英语原文共 34 页,剩余内容已隐藏,支付完成后下载完整资料
广义尺度兴趣点的匹配
摘要
基于兴趣点匹配和物体识别方法的性能依赖于底层的兴趣点两者的特性和相关的图像描述符的选择。本文阐述了在这种情况下选择一个稀疏的点集计算图像描述符基于图像的匹配使用广义尺度空间的兴趣点式探测器的优势。在任何给定规模的检测兴趣点,我们利用拉普拉斯nabla;2规范升,黑森州detHnorm L的决定因素和四个新的无符号数黑森州功能强度的措施D1,规范L,~D1,规范L,D2,范数L和~D2,模L,这是通过从第二时刻矩阵的Hessian矩阵概括哈里斯和石和-Tomasi的运营商的定义来定义。
然后,在不同的尺度特征选择是通过从局部极值超过规模衍生物标准化规模尺度选择,或通过连接功能,在规模为特征的轨迹,并从规模以上标准化功能强度的综合衡量计算的意义措施执行。非理论的分析,提出了不同的实体下的图像变形,这些兴趣点基本的稳健性,在仿射下的图像变形或近似不变性其性能方面。无论是旋转对称尺度空间平滑操作的效果,Hessian矩阵的行列式dethnorm L是一个真正的仿射协变微分实体和Hessian特征强度的措施tilde;D1,L和D 1,L从Hessian矩阵的仿射协变行列式的一大贡献,这意味着这些不同实体的局部极值点将图像仿射变形下是更强大的比拉普拉斯算子或Hessian特征强度的措施D2 L局部极值,tilde;D 2、规范L. 它示出了如何将这些广义的空间感兴趣点允许一个较高的比例正确的匹配和较低的比以前已知的感兴趣点探测器在同一个类的假匹配。利用兴趣点规模的链接和与新的Hessian特征强度计算规范措施D1,我得到了最好的结果,tilde;D 1,L和行列式Hessian矩阵的范数l的死亡微分的实体,导致最佳的匹配性能显着透视透视图像变换下,比更常用的高斯拉普拉斯算子,逼近或哈里斯–Laplace算子的差。我们建议,这些广义的空间感兴趣点,伴随着相关的局部尺度不变的图像描述符,应允许更好的性能,基于图像匹配,物体识别和相关的视觉任务的基础上的兴趣点。
关键字:特征检测、兴趣点、规模选择、连接、匹配、目标识别、尺度不变性、仿射不变性、尺度空间计算机视觉
1.介绍
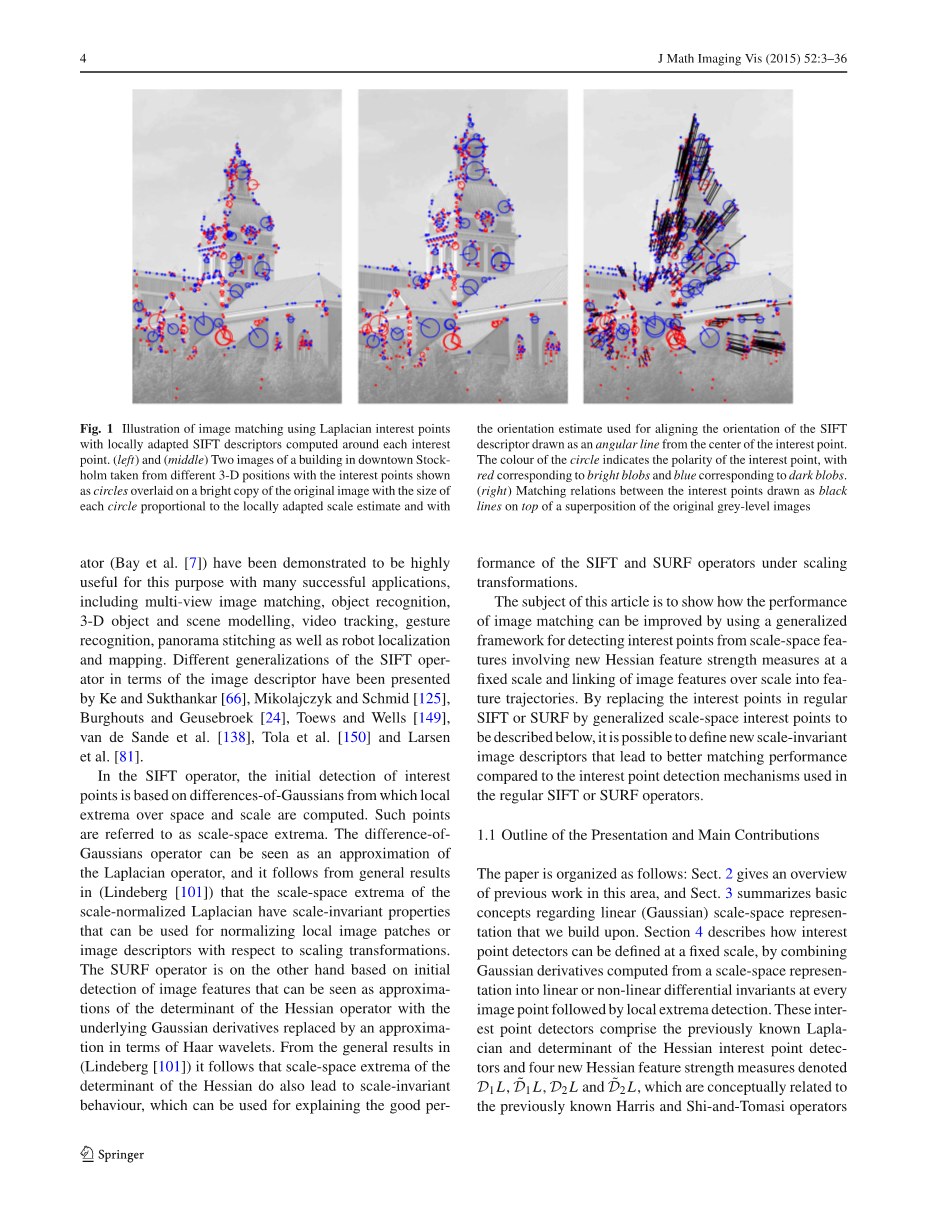
一种常见的基于图像匹配的方法,包括从图像数据的检测兴趣点,计算相关的局部图像描述符的兴趣点,然后建立一个对应关系的图像描述符(见图1的说明)。具体来说,SIFT算子(Lowe [ 119 ])和SURF算子(湾等。7)已被证明是非常有用的用于此目的与许多成功的应用,包括多视图图像匹配,物体识别,三维物体和场景建模,视频跟踪,手势识别,全景拼接以及机器人定位与映射。对SIFT算子在图像描述符不同推广已由Ke和sukthankar [ 66 ],Mikolajczyk和Schmid [ 125 ]和[ 24 ],Burghouts和 Geusebroek,Toews和Wells[ 149 ],van de Sande等人。[ 138 ],Tola等人。[ 150 ]和Larsen等人。[ 81 ]。在SIFT算子,兴趣点的初始检测是基于高斯计算差异的局部极值点在空间和规模。这样的点被称为尺度空间极值。高斯算子的差异可以被看作是一个近似的拉普拉斯算子,并遵循从一般的结果(林德伯格[ 101 ]),规模尺度空间极值标准化拉普拉斯具有尺度不变的特性,可用于对缩放变换局部图像补丁或图像描述规范。SURF算子是基于可以被看作是与底层的高斯衍生物在Haar小波近似Hessian算子代替行列式近似图像特征的初步检测。从总的结果在(林德伯格[ 101 ])这样的Hessian矩阵的行列式的尺度空间极值也导致规模不变的行为,可用于解释的SIFT和SURF算子下的缩放变换的良好性能。
