
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于电流反馈对微型步进电机的丢步侦测和误差补偿
摘要
本文采用一个方法去侦测卫星步进电机的丢步,并对丢步进行补偿以维持其正常运转。本文对电流线圈及其运行状况进行研究去了解丢步的发生和中止。当一个丢步被准确鉴别时,一个与之相应的补偿计划也会被提出。虽然采用译码器去测量位置误差是一种误差补偿的方法,但由于丢步带来的误差的本质原因并未被清楚识别。更确切地说,使用电流反馈代替译码器测量可以更清晰地确定位置误差补偿。
关键词
丢步 位置误差补偿 微型步进电机 电流反馈
引言
步进电机在机械化设备中被广泛使用,例如打印机和复印机器。电机旋转以响应输入脉冲,因而在没有反馈信号时授权位置控制。通常来说,步进电机由于其结构上的最小步距角会受限于精确的位置控制。同时,共振时常以一个特定的频率发生,当在共振频率以下时运转这些点击时,使用者必须十分谨慎。自20世纪70年代开始,微型步进器械便被用于解决此类问题。将正弦曲线的输入电流应用于电机线圈是微步算法。通过采用微步驱动法,增强位置控制的表现和通过减少共振影响去提高驱动速度表现是有可能的。在微型处理器的帮助下,步进电机可以进行具体翔实的操作。反馈控制或空间矢量的脉宽调变计划被用于增强电机的精确度。
但是,当丢步由于外部荷载或严重的环境改变在电机运转时发生,这同样伴生着会导致严重问题位置错误,而位置控制本应该无比精确。位置传感器常被用来稳定电机运转,例如译码器。以变焦相机模块为例,强化位置精确度的微型步进电机会用于链接译码器的反馈控制。然而,用于精准控制角度的译码器是非昂贵,且其需要额外的装备空间。并且,即使这些译码器提供了位置数据,它们也许不能清晰地认证位置错误的主要原因是丢步或者是其他原因。
其他侦测丢步的方法主要依靠对集成逻辑门的大量电流测试。这些工具仅能侦测线圈实验是否是精确的丢步或者是错误的角度,但并未决定丢步的发生和中止。因此,必须以不同的测量设备去清楚地认定丢步(导致位置误差的主要原因),同时也应当用译码器以外的设备去探究相应的误差补偿计划。
在这一工作中,电流信号测量和微型步进电机的分析决定了位置误差的出现是否是因为丢步操作,如果是的话,那么需要补偿多少丢失的角度。一个相对简单的电子回路被用于测量线圈电流的流动,进而去证实丢步,并避免使用昂贵的译码器。一个相对应的误差补偿算法被设定,并通过实验对其变现进行核实。
细分驱动
步进电机在低频下是易受振动影响的,且丢步通常发生在共振频率范围附近或处于沿着外部荷载之下。细分驱动提供了解决这一问题的方法。通过对线圈采用正弦电流的输入,细分驱动能比通常的1.8°每输出脉冲更出色地控制角度。因此,位置分辨率提高,转矩波动降低,且发动机的转矩和速度表现获得提升。所以,伺服传动装置的实施会花费更少,对位置精确度的控制会扩大。
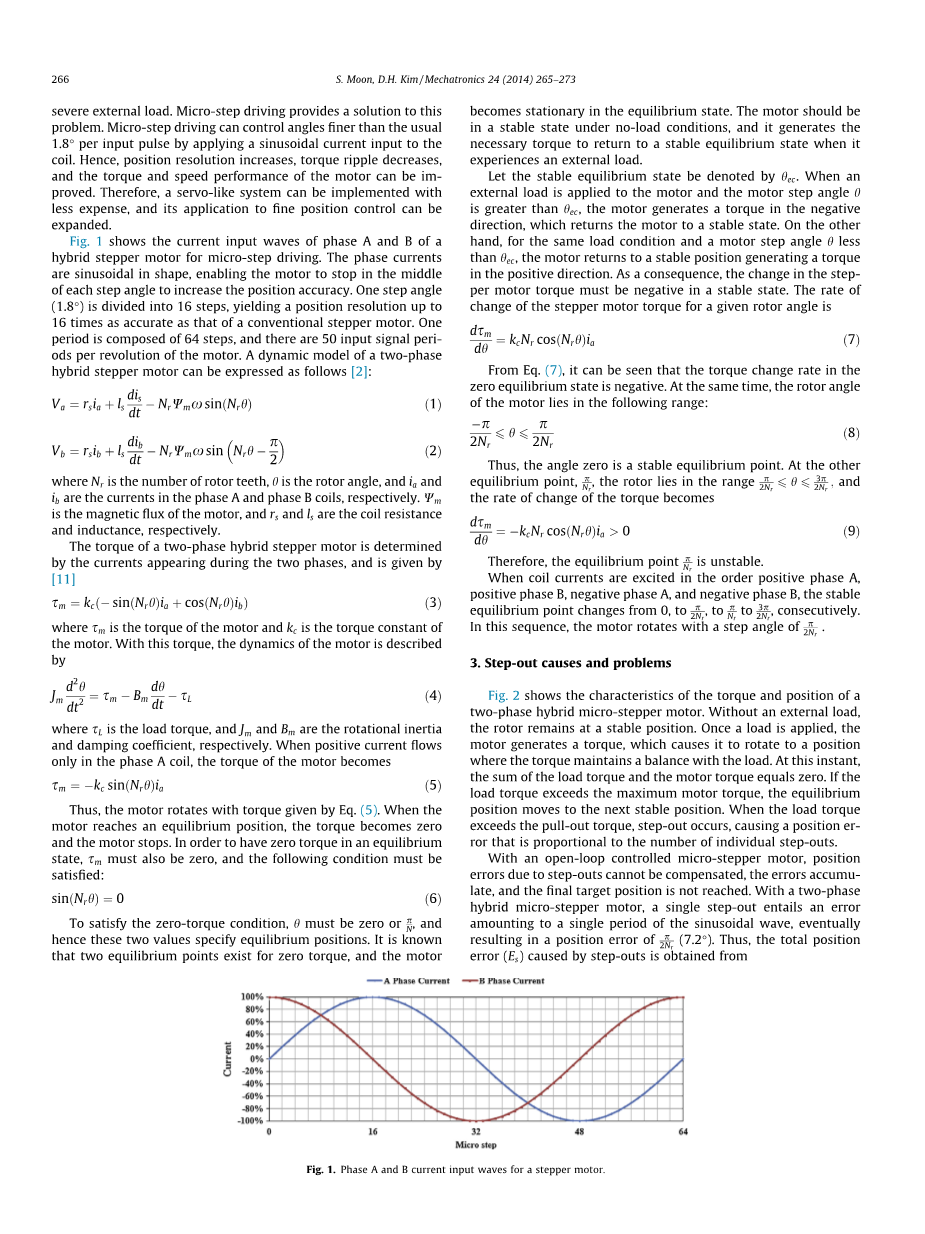
图1展示了混合步进电机在细分驱动下A、B两个阶段的电流输入波动。阶段性电流呈现正弦曲线的形状,允许电机在每个阶段步距角中停止,增加了位置准确性。每个步距角(1.8°)被分为16个,使得位置分辨率比传统步进电机精确了16倍。每一个阶段由64个部分组成,且电机旋转一周有50个输入信号。一个灵活的两阶段混合步进电机模型可以用以下公式进行展示:
