英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
一种新的基于DSP的非正弦电源电压条件下谐波和无功功率优化算法
摘要
本文提出了一种简单的并联有源滤波器控制算法,用于在非正弦电源电压条件下补偿谐波和无功功率。在非正弦供电条件下,任何实现单位功率因数的尝试都会产生非正弦电流,从而增加总谐波失真(THD)。另一方面,由于电压波形中存在谐波,尝试获得无谐波电流可能不会产生单位功率因数。所提出的算法使用拉格朗日乘数技术优化了这种权衡并实现了最佳折衷。它不采用通常使用的p-q理论,适用于单相和三相系统。利用所提出的技术,可以获得满足指定THD限制的优化功率因数。该算法已在各种电源和负载条件下使用MATLAB仿真进行了测试,并使用基于DSP TMS320LF2407A的实验原型进行了验证。
关键词:有源滤波器,数字信号处理器(DSP),谐波失真,非线性系统,优化,功率因数,无功功率
1介绍
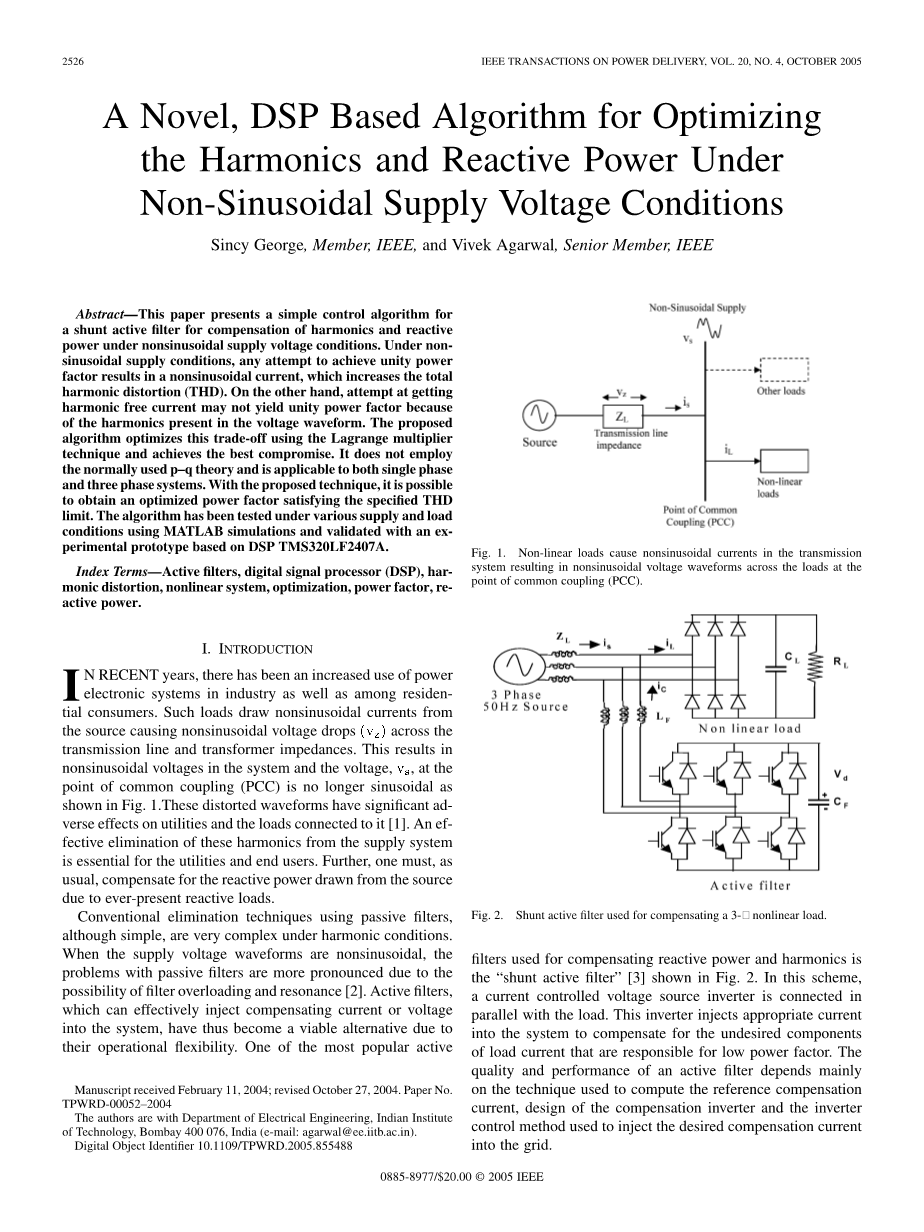
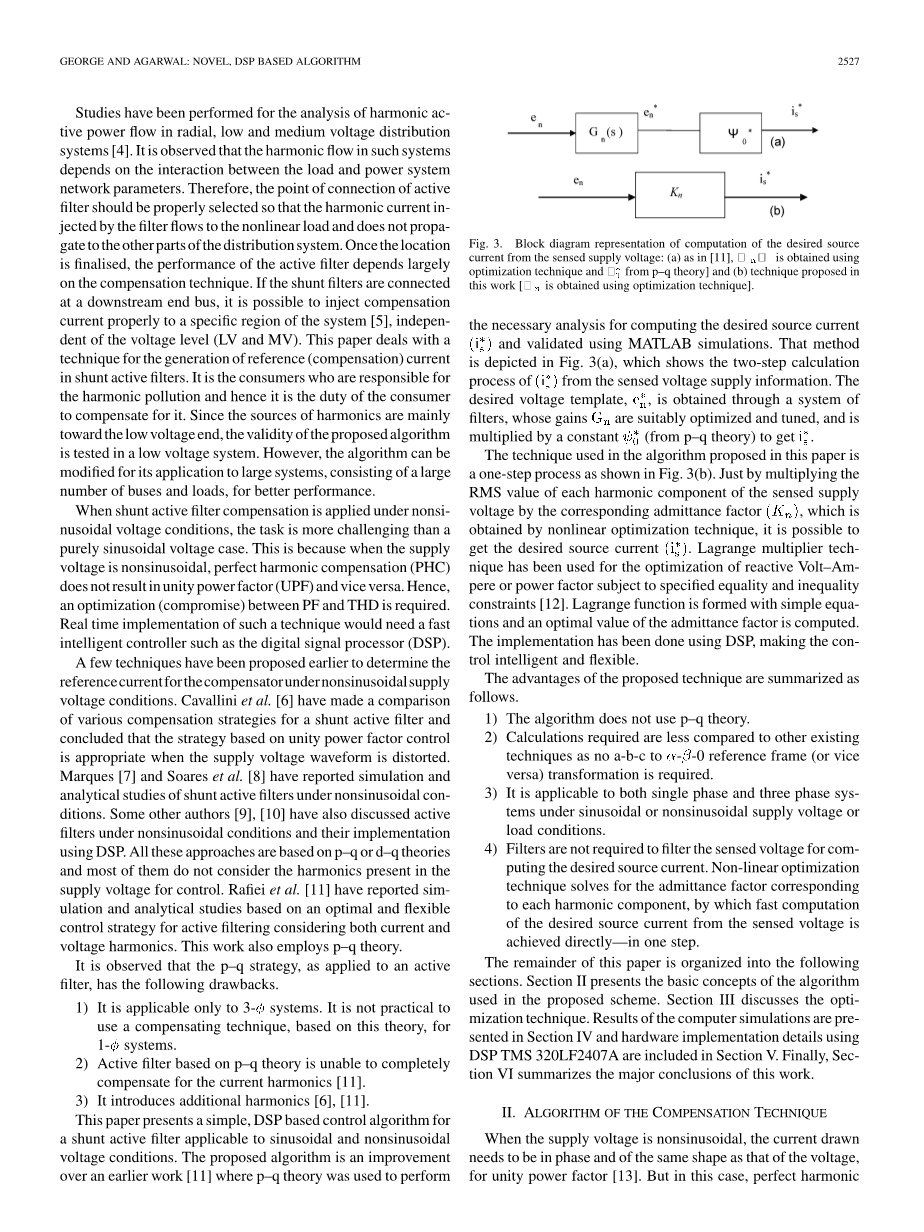
近年来,电力电子系统在工业和住宅消费者中的使用越来越多。这样的负载从源引出非正弦电流,在传输线和变压器阻抗上产生非正弦电压降 。这导致系统中的非正弦电压和电压,在公共耦合点(PCC)不再是正弦曲线,如图1所示。这些失真的波形对公用设施和与之相连的负载有显着的不利影响。[1].