本文的主题是展示图像匹配的性能可以通过使用一个通用的框架用于检测从尺度空间的功能包括新的Hessian特征强度的措施在固定规模的兴趣点和图像特征尺度的特征轨迹连接的改进。通过更换定期筛选或冲浪的兴趣点,通过广义的空间感兴趣点来描述下面,它是可能的,以确定新的尺度不变的图像描述符,导致更好的匹配性能相比,在常规筛选或冲浪运营商使用的利益点检测机制。
1.1概要介绍和主要贡献
本文的组织如下:第二节给出了这方面的前期工作的概述,和第三节总结了线性(高斯)的空间表示,我们建立的基本概念。第四节描述了兴趣点探测器可以在一个固定的尺度定义,结合高斯衍生物从尺度空间表示为线性或非线性微分不变量在每个图像点的局部极值检测计算。这些兴趣点探测器包括先前已知的拉普拉斯和行列式的Hessian的兴趣点检测器和四个新的Hessian特征强度的措施表示d1l,tilde;d 1L,D2L和tilde;D 2L,这在概念上与先前已知的哈里斯和石和托马西算子,定义从Hessian矩阵代替第二矩。
第5节提出了一种理论分析的鲁棒性,这些感兴趣点探测器的图像变形,通过分析的基础上的仿射变换的图像域的基本微分实体的协方差特性。结果表明,Hessian算子的行列式是仿射协变和Hessian特征强度的措施d1l和tilde;d 1L有重大贡献,它是仿射协变。第6节概述了如何将这些兴趣点检测器可以补充的阈值操作,包括(Ⅰ)的阈值值与不同的兴趣点检测器和(二)互补的差异表达的符号的基础上增加的选择性属性的利益点检测器的阈值之间的阈值。第7节介绍了如何将这些兴趣点探测器可辅以规模选择机制,包括先前建立的尺度选择方法的基础上的局部极值点在尺度尺度归一化的衍生物和一种新的方法在图像特征尺度与规模特征轨迹。对于后者,一个新的措施的意义或显着性的利益点被定义为一个积分的尺度归一化的特征强度测量沿每个特征轨迹。有人认为,这样的综合衡量规模可能会提供一个更强大的排名的图像特征,包括他们的生命长度超过规模,从而使其稳定性的意义度量尺度空间。第8节介绍了如何得到的丰富的家庭的广义尺度空间感兴趣点探测器可以补充与当地的图像描述符,导致一个广义的家庭本地适应和规模不变的图像描述符。具体来说,我们定义了高斯-高斯和SIFT和SURF描述子类似于原SIFT。然而,SURF描述子,用兴趣点探测器的广义兴趣点探测器取代和用于计算的而不是金字塔高斯导数项,定义为在原SIFT和Haar小波用于原冲浪做图像描述符的图像测量。
第6节概述了如何将这些兴趣点检测器可以补充的阈值操作,包括
(一)幅度阈值与不同的兴趣点检测器的阈值值之间的正式关系
(二)互补的阈值的基础上的符号的互补的差异表达,以增加感兴趣点检测器的选择性属性。
第7节介绍了如何将这些兴趣点探测器可辅以规模选择机制,包括先前建立的尺度选择方法的基础上的局部极值点在尺度尺度归一化的衍生物和一种新的方法在图像特征尺度与规模特征轨迹。对于后者,一个新的措施的意义或显着性的利益点被定义为一个积分的尺度归一化的特征强度测量沿每个特征轨迹。有人认为,这样的综合衡量规模可能会提供一个更强大的排名的图像特征,包括他们的生命长度超过规模,从而使其稳定性的意义度量尺度空间。
第8节介绍了如何得到的丰富的家庭的广义尺度空间感兴趣点探测器可以补充与当地的图像描述符,导致一个广义的家庭本地适应和规模不变的图像描述符。具体来说,我们定义了高斯高斯和SIFT和SURF描述子类似于原SIFT和