公式1
公式2
Nr是转子齿的数量,是转子角,Ia Ib是阶段A B线圈中的电流。m是电机的磁通量,rs ls是线圈的电阻和感应系数。
两阶段混合步进电机的转矩是由两个阶段中出现电流所决定的,公式如下
公式3
Tm是电机的转矩,Kc是电机的转矩常数。在负载转矩明确的情况下,电机动力可用以下公式表述
公式4
Tl是负载转矩,Jm Bm是转动惯性(惯性矩)、衰减系数。当正向电流仅在阶段A线圈中流动时,电机转矩会变成
公式5
因此,电机以转矩旋转 by Eq.当电机到达均衡位置时,转矩为零,电机停止。为了在均衡状态下达到转矩为零的情况,Tm必须为零,且以下公式展示条件必须满足:
公式6
为了满足零转矩的条件,必须为0或,因此,这两者达到了具体的均衡位置。众所周知,零转矩时存在两个均衡点,电机也会达到均衡状态的静止。在无负载情况下,电机应当处于稳定状态,且当其经历了外部负载时,其也会产生必要的转矩去重新达到一个稳定均衡状态。
用去表示稳定均衡状态。当外部荷载被加于电机上时,电机步距角是大于的,电机转矩会出现在负极,这也将使得电机趋于稳定。另一方面,在同样荷载的条件下,电机步距角小于时,电机转矩会出现在正极以达到稳定。结果是在稳定状态下,步进电机的变化必须是负的。在给定转子角下,步进电机的转矩变化率是
公式7
从公式7看,转矩变化率在零均衡状态下是负的。同时,电机的转子角会在以下公式所示范围浮动:
公式8
因此,角度为零是一个稳定均衡状态。而另一个稳定均衡点,,位于,转矩变化率则变成
公式9
因此,稳定均衡点是不固定的。
当线圈电流活跃在正向阶段A、正向阶段B、负向阶段A和负向阶段B时,稳定均衡状态点经历了从0到到到的变化。在这个序列中,电机以的步距角进行旋转。
丢步原因和问题
图2展示了一个双阶段混合微型步进电机转矩和位置的特点。在没有外部荷载的情况下,旋转器会保持一个稳定的位置。当荷载被施加时,电机会产生转矩,使得其旋转到一个转矩与荷载保持平衡的位置。此时,负荷扭矩和电机转矩的总和为零。如果负荷扭矩超过了最大的电机力矩,均衡位置会移动到下一个稳定点。当负荷扭矩大于电机的牵出转矩,丢步便发生了,这使得位置误差与丢步的数量成比例发生。
在开环控制微型步进电机时,由于丢步产生的位置误差不能被补偿,误差会积累,且最终的目标位置不能到达。在双阶段混合微型步进电机中,一个单个的丢步需要一个正弦曲线电流的误差,最终致使(7.2°)的位置误差的产生。因此,由丢步产生的全部位置误差是来源于
公式10
Mn表示一个正弦曲线波浪中的微步的数目。I表示独立丢步的数量。通过将一步(1.8°)除以125,Mn在当前的微型步进电机中可以达到500,并产生了500的正弦表,这也解释了在一个正线曲线周期中微步的数量。关于译码器脉冲和微步进关系的细节描述将会在第五部分展开。
4、丢步侦测的电流反馈
微型步进电机的丢步是一个严重影响其表现的问题。当电机被施加外部荷载时,对丢步的精确侦测与预防必须被清楚调查。由于丢步的重要性,对误差的补偿也十分重要,尤其是在应用了微型步进电机的PTZ系统中。由于译码器在丢步现象开始和结束上的不确定性及其对于精确误差测量的高分辨率要求,其对丢步的侦测是受限的。这里,我们采用另一种方式去侦测丢步,并对最终的误差进行补偿。