从供应系统中有效消除这些谐波对于公用事业和最终用户至关重要。此外,通常必须补偿从电源汲取的无功功率由于永远存在的无功负载。使用无源滤波器的常规消除技术虽然简单,但在谐波条件下非常复杂。当电源电压波形为非正弦波时,由于滤波器过载和谐振的可能性,无源滤波器的问题更加明显[2].因此,由于其操作灵活性,可以有效地将补偿电流或电压注入系统的有源滤波器成为可行的替代方案。其中最受欢迎的活跃用于补偿无功功率和谐波的滤波器是“并联有源滤波器”[3]在该方案中,电流控制电压源逆变器与负载并联连接。该逆变器向系统注入适当的电流,以补偿负责低功率因数的负载电流的不需要的分量。有源滤波器的质量和性能主要取决于用于计算参考补偿电流的技术,补偿逆变器的设计以及用于将所需补偿电流注入电网的逆变器控制方法。
图1.非线性负载在传输系统中产生非正弦电流,导致在公共耦合点(PCC)的负载上产生非正弦电压波形
图2.用于补偿3-4非线性负载的分流有源滤波器
图3.从感测的电源电压计算所需源电流的方框图
已经进行了研究以分析径向,低压和中压配电系统中的谐波有功功率流[4]. 观察到这种系统中的谐波流量取决于负载和电力系统网络参数之间的相互作用。因此,应适当选择有源滤波器的连接点,以便滤波器注入的谐波电流流向非线性负载,而不会影响其他部分的分布系统。一旦完成定位,有源滤波器的性能很大程度上取决于补偿技术。如果分流滤波器连接在下游端总线上,则可以将补偿电流正确地注入系统的特定区域[5], 独立于电压水平(LV和MV)。本文讨论了在并联有源滤波器中产生参考(补偿)电流的技术。