英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
基于android系统的关于四旋翼直升机的姿态控制的飞行指挥和用最佳调优设计
摘要
本文提出了基于android系统的手机平台的研究和开发,这个平台有四旋翼直升机控制和四旋翼直升机飞行控制器。提出的基于android的手机平台具有以下优势:(1) Android远程控制器具有双向传输功能,它可以传输四旋翼直升机和飞行指令收到的反馈信息来实现预期的控制。此外,安卓遥控器是设计在一个移动平台,方便携带。(2)飞行控制器采用比例-积分-微分控制和滑模控制方法以获得最佳操作。最后,优化控制参数利用遗传算法和禁忌搜索算法建立和实现。实验结果提出了验证的性能和可行性的建议基于机器人的与旋翼控制旋翼飞行控制器的移动平台。
关键词:四旋翼;学术期刊;安卓系统;手机平台;PID控制;滑模控制;遗传算法;
- 引言
四旋翼的概念提出很久以前,为无人飞行器(UAV)受到越来越多的关注,
相关文献已提出[1,2]。为进一步发展,大量的研究集中在姿态控制和定位[ 3,4 ]。通过改变电压输出和推进器来实现姿态控制。使用不同的控制姿态或位置控制策略,提出了5–[ 13 ],如自适应控制[14,15],反馈控制,滑动控制模式控制[ 16 ],模糊滑模控制等,以期对机体发出指令,并增加功能,以前的研究已经使用了独立的远程控制。本文设计了一个远程控制器使用安卓操作系统的移动平台。飞行控制器的使用与控制和滑模控制方法获得稳定化操作。有许多工程优化算法,并元启发式算法抽动为获得充分的解决方案提供性能。遗传算法(GA)和禁忌搜索算法[ 17 ]。GA[ 18,19 ]是由一个随机搜索方法模拟自然界中生物繁殖的遗传特性。GA在不同环境中产生染色体来模拟不同的生物学特性。然而,有一个问题,快速收敛到GA采用禁忌搜索算法解决这一问题的应用程序的一个局部最优解。禁忌搜索法和传统的搜索方法的主要区别是,它使用它的机制,以避免得到局部最优解,得到全局最优解。遗传算法和禁忌搜索算法的特点。
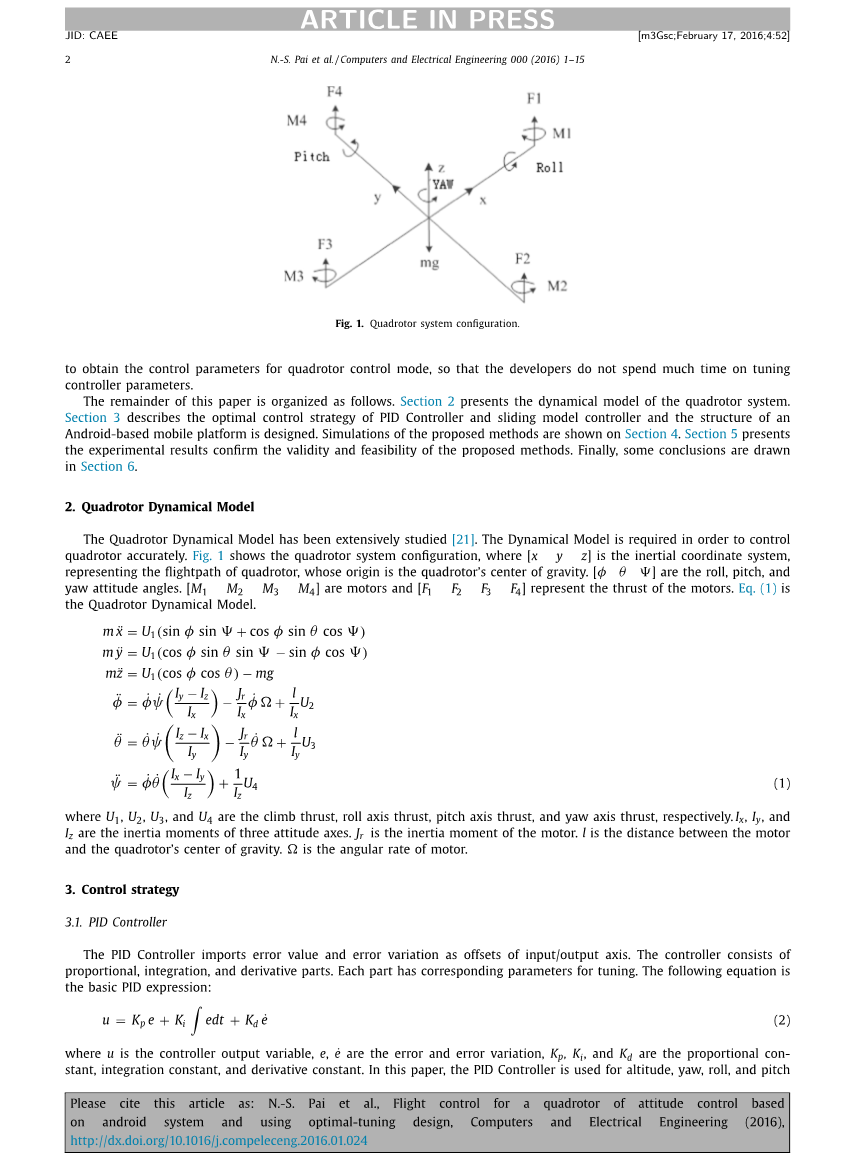
图1旋翼系统配置
本文的其余部分组织如下。第2节介绍了旋翼系统的动力学模型。第3节介绍了控制器和滑模控制器的最优控制策略和结构和基于安卓移动平台的设计。第4节提出模拟显示的方法。第5节提出实验结果证实了所提出的方法的有效性和可行性。最后,第6节得出一些结论。
2. 四旋翼无人直升机动力学模型
旋翼动力学模型已被广泛的研究[ 21 ]。为了控制的动力学模型是必需的四旋翼准确。图1显示了旋翼系统的配置,在[ x y z ]是惯性坐标系,代表了四旋翼飞行器的飞行,其来源是旋翼的重心。[phi;theta;? ]是的,俯仰偏航姿态角。[M 1 M 2 M 3 M 4 ]是发动机和[F 1 F 2 F 3 F 4 ]代表发动机的推力。方程(1)是旋翼动力学模型。
其中U1、U2、U3、U4分别为为爬升推力、滚轴推力、俯仰轴推力、偏航轴推力。IX,IY和IZ,分别为三姿态轴的惯性矩。I是电机的惯性力矩。我是电机和旋翼的重心之间的距离。是电机的角速度。
3.控制策略
3.1.PID控制器
PID控制器导入误差值和误差变化作为输入输出轴的偏移量。控制器由比例,集成和衍生产品。每一部分都有相应的调整参数。下面的方程是PID控制器的基本表达式:
其中u是控制器的输出变量,E,˙E是误差和误差变化,K P、K I、K D是比例常数、积分常数,常数和衍生物。在本文中,该控制器是用于高度,偏航,滚动和俯仰控制,从而
在psi;RZ,R,R,Rphi;,theta;分别是高度期望,偏航的期望,卷的期望,和沥青的期望。
图2 MATLAB/simulink旋翼模型
3.2滑模控制器
滑模控制器是一种非线性控制系统[22]。它对系统参数和外部干扰的变化具有抵抗力。因此,它可以有效地控制系统的不确定性,给系统高性能和快速响应。滑模控制器的设计中定义的滑动面。该滑动面分为三个部分:S>0,Slt;0和Sequiv;0。其目的是使系统在规定的时间内到达滑模面,使系统的Sequiv;0上的滑动表面,达到稳定。考虑到它的滞空时间长和控制器推导的复杂性,方程(1)就达到了下列效果:
