
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
WiFi室内定位系统的时空采样和移动设备校准系统
摘要
基于IEEE 802.11b(WiFi)移动设备的室内定位系统通常依靠接收信号强度指示器来估计用户位置。这些系统的两个关键特征尚未被完全分析,即充分描述室内场景中电磁场分布所需的时间和空间采样过程;以及支持同一系统内不同移动设备所需的设备校准。通过使用以前提出的非参数方法进行系统比较,我们首先根据传统采样理论和系统性能分析了WiFi室内定位系统的时空采样要求。我们还提出并基准测试了三种用于器件校准的新算法,并提高了复杂性和表现性。我们得出结论:可以使用可行的时间和空间采样率,并且校准算法可以处理系统中先前未知的移动设备。
关键字 信号接收强度;室内位置;指纹识别;IEEE 802.11b;设备校准;采样。
第1章 导论
用于开放空间网络的移动终端的定位系统,例如全球定位系统(GPS),在室内环境中使用时存在限制。这主要是由于这些场景中电磁场的复杂传播。为此建议使用室内定位系统,它们由固定无线电信标和移动接收机组成。以前部署的网络,例如IEEE 802.11b(也称为无线保真或WiFi)网络可以精确地提供这种基础架构,然后可以用它来支持定位系统。该技术的共同基础是指纹识别技术,即在指定的空间域内接收信号强度(RSS)的映射。这些空间模式的复杂性确保了每个空间点都有唯一的签名。然而,电磁场传播的性质通常会产生非常不稳定甚至随机的时间RSS测量值。测量的统计性质使得从给定测量集合中找出位置的逆问题复杂化。这就要使用统计学习算法来解决这个问题。
1.1 参考模型
关于指纹技术的文献中可以找到许多参考。面对如此广泛的问题,每篇论文都必须对整个问题的次要特征进行分析。传统的参考文献一般可以分为以下几组:按照反馈给位置算法的RSS信号的特征子集的性能,采集设备的技术。学习算法的性质,最后是性能表征。在文献中,提出了基于使用成对自举重采样的截断假设检验的非参数模型评估和指纹算法比较的框架,并且提供了一组详细的优点数字,其同时考虑了距离的散射的二维性质。采用这种方法,可以很容易地对位置系统设计做出决定。然而,在该实验装置中,对于几种先前提出的学习算法,即神经网络,支持向量机和k-最近邻(k-nn)的性能方面没有显着差异。因此在设计的系统中可以使用计算最简单的(k-nn)算法。
尽管如此,基于指纹识别的室内定位系统的几个相关方面还没有完全解决。具体来说,指纹识别中的关键问题是RSS的测量质量,这显然取决于电磁场分布和采集设备。虽然以前的一些作品已经部分分析了这些问题,但尚未提供对采集过程的时间和空间要求的综合描述。此外也注意到,系统性能对所使用的移动设备的类型非常敏感。由于它们在硬件和软件方面的差异,每种设备类型将为同一位置提供不同的RSS分布,因此使得当不同的设备存在于同一位置系统时难以实现高性能。据我们所知,没有设备校准算法已经明确确立。因此,在本文中,我们详细分析了基于WiFi的定位系统的采集过程,针对其设计提出了实用的指导方针,并针对该过程提出了适当的成本-效益解决方案。本文的目的是解决双重目标。首先,我们建议使用非参数模型比较方法(15)来确定离线训练阶段中RSS测量的适当时间采样周期、样本平均窗口长度和空间分辨率。我们对抽样理论的简单考虑以及非参数性能比较具有不同时间和空间采样率的系统。其次,我们详细分析了系统中支持不同类型移动设备的问题,并且随后我们提出了三种新的算法来处理它们,其性能成本不断上升。