负责谐波污染的是消费者,因此消费者有责任对其进行补偿。由于谐波源主要面向低压端,因此在低压系统中测试了所提算法的有效性。但是,该算法可以修改为适用于大型系统,包括大量总线和负载,以获得更好的性能。
当在非正弦电压条件下应用并联有源滤波器补偿时,该任务比纯正弦电压情况更具挑战性。这是因为当电源电压为非正弦波时,完美谐波补偿(PHC)不会产生单位功率因数(UPF),反之亦然。因此,需要PF和THD之间的优化(折衷)。这种技术的实时实现需要快速智能控制器,例如数字信号处理器(DSP)。早先已经提出了一些技术来确定补偿器现代的参考电流,以确定电压条件。卡瓦利尼等人。[6] 对并联有源滤波器的各种补偿策略进行了比较,得出结论:当电源电压波形失真时,基于单位功率因数控制的策略是合适的。马克斯[7] 和Soares等人。[8] 已经报道了非正弦条件下并联有源滤波器的模拟和分析研究。其他一些作者[9], [10] 还讨论了非正弦条件下的有源滤波器及其使用DSP的实现。所有这些方法都基于p-q或d-q理论,并且大多数方法不考虑电源电压中存在的谐波用于控制。Rafiei等。[11]已经报道了基于最佳和灵活的有源滤波控制策略的仿真和分析研究,同时考虑电流和电流电压谐波。这项工作也采用了p-q理论。
观察到应用于有源滤波器的p-q策略具有以下缺点。
1) 它仅适用于 系统。基于该理论,对于1- 系统使用补偿技术是不实际的。
2) 基于p-q理论的有源滤波器无法完全补偿电流谐波
3) 它引入了额外的谐波[6],[11].