然后我们可以得到方程(6)。在beta;和ɛ是大于0的常数,最后得到的变桨控制器输入。
3.3遗传算法和禁忌搜索算法
设计一个控制器需要设置不同的参数,这在过去通常是由专家的经验规则或复杂的计算。本文采用一种优化算法和一个精确的数学模型来获得参数。该系统被简化为图四中的2个区块。控制和滑动模式控制子系统在图中显示在图3和图4中。控制器块代表旋翼系统的电流控制器,在不同的参数可以进入调整飞行结果。运动阻滞的基础上,旋翼系统将使用电动机的特性。噪音块与旋翼系统模拟的外部干扰,是目前各种阵风干扰模拟旋翼系统的稳定性。旋翼动态转换旋翼动态模型的数学表达式为模拟块,和旋翼的特点是通过MATLAB仿真。本文利用遗传算法与启发式禁忌禁忌列表结合设计;其流程图如图5所示。初始设置包括基因剂量,基因长度,基因内容初始化、数量的递归,等等。通过对模型模拟数据的分析计算,得到隶属度函数。选择是基于轮盘赌轮选择,适用于交叉的基因随机选择,并具有较高的隶属度的基因可以获得更高的选择性。之后,实现交叉和新基因的随机两点交叉和突变。新基因与禁忌表相比,避免复发,花费额外的时间,记录数据。停止条件设定为递归的次数;会员等级后执行到停止条件是达到计算。
图3 PID子系统
3.4.Android平台的设计
在本文中,Android远程控制器与旋翼通过蓝牙。Android远程控制器发出指令到旋翼在20Hz的传输频率,而接收端是一个中断子程序。信号在传输过程中难以避免干扰,因此为了避免干扰产生的信号,将传输的数据进行编码和解码,如图6所示。在发送之前,数据提供的标题代码和确认代码。标题码为平台号,确认码为低阶和。
4. 仿真结果
图7显示了所设计的安卓控制界面。红盒子是蓝牙选项按钮,启动开关;
绿色方块是关闭开关;黄色方块是水平和高度控制;蓝色方块是即时反馈;紫色的盒子是特殊的状态反馈,橙色的盒子是蓝牙选项。图8是我们使用的安卓设备。图9(一)显示了手动调谐参数。图9显示了遗传算法和禁忌搜索算法所获得的参数。可以观察到最终的结果仍然收敛到所分配的高度,但有一个差距相比,图9(乙)。图10显示了控制器的姿态。垂直轴为高度(米),水平轴为时间(秒)。图11显示了滑模控制器的姿态。垂直轴的角度(度)和水平轴是时间(秒)。
图4 SMC子系统
图5遗传算法和禁忌搜索算法流程图
图6安卓遥控器的接收功能
图7 Android控制接口
5. 实验结果
在本文中,我们的实验平台通过蓝牙连接到一个平板电脑(见图12)。飞行控制板由支持板和微控制器组成,如图13所示。该组件是蓝牙模块(dfrobot
蓝牙V3),惯性测量单元gy-80,并重新启动按钮,从左到右上支板。上述所有
在支撑板的元素会导致单片机接收飞行器期望姿态反馈信息。图14所示的详细路线图。图15显示了Arduino Mega 2560采用作为系统的微控制器。在我们的平台有四个马达提供运动的动力,这是无刷450 kV的大小电机加在图16所示。
图8 Android装置
图9 (a) 高度位置行为
图9 (b) 高度位置行为
图10.PID控制态度的表现
图11. 滑模控制器的姿态行为
图12四旋翼无人直升机实验平台
图13支持板
图14支持板的路线图
图15巨型microcontroller Arduino 2560
图16无刷电机
图17PID的态度
图18误差控制辊
图19PID的螺距误差
图20 CMS的态度
图21CMS的滚动误差
图22CMS的螺距误差
PID和SMC的旋翼系统稳定的实验和仿真控制器。无花果。图17和图
20分别为目前的PID和SMC的欧拉角。8秒后,PID的角度范围在SMC的角度在正负一度的角度范围中变化。图18,图19,图21,和图22显示SMC控制器,它可以快速响应发生错误时。根据图中所显示的结果。图17到图22,SMC控制器的反应优于PID控制器,应视为最佳选择。
6. 结论
在本文中,与旋翼控制旋翼飞行控制器已建成完全的旋翼系统的结构。为了使顺利操作,并获得所需的测量信号从微控制器,建议安卓移动平台实现了一个双向传输功能,用安卓遥控器。因此,基于Android的移动平台可以发射飞行指令的旋翼和接收反馈信息,实现预期的控制。此外,建议的飞行控制器的设计与控制和滑模控制方法,以执行正确的平衡,并获得最佳操作。实验结果验证了基于安卓系统的姿态控制的优化调整设计。
参考文献
