中传感器的数据分析, 设计了一种数
全文共6094字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11235],资料为PDF文档或Word文档,PDF文档可免费转换为Word

