英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
基于AIS数据的德克萨斯州东南航道的航道交通分析
Xingwu(a),Aesha L Mehta(a),Victor A.Zaloom(b),Brian N.Craig(b)
摘要
这篇论文利用自动身份识别系统(AIS)数据研究Sabine Neches航道(SNWW)的航道交通。作为美国的能源通道,SNWW是德克萨斯州东南方向最重要的航道。这篇论文的目的有两层:一个是调查SNWW在宏观层面的水路运输的特点(利用整合的AIS数据);而更重要的是,这篇论文目的在于调查船舶碰撞的频率,这反映在SNWW中船舶出事故的风险程度。认识到这两个目的,AIS数据首先应该被清理掉以适应我们的研究需求,并且一个可实现的基于AIS的方法被提出来以评估在SNWW航道中不同类型的船舶事故的频率。这篇论文确定了一系列在SNWW的危险的地方,它们经历了高频率的船舶冲突,尤其在大型船舶和那些运载着危险原材料的船。这篇论文也调查每一天热点事件对船舶冲突频率的影响。这篇论文的发现能帮主研究者和航道管理者更好的理解在SNWW的航行风险。
1.介绍
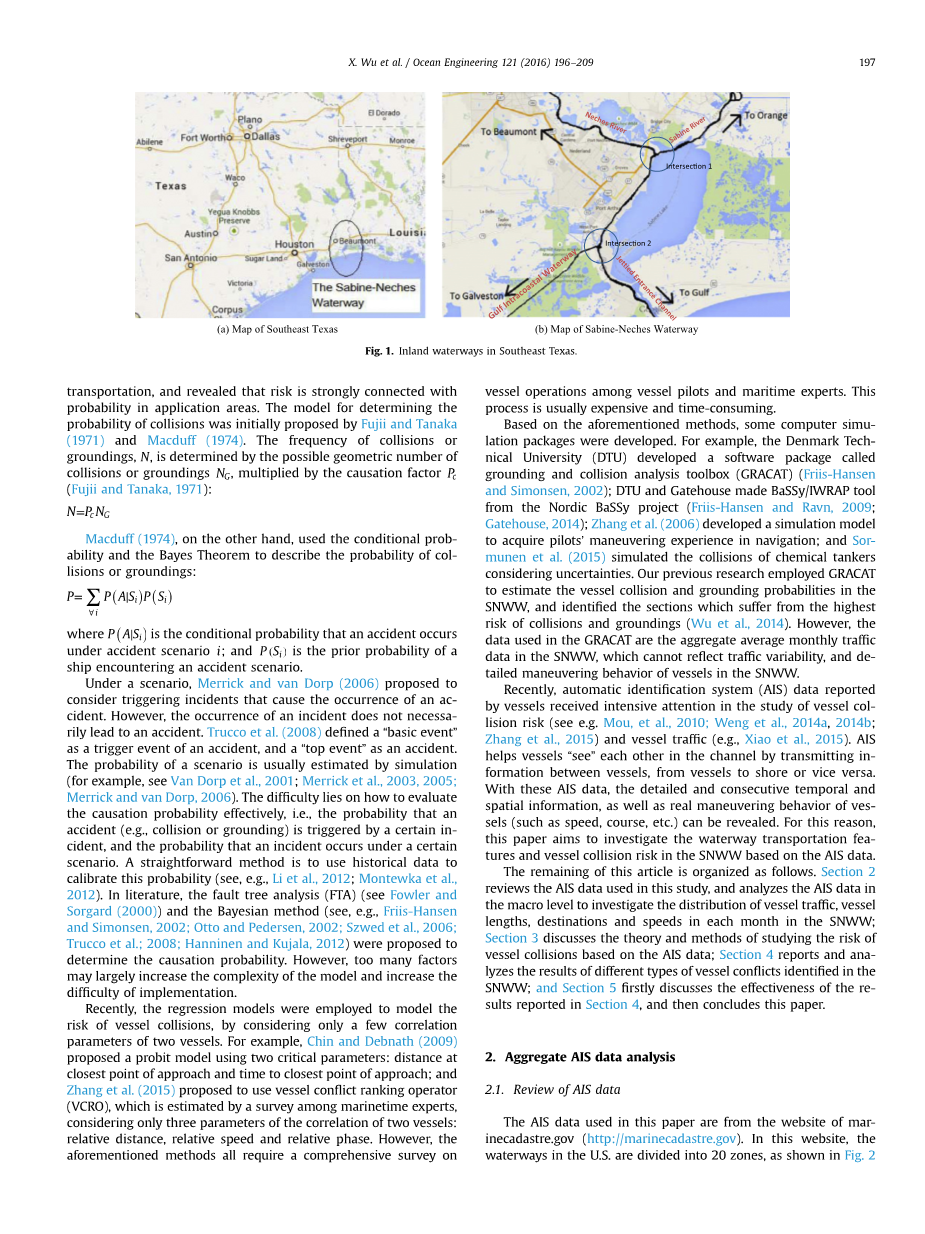
德克萨斯东南因它的密集的石化设施和联络墨西哥湾和几个港口的繁忙的内水交通而闻名(见图1.a)。在这几个港口之间,Beaumont港是美国最繁忙的港口之一。它也是在美国国内最繁忙的军事港口和美国在世界上第二繁忙的军事港口。
德克萨斯东南的主要水路被称为Sabine-Neches Waterway(SNWW),它连接着Beaumont港和Arthura港和Orange港以及墨西哥湾。SNWW为四条炼油厂和沿着水路的许多化工厂提供服务。从2002年到2006年,通过这条航道进口的原油包括美国的12%和西海岸沿岸进口的18%,如(1.b)图所示,SNWW的主要路线是从博蒙特港通过涅希河和喷射入口通道进入海湾。隧道深度为40英尺(12米),Neches河段为400英尺(122米),深度为42英尺(13米),宽500至800平方米(152-244米) 具有通过油轮和其他大型船舶的能力。第二条路线通过萨宾河到达东北部的奥兰治港,深达30英尺(9米)深,宽200英尺(61米)。在西南部,海峡通过海湾内陆航道延伸至加尔维斯敦。SNWW中有两个交点,如图(1.b)所示。在文献中,研究SNWW的水路运输研究较少,特别是安全导航问题。
狭窄水道的安全航行是海事当局和研究人员最关心的问题之一。狭窄水道的船舶事故包括:碰撞,分裂,基础,火灾和爆炸等。注意,分界与碰撞相似,前者表明船只撞到固定物体,后者是指两艘彼此相通的船只 。 在本文中,术语包括在碰撞研究中。
根据历史数据,平均每月有2-3艘船只碰撞/一次搁浅。SNWW的碰撞比地面更危险,因为SNWW的地面主要是软的。 本文重点研究船舶碰撞的风险。船舶事故的发生取决于各种因素。 一般来说,这些因素可以分为五类:几何因素,交通因素,天气因素,船舶设计参数和设备故障以及人为因素。最近,Ozbas和Goerlandt和Montewka回顾了海上运输领域的风险定义,并揭示了风险与应用领域的概率密切相关。
图1.a 图1.b
