
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
电子显微镜内部基于TDC的纳米级位移测量方法*
摘要
微观位移的最重要基础之一是微观位移和纳米位移的精确测量。 本文重点介绍了纳米操纵机器人的末端执行器测量,该机器人在扫描电子显微镜的真空室中工作。 一个标准电容器通过应变计进行充电和放电,并通过时间数字转换器测量时间,该时间数字转换器可用于计算位移。 对功耗进行了分析,并与传统的惠斯通电桥进行了比较。 在误差得到优化的同时,功耗大大降低,因此在真空环境下具有优势,难以散热。 测试了漂移,分辨率和线性度,并给出了闭环控制演示和重复的微单元探测演示以验证该方法的有效性。
引言
如今,利用压电纳米操纵器在扫描电子显微镜(SEM)内的操纵发展迅速,许多商业机构报告了许多原型[1-5]。在学术机构中,多伦多大学的Y. Sun报告了一种可以通过负载锁进行交换的系统,该系统用于从FFT装置中移除纳米线。来自奥尔登堡大学的S. Fatikow开发了几种由压电陶瓷驱动的微操纵系统,并利用视觉伺服操纵微物体并将AFM移入SEM室。名古屋大学开发了具有四个机械手单元的系统,总共具有16个自由度。他们使用AFM悬臂将其定位在多层中,以实现拾取,固定,弯曲,扭曲等[2] [6] [7]。这些系统已得到证明,包括微纳米材料的处理[8],纳米材料表征[9]和
* *由加拿大自然科学与工程研究理事会(NSERC),安大略省研究与创新部,加拿大日立高科技公司和中国国家自然科学基金(61473295、71401189、61273352、4164103)支持,以及北京自然科学基金(4152054,4164103)。
C. Zhou,Wang。Wang,Z. Wu Z. Cao,S. Wang和M. Tan在中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190(e邮箱:zhengxing.wu@ia.ac.cn)
邓L.中央财经大学统计与数学学院,北京100080
国内的研究集中在光学显微镜下的操作上,例如HIT开发的MEMS组装系统和BUAA开发的宏观/微观自动组装系统。 SEM内部的操纵系统现在并不丰富。粘滑结构驱动的遥控操纵系统。北京大学[11] [12]和北京工业大学[13]使用Kleindiek的MM3A机械手开发微/纳米操纵系统。