[1] Phang SK, Cai C, Chen BM, Lee TH. Design and mathematical modeling of a 4-standard-propeller (4SP) quadrotor. In: Proceedings of IEEE world
congress on intelligent control and automation (WCICA); 2012. p. 3270–5.
[2] Lin Y, Hyyppauml; J, Jaakkola A. Mini-UAV-Borne LIDAR for fine-scale mapping. IEEE Geosci Remote Sens Lett 2011;8(3).
[3] Dierks T. Neural network output feedback control of a quadrotor UAV. In: Proceedings of IEEE conference on decision and control cancun; December
2008. p. 9–11.
[4] Romero H, Salazar S, Lozano R. Real-time stabilization of an eight-rotor UAV using optical flow. IEEE Trans Robot 2009;25:809–17.
[5] Tayebi A, McGilvray S. Attitude stabilization of a VTOL quadrotor aircraft. IEEE Trans Control Syst Technol 2006;14:562–71.
[6] Symington A, Waharte S, Julier S, Trigoni N. Probabilistic target detection by camera-equipped UAVsk. In: Proceeding of IEEE international conference
on robotics and automation (ICRA); 2010. p. 4076–81.
[7] Marczyk B, Lynch AF. Integration of a triaxial magnetometer into a helicopter UAV GPS-aided INS. IEEE Trans Aerosp Electron Syst 2012;48(4):2947–60.
[8] Sanchez EN, Becerra HM, Velez CM. Combining fuzzy, PID and regulation control for an autonomous mini-helicopter. Inf Sci 2007;177(10):1999–2022.
[9] Lin F, Dong X, Chen BM, Lum K-Y, Lee TH. A robust real-time embedded vision system on an unmanned rotorcraft for ground target following. In:
Proceeding of IEEE transactions on industrial electronics; 2012. p. 59.
[10] Heidarian M, Memon AY. Attitude Control of VTOL-UAVs. In: Proceeding of UKACC international conference on control; 2012. p. 363–8.
[11] Zhang R, Quan Q, Cai K-Y. Attitude control of a quadrotor aircraft subject to a class of time-v
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152906],资料为PDF文档或Word文档,PDF文档可免费转换为Word