确定碰撞概率的模型最初由Fujii和Tanaka和Macduff提出。 碰撞次数N,由可能的几何碰撞或基数NG乘以因果因子Pc)确定:N = Pc *NG另一方面,Macduff(1974)利用条件概率和贝叶斯定理来描述合并或理由的概率:P = sum; P ( A Si ) P ( Si )。其中P(A|Si)是在事故情景下发生事故的条件概率; 并且P(Si)是遇到事故情况的船舶的先前概率。
在一种情况下,Merrick和van Dorp提出考虑触发导致事故发生的事件。 不过事件的发生并不必然导致事故。Trucco etal将“基本事件”定义为事故的触发事件,并将“顶级事件”定义为事故。场景的概率通常通过模拟来估计(例如,参见Van Dorp等人,2001; Merrick等人,2003,2005; Merrick和van Dorp,2006)。困难在于如何有效地评估因果关系概率,即事故(例如碰撞或接地)是由某一特定事件触发的概率,以及在某种情况下发生事件的概率。一个简单的方法是使用历史数据来校准这种概率(参见例如Li等人,2012; Montewka等人,2012)。 在文献中,故障树分析(FTA)(参见Fowler和Sorgard(2000))和贝叶斯方法(参见例如Friis-Hansen和Simonsen,2002; Otto和Pedersen,2002; Szwed等人,2006; Trucco 等人; 2008; Hanninen和Kujala,2012)被提出来确定因果关系概率。然而,太多的因素可能会大大增加模型的复杂性,并增加实施的难度。
最近,通过仅考虑两艘船舶的相关参数,采用回归模型来模拟船舶碰撞的风险。 例如,Chin和Debnath(2009)提出了一个使用两个关键参数的概率模型:最近接近点的距离和最近接近点的时间; 和Zhang等 (2015)提出使用船舶冲突排名运营商(VCRO),这是通过对海运专家进行的调查估计的,只考虑两个船舶的相关性的三个参数:相对距离,相对速度和相对相位。然而,上述方法都需要对船只飞行员和海事专家之间的船只作业进行全面的调查。 这个过程通常是昂贵和耗时的。
基于上述方法,开发了一些计算机模拟软件包。例如,丹麦技术大学(DTU)开发了一个软件包,称为接地和碰撞分析工具箱(GRACAT)(Friis-Hansen和Simonsen,2002); DTU和Gatehouse从北欧BaSSy项目(Friis-Hansen和Ravn,2009; Gatehouse,2014)制作了BaSSy / IWRAP工具; 张等人 (2006)开发了一种模拟模型,以获得驾驶员在导航中的操纵经验; 和Sor- munen等人 (2015)考虑了不确定因素模拟化学品船的碰撞。我们以前的研究使用GRACAT来估计SNWW的船舶碰撞和接地概率,并确定了碰撞和接地风险最高的部分(Wu et al。,2014)。 然而,GRACAT中使用的数据是SNWW中的总体平均每月流量数据,其不能反映SNWW中的流量变异性和船舶的详细操纵行为。
最近船舶报告的自动识别系统(AIS)数据在船舶碰撞风险研究中受到重视(参见Mou等,2010; Weng等,2014a,2014b; Zhang et al。,2015)和 船舶交通(如Xiao等,2015)。 AIS通过在船只之间传递信息,从船只到海岸,或通过船只到海岸,帮助船只“看到”彼此。 利用这些AIS数据,可以揭示船舶的详细和连续的时间和空间信息以及船只的真实机动行为(如速度,航向等)。 因此,本文旨在根据AIS数据对SNWW中的水路运输特征和船舶碰撞风险进行调查。