本文介绍了一种基于DSP的简单控制算法,用于适用于正弦和非正弦电压条件的并联有源滤波器。所提出的算法是对早期工作的改进[11] 其中p-q理论被用来执行计算所需源电流 的必要分析,并使用MATLAB仿真进行验证。该方法在图3(a)中示出,其示出了来自感测的电压供应信息的 的两步计算过程。期望的电压模板 通 过滤波器系统获得,其增益 被适当地优化和调谐,并且乘以常数 (来自p-q理论)得到。
本文提出的算法中使用的技术是一步过程,如图3(b)所示。仅通过将感测的电源电压的每个谐波分量的RMS值乘以通过非线性优化技术获得的相应的导纳因子,就可以获得期望的源电流 。拉格朗日乘数技术已被用于优化反应伏安或功率因数,受特定的等式和不等式约束[12]. 利用简单方程形成拉格朗日函数,并计算导纳因子的最佳值。使用DSP完成了实现,使控制更加智能和灵活。
所提出的技术的优点总结如下。
1) 该算法不使用p-q理论。
2) 与其他现有技术相比,所需的计算较少,因为不需要abc到 -0参考帧(或反之亦然)变换。
3) 它适用于正弦或非正弦电源电压或负载条件下的单相和三相系统。
4) 滤波器不需要过滤检测到的电压以计算所需的源电流。非线性优化技术解决了对应于每个谐波分量的导纳因子,通过该导纳因子,可以在一个步骤中直接实现从所感测的电压快速计算所需的源电流。
本文的其余部分分为以下几节。第二节介绍了所提方案中使用的算法的基本概念。第三节讨论了优化技术。计算机模拟的结果在第IV节中介绍,使用DSP TMS 320LF2407A的硬件实现细节包含在第V节中。最后,第VI节总结了这项工作的主要结论。
2补偿技术的算法
当电源电压为非正弦波时,电流消耗对于单位功率因数,需要与电压的相位和形状相同[13].
但在这种情况下,完美的谐波赔偿是不可能的。为了获得完美的谐波补偿,从源获得的电流应该是完美的正弦波。但这并不会产生统一的功率因数。因此,在实现单位功率因数与可以消除电流谐波的程度之间存在折衷。由于两个参数都很重要,因此必须找到最佳折衷方案(最佳)。通过使用最优策略,我们可以根据某些约束优化功率因数。
让非正弦电源电压产生非线性负载。可以证明,电压将包含一组谐波分量,其产生相同频率的负载电流和另一组分量,其不会产生相应的负载电流分量。此外,由于其非线性,让负载电流还包含一组电流分量,在电源电压中没有相应的频率分量。电压和电流的对应表达式可写为[13]
其中是电源电压的任意角度,是电流的谐波分量的相角。此外,和求和不会在任何一组谐波分量中进行输入步骤。对于单位功率因数,所绘制的电流必须与源电压同相,并且与源电压具有相同的形状,即和谐波的电流和电压应该是相同的顺序,并且它们的比率应该相等。但是,在这种情况下,THD可能不在可接受的限度内。通过调节谐波比,可以改善THD,但功率因数可能会恶化。因此,需要优化。
为了获得最佳功率因数,从(2)获得所需源电流的表达式,通过设置并注意它应具有与电源电压相同的谐波次数。
其中且是控制变量,定义为第阶电流和电压谐波分量的比率,被识别为第阶补偿负载的导纳。换句话说,是系统从供给侧到负载侧的等效导纳。这相当于负载的等效导纳和分流有源滤波器。所提出的算法的关键是通过控制,可以控制和优化功率因数和THD。是基于电源电压和所需电流的每个谐波分量的RMS值计算的,其必须“平衡”并且与补偿后的电压“同相”。A的计算方式是,只有负载所需的平均功率在供电的每个阶段均匀分配。因此,的序列成分不会出现。 然而,如果电压不平衡,则控制变量可以具有正,负和零序列分量。然而,本文假设平衡电压和电流。最合适的值是通过使用第3节中描述的优化技术计算的。参考补偿电流由给出,其中是负载电流。
3优化技术
拉格朗日乘数技术[14]用于优化反应伏安的非线性方程受均等和不等式约束。负载所需的功率被视为等式约束和THD限制[15]作为不平等约束。该技术表明增强的拉格朗日函数可以写成
其中是目标函数,表示等式约束,表示不等式约束。并且和是未知数量。
L的约束局部最小值的必要条件是其关于其变量的导数应为零。由于不平等约束也存在,Kuhn-Tucker[14]必须满足条件。
A目标函数
设V是由(1)表示的电压的均方根值,是由(3)表示的电流的均方根值。对于给定的有功功率,可以通过最小化总视在输入功率来改善功率因数。因此,目标函数被构造为
其中谐波和已经组合并且为了方便起见用“n”表示。
用代替,用定义目标函数,得到