在微操作中,定位方法是最重要的技术之一。随着高精度加工的发展,最近开发了新的测量方法[14]。扫描电镜有特定的限制,包括狭窄的空间,散热困难和电子束辐射。相关研究还不够。扫描电镜内部使用的主要方法包括视觉伺服,光学编码器,电容/电感传感器和电阻应变仪。
利用SEM图像反馈,可以定位和操纵纳米尺度的目标,因为e SEM是一个易于理解的实时视觉平台。但是,图像质量受到亮度波动,漂移和噪声的限制,这意味着该方法不够好。光学编码器会引入额外的热量,并导致温度变化。由于需要在长距离上仔细路由感测信号,因此电容和电感式传感器既昂贵又复杂,无法集成到纳米处理系统中。
基于应变仪的传感是测量变形的可靠方法。但是,惠斯通电桥的传统传感电路会产生大量热量,并且在SEM内部漂移过大。本文提出了一种基于时间数字覆盖器(TDC)的测量方法来测量SEM内部纳米操纵器的纳米级位移。基本思想是为标准电容充电和放电并测量时间,该时间可用于计算电阻值。位移与增量值成比例。该方法具有精度高,功耗低的优点。
在本文中,第二部分简要介绍了我们的纳米机械手系统。第三节介绍了基于时间数字覆盖器的测量方法。第四节描述了方法的规范。第五节给出了该系统的演示,最后,第六节总结了本文。
二 纳米操纵器
在模板工作中,开发了在SEM内部工作的纳米级操纵器,该操纵器由四个单元组成。 每个单位是线性定位器,可以扩大运动范围。 精细定位器是由PZT堆栈执行器驱动的三个挠性铰链的组合,这也是笛卡尔坐标机器人。
系统的电路系统分为两部分:传感器和控制器。 由于机械手安装在真空室内,因此所有可能散发热量的部件都安装在真空室外,例如高压运算放大器。 所有的传感器系统都安装在室内,收集数据,简单地过滤并通过I2C总线发送出去。
由粗定位器和细定位器组成。粗定位器是具有三个滑点的笛卡尔坐标机器人
电阻应变仪可用于将其连接到变化的零件时进行变形测量。在我们的系统中,我们将应变仪直接粘贴到PZT堆栈的表面。当应变仪被电池组伸出时,电阻值的变化与位移成正比。测量电阻变化的经典方法是惠斯通电桥,这种桥在通常情况下被广泛使用。但是,该方法不适用于真空条件,因为电阻一直在通电,并且后续的运算放大器也具有很高的功耗。散热状况将在几分钟之内变得很糟。本文基于TDC的方法是对标准电容充电和放电以测量时间,从而可以计算出电阻值。极低的功耗可确保低漂移。
A. TDC方法
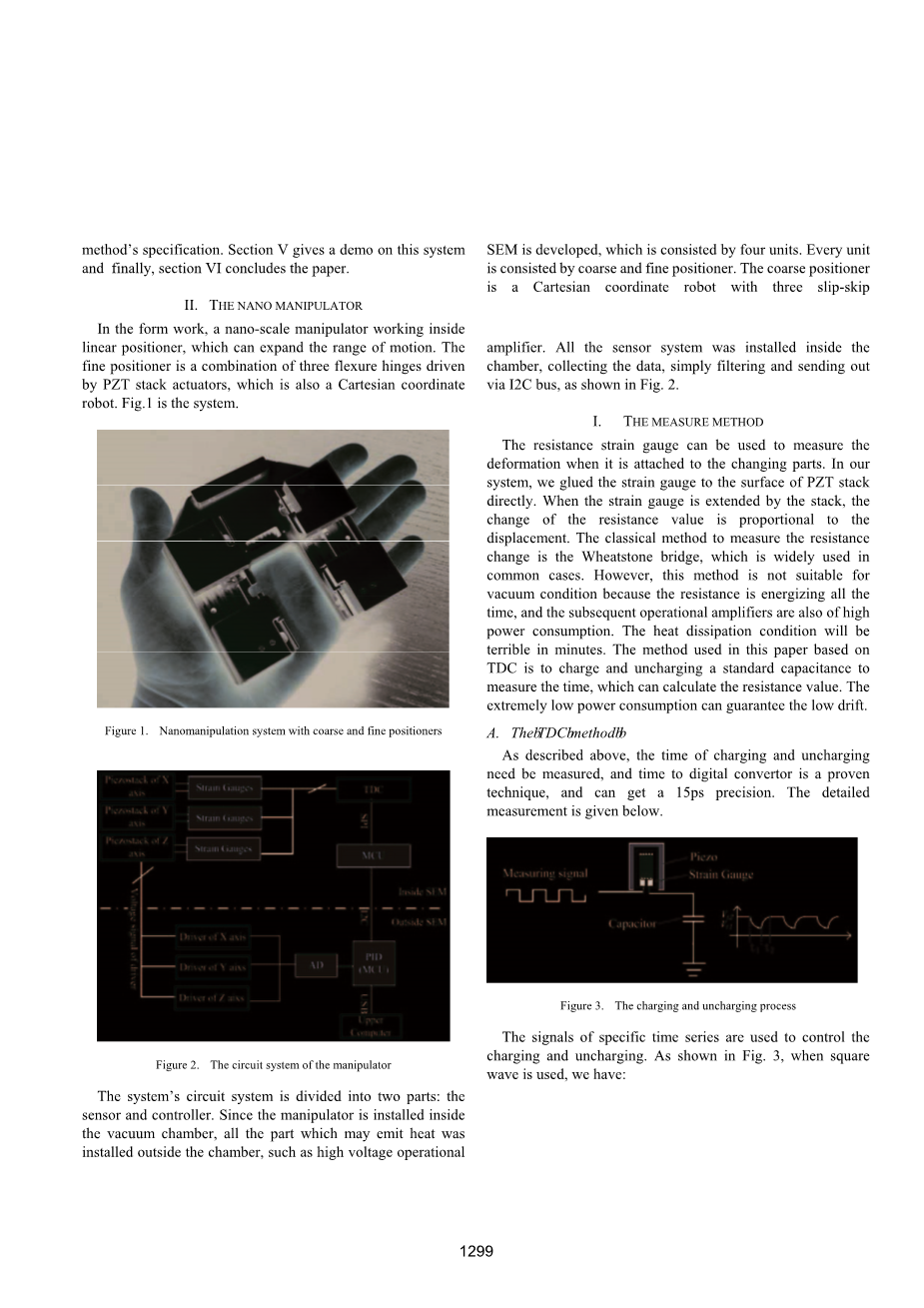