然而,SURF描述子,用兴趣点探测器的广义兴趣点探测器取代和用于计算的而不是金字塔高斯导数项,定义为在原SIFT和Haar小波用于原冲浪做图像描述符的图像测量。
第9节的计算结果与相关的高斯图像描述符的图像匹配所得到的广义兴趣点的性能。结果表明,规模的连接可能会导致更好的选择图像特征相比尺度空间极值检测,那newhessian特征strengthmeasuresd1l,tilde;d 1L和Hessian矩阵的行列式优于Laplacian算子,其高斯近似或哈里斯–Laplace算子的差。10节表明方法可以延长光照不变性。最后,11节与12节的结论与总结和讨论。
2.相关工作
在前期工作中,Marr和他的合作者Hildreth [ 121,122 ]提出了早期原始草图表示图像数据从边缘、酒吧、斑点和终端的定义从拉普拉斯零交叉点作为图像特征的主要类型。这样的特征及其对高斯差,过零点逼近然而,存在着固有的问题。如果用于边缘检测,他们可能会产生“假边缘和弯曲的边缘或角落,会产生大量的定位误差。
今天,我们已经进入了一个更发达的理论,早期的视觉操作,这使我们能够制定一个更丰富,也更明确的词汇的局部图像特征。对于一个良好的运作原理检测的鲁棒图像特征从现实世界的图像数据发展的一个重要基石是由使用尺度空间表示的多尺度图像数据提供的框架,最初提出bywitkin [ 157 ]和Koenderink [ 69 ]。Koenderink提出链接图像的特点,利用等层次,这个想法是由利弗席兹和Pizer [ 86 ]和[ 48 ] Gauch和Pizer拾起,谁开发了粗的医学图像精细分割系统。
一个主要的问题,当连接图像特征的尺度上的基础上的国际标准化组织的强度,但是,是强烈影响的强度值的局部图像特征的高斯平滑操作。为了避免这种问题,中心[ 90 ]认为连接局部极值和鞍点在尺度和定义相关概念的灰色斑点在任何单一尺度的斑点在尺度空间。在尺度空间生命的长度和这些结构的程度进行测定,从而表示称为尺度空间的原始草图,和意义的图像结构,这些链接对象的尺度空间占据四维容积。通过实验,发现得到的尺度空间的原始草图允许提取凸像斑点的图像结构以及规模水平处理这些在一个纯粹的自下而上的方式。
图像的多尺度结构forwatersheds梯度的大小密切相关的概念是由连接奥尔森[ 129 ]的医学图像分割的应用。在尺度空间的原始草图的医疗应用程序已经开发了用于分析脑功能激活图(Lindeberg等人。[ 117 ],Coulon et al.。[ 29 ],rosbacke等人。[ 136 ],文俊等人。[ 120 ])和捕获的皮质表面的折叠模式(卡夏等人。[ 25 ])。更多的算法工作在不同尺度上的斑点和脊特征的建筑图是由克劳利和他的同事[31,32]使用从金字塔定义的低通特性不同了;因此非常密切的相似之处,因此对高斯拉普拉斯算子。
从图像数据的局部特征检测的范围内,无论是哈里斯[ 55 ]和F和Gouml;rstneruuml;LCH [ 45 ]提出的角点检测算法定义的第二矩。的痕迹或Hessian矩阵的行列式的早期应用,运营商提出了成都国际[ 9 ]和BLOB从拉普拉斯反应定义特征作为福尔希斯和Poggio [ 153 ]和布洛斯坦和Ahuja [15,16]纹理分析原语。研究bykitchen和罗森菲尔德[ 68 ]是基于不同水平曲线的曲率变化的角点检测,dreschler和内格尔[ 40 ],Koenderink和理查兹[ 70 ] [ 128 ],高贵,Deriche和基拉奥当[ 39 ],布洛姆[ 14 ],brunnstrouml;M等人。[ 23 ]和[ 91 ]中心。在许多情况下,这些运营商是联合高斯平滑步骤,有时出于降低噪声影响的需要。今天,我们将把这些运算符称为单尺度特征检测器。实验结果,但是,往往透露了大量缺乏鲁棒性,由于需要手动选择的规模水平和缺乏一个内置的规模选择机制。