4.1使用不同放大器的电流反馈
本文设计了一个不同的放大器去放大两个线圈电流的不同。其电路在图3中展示。输入电流进入放大器,、计算公式如下
公式11
公式12
在已知两个输入电流情况下,放大器的输出电压可由以下公式得到
公式13
4.2丢步侦测算法
图4展示了当电机处于稳定时,荷载被故意施加于电机上去产生丢步时A阶段的线圈电流和译码器数据。Ep和Ac表示译码器数值和A阶段线圈电流,是A阶段电流Ac的不同值。阶段电流的测量值是从模拟转变为数据的有效的整数值。在通常的微步驱动中,Ac在从正变为负的点Pa是大于放大器的电压的,在从负变为正的带你Pb是小于放大器电压的。然而,在丢步时,情况正好相反。在点Pc,Ac是大于放大器电压的,即使从负变正。这也表明了相较于正常情况下,丢步是具有不同特点的,也提供了一个重要的限速去侦测丢步。因此,在每一次从负变正的点上,Ac和放大器电压是相应的,且Ac比放大器电压大这一条件可用于侦测丢步。
5.丢步相关的位置误差及其补偿
对步进电机的开环位置控制通常是由输入脉冲信号完成的,位置与输入脉冲数量成比例。当外部环境变化时,丢步发生,要求的电机位置无法保证,而积累的错误即使在丢步结束后仍然存在。从长期可持续电机运转来看,丢步应该可预测和避免,且由丢步带来的位置误差应该可以通过合适的步骤进行补偿。这里,我们采用另一种方式去侦测丢步,并对最终的误差进行补偿。
5.1在PTZ相机模型中的丢步实验
图5展示了在PTZ相机模型中的丢步实验中的结果。当丢步发生时,电流信号的形状相较于正弦曲线会发生较大扭曲。同时,译码器信号在一个确定的间隔中保持不变。然而,当译码器信号保持不变时,明确区别丢步和正常运转的表现是不容易的。换言之,对译码器输出脉冲变化的简单计算并不能得出丢步的准确数量。如图5所示,译码器测量的脉冲的不同在每一个丢步上的价值也不同,即使保持不变。为明确研究,当发现丢步时,电机会被有意中止,译码器数值(Ep),电流(Ac),电流差异值()会被测量。
图6展示当丢步发生,电机停止时测量的Ep、Ac、的数值。译码器被用于证实丢步和相对应的实际角度的关系。它包含于实际系统,不管是否被用于PTZ系统,仅仅是为了与用于丢步产生的错误的侦测和补偿的电流信号进行对比。译码器有着1200脉冲每公转的分辨率,输出信号是原始输入信号的四倍,即4800脉冲每公转。微型步进电机在每一个独立的步进运动中有着125个微步进。同样,一个导致位置误差的独立丢步会与500个微步进相对应。一个独立的丢步会在译码器中产生96个脉冲。因此,通过测量译码器脉冲总数量,实验中的丢步数量可以被确定。图6展示了在280个丢步情况下,译码器脉冲的不同,包含三个丢步的发生。尽管如此,我们可以看到从电流信号分析而不是译码器感知测量可以获得准确的丢步数量,且其允许位置误差补偿。更多细节的丢步数量估计和位置误差补偿步骤会在下一部分介绍。在丢步发生后,电流信号浮动,最终消失。当电机脱离一个稳定状态移动至下一个稳定状态时,这种抑制波动便会发生。在丢步发生后,三个阶段的振动出现,振动的时间间隔是比上一次丢步时的大,表明电机移动到下一个稳定点。这长时间的间隔提供了决定性的线索去研究丢步数量,同时也是接下来的位置误差补偿的指导。