本文的其余部分组织如下。 第2节回顾了本研究中使用的AIS数据,并对宏观层面的AIS数据进行了分析,研究了SNWW每月船舶流量,船长,目的地和速度分布情况; 第3节讨论了基于AIS数据研究船舶碰撞风险的理论和方法; 第4节报告和分析了SNWW中确定的不同类型的船舶冲突的结果; 第5节首先讨论了第4节报告结果的有效性,然后总结了本文。
2.综合AIS数据分析
2.1回顾AIS数据
本文使用的AIS数据来自mar-inecadastre.gov网站(http://marinecadastre.gov)。 在本网站,美国的水道分为20个区域,如图1所示. 2(a)。每个区域收集的AIS数据可以直接下载。SNWW位于15区,其中包括海湾的一部分,密西西比河大部分地区,苏必利尔湖和其他水道。 图2(b)显示了2012年1月收集的所有AIS数据。使用ArcGIS,仅提取了SNWW中收集的AIS数据(因此也将消除SNWW中空间误差的数据) 图. 2(c)和(d)显示了2012年1月SNWW收集的AIS数据。
本文采用2012年每月收集的SNWW中的AIS数据。每条记录(由图2(d)中的点表示)表示船舶的状态:位置(经度和纬度),时间(精确到秒 ),地面速度(SOG),地面(COG),航向,一转(ROT),航行id,船只ID(海上移动业务标识,即MMSI)等。另外, 船只和船只,例如船长,类型,航次目的地和开始时间。
2.2综合数据分析
首先,根据2012年每个月的AIS数据进行综合数据分析,以调查SNWW的水路运输特征。图3显示了2012年每月的交通量分布情况,表1报告了2012年每个月的船舶类型分布情况。注意,在SNWW中携带有害物质的货物和油罐的数量都被具体记录,因为SNWW 为位于德克萨斯州东南部的许多炼油厂和化工厂提供服务。
可以看出,SNWW的船只数量没有大的变化。 最低的是740(4月),最大的是824(8月)。 平均为779,标准偏差仅为27.在这些船舶中,大多数是拖船,占2012年SNWW船舶的60-65%。另一方面,10-15%的船只是油轮, 和4-8%是货物。 据了解,一个月的船舶交通工具中拖船,油轮和货物的比例在一个月间波动很小。 这表明SNWW的流量是相当稳定和常规的。
此外,还研究了2012年每个月SNWW中船舶长度的分布情况,如表2所示。可以看出,长度在20-30米范围内的船舶占最大部分(34-37 %)。 此外,发现65-70%的船只的长度不得超过30米。 这个百分比范围接近每月船只流量的拖船比例(60-65%)。 请注意,由于小型渔船,如渔船,渔船等,其高出约5%(65-70%,60-65%)。另一方面,15-20%的船舶长度超过150米。 这个百分比很好地反映了货物和油轮在SNWW每月船只交通中的比例。
最后,研究了2012年每月SNWW船舶速度分布情况。 可以看出,超过98%的ves-sels速度不超过10节; 约60%的船只的速度不超过5节。 鉴于水路狭窄,这种速度分布是合理的。 这些速度数据将在以下部分用于船舶冲突分析。
图3. 2012年每月SNWW的船舶数量。
3.船舶冲突分析
3.1.船舶碰撞发生的决策
AIS数据揭示了实时状态的船舶,包括位置、速度、航线和方向。这些信息可以让我们探讨空间和时间两个船舶航道之间的关系。在这种情况下,有必要逐条浏览AIS数据。因此,它是微观层面的数据分析。