1.2 设计方案
本文的方案如下:第2节给出了采集条件的背景,包括时空RSS分布和移动设备校准。 在第3节中,总结了以前提出的用于模型比较的非参数方法,并阐述了其在时间和空间采样分析中的应用。 此外,还提出了用于设备校准的新算法。 第4节和第5节分别包括用时空采样和校准算法进行的实验。 最后,第6节提供了总结。
第二章 输入空间属性
在本节中,我们总结了与本工作中涉及的两个问题相关的最新技术。为此,我们回顾了从不同来源获得的信息,如IEEE 802.11标准和科学文献。此外,当文献中的信息不完整时,我们会在实验装置的数据中包含一些简单的具有示范性的例子(在第4节中定义),它们支持问题陈述。我们首先描述指纹系统中一般采集子系统的方案。然后,对接收信号强度指标(RSSI)的定义和相关标准进行了总结。接下来讨论了有关放射电效应和时间空间采样的相关研究。我们还回顾了文献中关于来自不同WiFi设备的无线适配器以及无线设备控制器的影响的信息。这些问题在我们的实验装置中通过一个例子进一步说明。最后,回顾了文献中可用的器件校准算法。
2.1 一般采集子系统
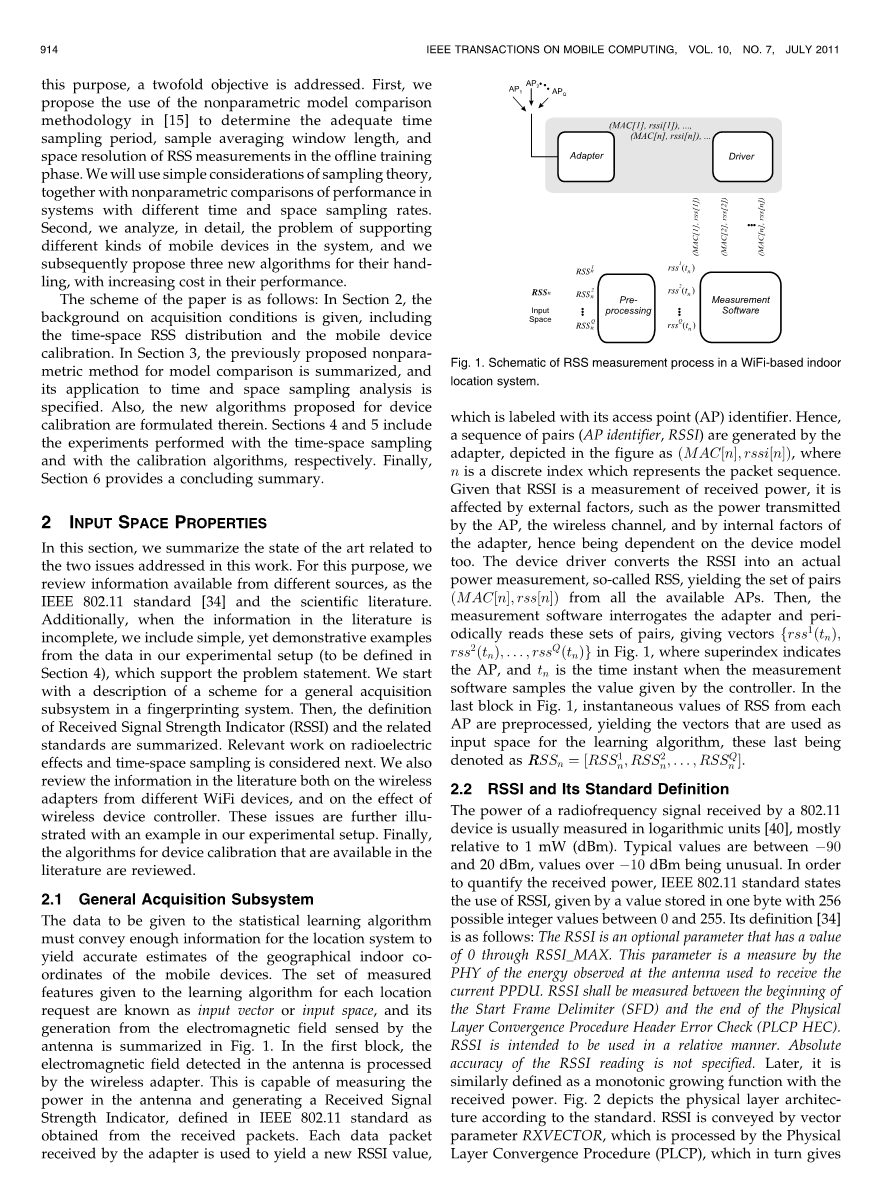
要提供给统计学习算法的数据必须传递足够的信息给定位系统,以便定位系统能够准确估计移动设备的地理室内坐标。对每个位置请求的学习算法所给出的测量特性集称为输入向量或输入空间,其产生于天线所感知的电磁场中,如图1所示。在第一个块中,天线中检测到的电磁场由无线适配器处理。这可以测量天线的功率,并产生一个接收到的信号强度指示器,在IEEE 802.11标准中定义为从收到的数据包中获得的。适配器接收到的每个数据包都用于生成一个新的RSSI值,使用它的访问点(AP)标识符。因此适配器产生一对序列(AP标识符,RSSI),图中描述的是MAC n; RSSI n,其中n是表示包序列的离散索引。由于RSSI是一种接收功率的测量,它受到外部因素的影响,例如AP传输的功率、无线信道和适配器内部因素,因此也依赖于设备模型。设备驱动程序将RSSI转换成实际的功率测量值,即所谓的RSS, 从所有可用的接入点产生一组对。然后,测量软件查询适配器和定期读取这些组对,给向量如图1中的frss1eth;tnTHORN;;rss2eth;tnTHORN;; 其中superindex表示AP,而tn是测量软件对控制器给出的值进行采样的时刻。在图1的最后一个块中,对来自每个AP的RSS的瞬时值进行预处理,产生用作学习算法输入空间的向量,这些向量被表示为RRSSn 1 / 2RSS1 n; RSS2 n; ...; RSSQN 2。
图 1基于WiFi的室内定位系统中的RSS测量过程示意图。
2.2 RSSI及其标准定义