5.2位置误差侦测和补偿算法
根据实验,一个丢步对应着四个微步进的位置错误,这也使得通关计量丢步数量去估计总共的位置误差成为可能。丢步数量的侦测是通过的数据得来的,而非使用译码器。
根据丢步发生的位置,Ac可能大于或者小于放大器的指数。一旦Ac数值充分稳定,它便与放大器数值相对应。图7展示的是决定丢步的数据,也是Ac大于放大器指数时对位置误差进行补偿的标准。每个阶段达到最大值和最小值的所用时间都会被记录。从第一个丢步到最后一个丢步的范围,当从正变负时,令最大值为HP1;当从负变正时,令最小值为LP1。直到在整个阶段中峰值消失,数据才会被记录。接下来,消耗时间(ti)是从峰值到谷值的计算,i计算公式如公式14
公式14
这里,在最大值ti时的i值决定了丢步的数量。I的最大值之所以能决定丢步数量,是因为在最后一个丢步时,电机转矩会比上一丢步阶段的小,这是因为在涡轮和车轮之间的形成荷载减少,使得其在阶段电流变化比之前两个阶段花费时间更多。在最大值ti之后,电流逐渐减弱,这表明丢步已经终止,电机移动到下一个稳定点。图7展示了最大值时间时t3,表明在整个运转中有三个丢步。在两个丢步之间,电流振幅比之前的输入电流大,并在下一丢步中减小。通过测量译码器的角损耗,三个丢步出现的正确性被证实。
使用Eq下,通过将一个正弦曲线Mn的微步进数量与丢步(i)数量相乘可以得到位置误差(Es)。一旦一个严重的丢步发生,电机停止运转,用之前位置减去丢步角度可以得到新位置。用Pold表示之前之前位置的脉冲指令(如果丢步没有发生,则通过输入指令估计)。在补偿丢步后,新的位置脉冲指令由以下公式得出
公式15
在Ac阶段,阶段A线圈电流是小于放大器指数的,这也对决定丢步和位置误差补偿时有效的。图8展示的是本阶段的丢步侦测和位置误差补偿。与图7展示状况相反,HP1是当从负变正的最大值,LP1是从正变负的最小值。这将一直持续直到在整个阶段中峰值消失。接下来,每个峰值的耗费时间(ti)的计算如下
公式16
在ti最大值时的i值决定了丢步数量。
6.实验结果和分析
在拥有微型步进电机的PTZ相机模型中实施丢步实验和误差补偿措施,测量的数据储存在微型处理器的记忆数列中。总数为300的数列被分配去储存Ac和,且在每十个微步进中一个基于300数列的模拟到数据的转换会被执行。图9有例,在第97个数列中发现丢步的地方,150个模拟到数据的转换被执行(总计1500个丢步),并被持续储存到第246个序列中。在这个点上,序列被重组,从第247个序列(包含着原始的模拟到数据转换的数据)移动至序列0。根据时间顺序重组数据,是有可能在第150个序列的丢步中储存模拟到转换数值的。
图10展示了丢步侦测和误差补偿的步骤。当电机旋转时,一个测量线圈电流的模拟转换数据的工作被实施。基于模拟转换数据的数据和相关算法,丢步可以被侦测。如果丢步没有发生,模拟转换数据的工作仍会继续,但丢
全文共7061字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[10954],资料为PDF文档或Word文档,PDF文档可免费转换为Word