设i,j分别是两艘船。 定义(xi,yi)和(xj,yj)分别作为时间t时船舶i,j的位置,然后分别设v⃗it,v⃗jt和ai,aj是船舶碰撞的速度和航向。 在文献中,通常基于船只的区域来评估限制水中的船舶碰撞的风险。(例如参见Zhao等人,1993; Pietrzykowski,2008; Wang,2010; Goerlandt和Kujala,2014)
船舶的航行安全域是一个重要的概念,指的是“围绕有效水船的导航器想要避开其他船只或固定对象”(古德温,1975)。船的冲突发生在船舶进入另一个区域(Mou et al .,2010)。船的碰撞频率反映了船舶碰撞的风险。Mou et al(2010) 定义了一个圆形域半径,船的长度是3倍,藤井裕久和田中(1971)定义了一个椭圆域,主要和次要的半径是4和1.6倍的船的长度,分别,Qu et al .(2011)提出了模糊四元数船舶领域。在本文中,我们采用圆形和椭圆域,分别研究SNWW船冲突的频率。图4显示了这两种类型的域。它还展示了船舶的速度,航线和区域。
似乎椭圆域更多地集中在共享相似或相反的路径的船舶之间的冲突,因此它可能更适合于狭窄和直线的通道; 而圆形区域可能更适合于弯曲通道,特别是具有许多交叉点的通道。 这两个功能都可以沿着SNWW找到。 因此,在以下分析中使用了两种类型的域。
理论上,两个船舶之间在时间t时的距离可以作为一个等式计算:
(1)
根据领域理论,Weng et al。 (2014a,2014b)提出了一种基于AIS数据估计船舶碰撞风险的方法:首先,船舶i与船舶j的相对速度(视vt而定)可根据公式 (2):
(2)
然后从vi到vj的相对角度:
(3)
图4.船舶域名示范
相对角度由公式 (3)在0-180°的范围内。 如果theta;ijlt;90°,则意味着两艘船越来越近; 而如果theta;tgt; 90°,则两艘船正在分开。 两个船舶的关系可以在图5中显示。在下文中,船舶j被称为参考船舶,船舶i被认为是周围的船舶。例如,如果参考船舶j正好在相同路线上的周围船舶i的前方,并且它们具有相同的过程,即alpha;i=alpha;j,则| vi | gt; | vj | 导致theta;ij= 0,意味着如果这两艘船没有改变速度或航道,我将会撞到船只j的后方;而|vit| lt;|vjt|导致theta;ij= 180,意味着它们彼此距离更远。另一方面,如果alpha;it=-alpha;jt,则theta;ij= 0°表示两艘船正在相向前进; 否则theta;ij= 180°表示两艘船正向相反方向移动。在时间t,使用船舶j作为参考,如果相对角度表明船只i朝向船只j移动,则可能发生船只冲突。 图6(a)显示了船舶膨胀的发生(Wenget al,2014a,2014b)。 给定短时间间隔Delta;t,if | v⃗ij |∆tgt;Lij,其中Lij定义如下(Weng et al。,2014a,2014b),那么这意味着船舶i将通过点A并进入船舶j的区域内,从而导致船舶冲突
全文共14833字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[145897],资料为PDF文档或Word文档,PDF文档可免费转换为Word