802.11设备接收的射频信号的功率通常以对数单位[40]来衡量,主要是相对于1 mW(dBm)。典型值在90到20 dBm之间,超过10 dBm的值是不寻常的。为了量化接收到的功率,IEEE 802.11标准规定使用RSSI,它有一个字节存储,其中256个可能的整数值在0和255之间。其定义如下所示:RSSI是可选参数,其值为0,通过RSSI_MAX。这个参数是通过在接收当前PPDU的天线上观察到的能量来测量的。在开始帧分隔符(SFD)和物理层收敛程序头错误检查(PLCP HEC)的结束之间测量RSSI。 RSSI的目的是相对地使用。RSSI读数的绝对精度没有指定。后来,它也被类似地定义为一个单调递增的函数。图2根据标准描述了物理层架构。RSSI是由矢量参数RXVECTOR传递的,它由物理层收敛过程(PLCP)处理,该过程反过来又给出了链路层的指示值。另外,RSSI是在PLCP框架的前言中测量的,在开始帧分隔符和PLCP头错误检查之间。所有制造商都在802.11设备中实现这个可选参数;然而,它是由标准作为相对指标来定义的,并且它对不同的制造商具有相对和不同的精度。
图2 标准802.11中描述的RSSI的测量过程及PLCP框架。
2.3 无线电效应
在描述RSSI与无线适配器及其控制器的依赖关系之前,先检查影响指标测量的设备外部其他因素。
一方面,接收功率取决于发射机。在对WiFi中功率控制算法的可行性的研究中,分析了来自不同制造商的APs中使用逐步修改的发射功率所得到的功率。 实验结果表明,许多接入点无法精确修改其发射功率,即使AP设定了恒定的功率值,该接入点也随着时间而波动,因此需要求平均过程以获得稳定的RSS测量值。
另一方面,在文献中已经具体分析了修改无线信道的因素,我们将自己限定在最相关的结果中。从实验中得出结论,接收功率不只是距离的函数,因为室内的无线电传播遵循复杂的随机空间信号模式。在实验中,分析了移动元件(汽车、人、门)对接收信号功率的影响,并对其进行了明显的修正。最后,在试验中,我们发现在802.11系统中接收到的功率随使用频率的变化而变化,因此,有11个可用的WiFi通道。
2.4 不同设备中的无线适配器
正如前面所描述的,RSSI的标准定义几乎没有提供关于如何测量它的信息,这导致不同的制造商使用不同的等级和分辨率来表示。通常使用少于256个可能的值。例如,Cisco使用101个值并将RSSI_MAX设置为100,而Symbol Technologies将RSSI_MAX设置为31(32个值),Atheros芯片组将其设置为60(61个值),因此参数RSSI_MAX对于不同的模型是不同的。此外,分辨率随制造商的不同而变化。例如,考虑到思科提供了101个值和Atheros 61,两个适配器的一个单元的变化并没有考虑到接收功率的相同变化。此外,对应于零RSSI的最小功率值由接收器灵敏度决定,这很大程度上取决于其电子和信号处理的质量,因此也取决于制造商。总的来说,根据文献所述,两个不同移动设备的位置之间的关系可能不会相同。具体而言,根据文献中来自不同制造商的具有相同规格的两个无线设备在荒岛上测量接收功率作为函数,显示差异高达20 dB。
2.5 无线设备控制器的影响
设备控制器将由适配器硬件给出的无尺寸RSSI转换成具有物理意义的比例尺。接收功率以RSSI_MAX的百分比或以dBm为单位的功率值显示。然而,该值通常依赖于控制器。举例来说,许多平均每个变量都有一个单独的值[1],用于平均的样本数量取决于控制器,而控制器反过来也可以依赖于操作系统。
2.6 设备校准算法