执行尺度的选择,相对于空间和规模gamma;归一化导数计算的局部极大值检测图像特征的总体思路,导致理论上可证明的尺度不变性,在中心[ 93,95 ]发起并在中心[ 100101 ]然后精制。具体而言,尺度不变的BLOB探测器从拉普拉斯或Hessian矩阵的行列式和尺度不变性角点检测从调整水平曲线曲率尺度空间极值提出。这种方法适用于尺度不变特征跟踪(布雷兹纳和林德伯格[ 21 ]),局部模式分类(wiltschi等人。[ 156 ]),为地球的物体识别的图像特征提取(Lindeberg和李[ 116 ]),指纹分析(Almansa和林德伯格[ 3 ])和实时手势识别(布雷兹纳等人。[19,20])。教程概述的基本尺度空间框架部分可以在林德伯格[ 94,98,102,103,107,111 ]发现。
利用规模化的选择,从局部极大值的尺度上的标准化衍生工具的计算尺度不变的高斯衍生工具的描述物体识别。洛[ 118119 ]提出了一种基于局部位置相关的直方图计算从不同的高斯尺度空间极值确定位置和尺度的物体识别系统,因此非常接近于拉普拉斯尺度空间极值尺度不变的斑点检测的相似之处。密切相关的目标识别方法,但使用不同的图像描述符,已由Lazebnik等人提出的。[ 82 ]和[ 66 ]柯和sukthankar。海湾等。[7,8]开发出另一种,相反,可以看作是对Hessian特征在Haar小波表示行列式近似图像特征的方法。奥佩尔特等人。[ 130 ]提出了一种目标识别方法,结合不同类型的兴趣点,具体差异特征和哈里斯点高斯。Kokkinos et al.。[ 74 ]利用一种基于原始草图特征的相关方法,用于缩放不变的边缘和脊特征。Kokkinos和Yuille [ 75 ]提出了另一种计算的尺度不变的图像描述符的方式,通过一个基于凹尺度空间模型的对数极坐标域显式搜索(怀特和福洛拉克[ 113 ])。
一种基于组合规模不变的拉普拉斯斑点和尺度脊特征的手势识别实时系统在布雷兹纳等人提出的。[19,20]基于同步跟踪和使用尺度不变特征的识别方法(拉普捷夫海和林德伯格[ 79 ])。基础理论的实时尺度选择基于混合金字塔表示当时林德伯格和布雷兹纳[ 112 ]报道。对尺度选择实时实现并行发展,已由克劳利和段子[ 30 ]和[ 119 ]的洛。由于尺度不变的性质的规模选择步骤,所有这些视觉模块成为规模不变,这使得它们能够自动适应和处理不同大小的图像结构。具体而言,基于局部极值点在尺度规模选择标准化衍生品构成的理论基础为尺度的物体识别基于SIFT或冲浪。
该方法基于最大化gamma;尺度不变脊检测标准化措施的脊强度(林德伯格[ 97100 ])扩展到了Sato等三维图像。[ 139 ],Frangi等人。[ 46 ]和krissian等人。[ 76 ];又见克尔巴什和郭[ 67 ]为血管提取技术综述。多尺度脊检
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150442],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