应用优化以使与控制变量最小化,从而使功率因数最大。
B平等约束
当电压和电流之间的位移角为零时,瞬时有功功率的平均值由下式给出
源电流的计算方式是,它应仅提供补偿后负载所需的瞬时有功功率的平均值。补偿电路提供负载所需的剩余电力。因此,作为函数的等式约束可以写成
C不等式约束
让电流的THD限制在,然后,作为的函数的不等式约束被计算为
D拉格朗日函数
目标是最小化由(6)给出的等式约束的,由(8)定义的和由(11)定义的不等式约束。增广函数L由下式给出
其中和是未知数量。
受约束的局部极小值L的必要条件是
其中 和 是考虑的谐波次序
通过求解(13)—(16),获得,以获得在可接受的电流THD内的最佳功率因数。和是在目标函数的相对最小值处满足的Kuhn-Tucker条件。
计算补偿电流的完整流程图如图4所示。通过对电源电压和负载电流进行离散傅里叶变换(DFT),计算每相中电压和电流的每个谐波分量的RMS值。 通过考虑多个基本周期的采样数据,也可以检测到间谐波分量[16]。但是,本文不考虑这些因素。 为了补偿无功功率,产生“期望的”源电流,其方式是存在于其中的每个谐波分量的顺序与电源电压中的相应分量同相。 该电流的大小取决于负载所需的平均功率和电流的THD限制。
负载消耗的平均功率是电压,电流和它们之间角度的余弦的类似谐波分量的RMS值的乘积。 由电压和电流的不同分量消耗的平均功率为零。在所提出的技术中,由于(1)给出的电源电压和(3)给出的期望源电流是同相的并且具有相似的谐波分量,所以在每个阶段由电源提供的功率是相应的电源电压和电流的类似谐波分量的RMS值的乘积。的计算基于该解释。
一旦知道,就用控制变量获得L的表达式,其中是可以设置为任何值的谐波次序。的最大值取决于电压中存在的最高谐波次数。在本文中,的最大值取为20.然而,可以容易地修改程序以确定电压中存在的谐波分量的最高主要值,并且可以将设置为该值以便更好地控制。但是,较高的值会降低技术实施的速度。通过求解(13)-(16)得到的的值,使用Newton Raphson技术确定所需源电流的每个谐波分量的大小。因此,用于可接受的电流THD的所需源电流的形状取决于导纳因子通过对频域值执行逆DFT来获得期望源电流的原始时域信号。通过从负载电流中减去期望的源电流来获得参考补偿电流。该参考电流补偿无功功率和谐波功率。
4仿真结果
为验证前面章节中介绍的理论,使用MATLAB-SIMULINK软件对简单的电力系统进行了模拟研究。采用平衡的3,50赫兹,415V(rms)梯形电压电源,具有21.8%的THD电压。 一个3,30千瓦的整流器馈电一个10电阻作为非线性负载。 没有补偿的该电路源的功率事实是0.95,而当前的THD是30.66%,远高于IEEE-519标准规定的极限。 使用软件的电源系统块设置参考功能对梯形电源和负载进行建模。 该方案的MATLAB-SIMULINK实现方框图如图5所示。所考虑的电源系统的非正弦电源电压和电流的波形如图6所示。
图6补偿前实例系统的电源电压和负载电联波形
通过使用所提出的算法,使用M-file参考中的MATLAB程序计算满足IEEE-519的功率需求和电流THD限制的参考补偿电流。由此获得的参考补偿电流与逆变器的实际输出进行比较,以产生选通脉冲。使用磁滞电流控制技术点火逆变器。用作补偿器的逆变器在每相中通过电感器连接到电力系统。
在补偿5%电流THD情况后获得的所需源电流和源电流的波形如图7所示。可以看出,补偿的源电流密切跟踪计算所需的源电流。参考补偿电流的波形如图8所示。
图7THD的所需和补偿源电流
图8 参考补偿电流
图9显示了补偿前后的源电流的谐波频谱。图9(a)表示在源电流中存在一个,五个,七个,11个,13个和17个谐波次序,而图9(b)则强调了在补偿后这些谐波是如何被控制(减少的)的。 当前的5%THD。表I显示了补偿前后和功率因数的比较。 可以看出,源电流的从30.66%提高到5%,而功率因数从0.95提高到0.99。
图9源电流的谐波频谱
图10.考虑的示例系统的功率因数与THD图
图11.示例系统的计算所需源电流波形
功率因数随谐波失真的变化如图10所示。结果确认设置为零,当电流的THD与电压的T
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20243],资料为PDF文档或Word文档,PDF文档可免费转换为Word