室内定位系统中的设备校准是用于管理与学习算法的训练阶段期间使用的移动设备不同的过程。它可以被看作是从新设备生成的输入空间到原始数据集的输入空间的转换。 在文献中给出了一种可能的方法,假设存在一个简单的传播模型,并且任何卡接收到的RSS必须适应该模型。 在这个问题的表述中,任何与理想传播模型的测量偏差都归结于卡的行为,并且可以基于这个理想模型设计一个校准过程。结果得到了一个大房间,假设传播模型是有效的,方法的改进约为2到3 m。尽管如此,这是一个使用简单传播模型的参数化过程,在许多室内场景中通常不太准确。
第三章 用于空间数据分析的方法
在本节中,我们介绍了用于分析WiFi室内定位指纹系统的方法。首先,对设计中引入的系统比较的非参数化过程进行了总结。然后,利用奈奎斯特采样定理的简单考虑和不同采样率的系统的非参数比较,描述了时间和空间采样周期的分析。最后,提出了三种新的移动设备标定算法,其复杂性和成本日益增加。
3.1 非参数模型比较
指纹系统中非参数精度评估和比较的理论基础可以是在参考文献中找到,下面概述它们。简而言之,一组四个性能指标和一对非参数测试产生了两个定位系统之间的详细比较。
3.2 时空采样分析
如前一节所述,室内定位系统中的RSS随时间而变化。这些变化应该被考虑进去,因为它们的平滑度将决定在没有信息丢失或过多冗余的情况下使用的时间采样周期。此外,RSS的可变性还需要在不同的条件下对样本进行统计,以便在后续的预处理阶段进行分析。采样周期和采样间隔对系统性能有一定的影响。此外,在离线的stageisatii -消费任务中采样采集,并且在在线位置阶段,系统需要在每个给定的时间间隔内进行位置估计,这将高度依赖于两个时间参数。
3.3 设备标定的新算法
现在,我们提出了三种新的校准算法,目的是克服在2.5节中总结的设备校准算法的局限性。正如所观察到的那样,方法的概念复杂性是完全不同的,所以它们的预期性能也是不同的。
第四章 实验时空采样
在这一节中,我们将给出确定适当的时间采样率和采样间隔的结果,以获得一组足够的测量代表,足够代表给定位置的RSS的电磁行为。我们在不同的采集移动设备上使用Nyquist准则的简单考虑,然后比较选择的参数对全球系统性能的影响。在确定适当的空间采样间隔时也遵循类似的程序。
4.1 实验设置
下面介绍的所有实验都是在一个43mtimes;13m的地区进行的,有八个办公室,在y方向走廊和两个大厅(见图3)。 RSS测量采用每平方米一个位置大致均匀的空间密度在254个位置进行。 在每个位置,对于与图中所示的四个AP中的每一个相对应的RSS,登记了具有100ms的采样周期的500次瞬时测量。 所有的测量都是在面向北方的设备上进行的。 在这个实验中,使用了三种设备:INTEL,ZYDAS和EDIMAX。
图3 实验区域与四个AP的位置
4.2 空间抽样
空间采样间隔和奈奎斯特准则。为了确定训练数据离线获取所需的足够空间采样间隔,我们分析了指纹系统覆盖区域中RSS空间分布的二维谱。由于空间样本并没有精确的采样长度,而是在存在一些波动和墙壁缺失值,我们提前插入了RSS。常规的二维空间采样网格的数据,采用传统的平滑样条,具有0.5 m的空间分离(非均匀网格,平均间隔为1 m)。
第五章 器件校
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[468843],资料为PDF文档或Word文档,PDF文档可免费转换为Word