如上所述,需要测量充电和充电的时间,到数字转换器的时间是一种成熟的技术,并且可以获得15ps的精度。详细测量如下。
特定时间序列的信号用于控制充电和放电。 如图3所示,使用方波时,我们有:
其中vs是充电电压,v1和v2是
充电和放电的阈值。 t1和t2分别是它们的时间。
电阻值可以通过t1或t2来计算。 由于需要变形/位移,因此我们可以将其与未变形的应变仪进行比较。 以充电时间为例,我们有:
ts1是未变形电阻的充电时间。
R是电阻值的变化。变形用His表示的位移,可以通过SEM的图像或激光测距方法进行校准。
实际上,为了提高精度,可以在与标准充电时间相同的条件下测量标准电阻。标准电阻可以选择不变形的应变仪,并固定在相同温度的地方。这将减少温度变化的影响。
B.这种方法的耗散功率
整个传感器系统工作在SEM的真空室内,真空度高至10-3〜10-4 Pa,系统可以在很小的基础上传导热量。这种方法的耗散功率很重要。当系统长时间工作时,低耗散功率非常有助于减少漂移。对于TDC方法,计算电阻应变仪上的功率并将其与惠斯通电桥进行比较。
应变计的功率可分为两部分:充电和放电:
其中W1和W2是充电和放电的功率。 vc和ic是电容的电压和电流。然后,可以将耗散功率计算为:
以v1 = 1.5V,v2 = 3V和vs = 3.3V为例,我们可以得到
PTDC | 0.0036W。对于惠斯通电桥,采用相同的参数,我们可以得到耗散功率Pbridge v Rs2 / /,因此
Pdridge | 0.031瓦考虑到后续运算放大器的功耗也很高,因此TDC方法的优势更为明显。
C.其他讨论
对于TDC方法,也存在误差,包括电源误差,量化误差等。由于TDC的高精度,该方法的量化误差很低,高达15ps。因此量化误差为15ps / 100us = 1.5 * 10-3%。在惠斯通电桥中,量化误差为分辨率的一半。当使用12bi〜14bit AD时,误差为0.5 / 212〜214 = 0.012〜3.1 * 10-3%。此TDC方法基本等于15位AD。
惠斯通电桥的测量频率可能很高,因为它受到AD芯片带宽的限制。但是,TDC方法的频率受充电和充电时间的限制,因此我们得到f 1 /(t1 | t)2 2.9kHz,这远低于正常值
AD芯片的频率,但是对于纳米级的操纵器来说已经足够了。
二。传感器特性
我们使用SEM真空室内的机械手测试我们的传感器系统。 SEM在80万倍的放大倍率下工作。去噪和图像稳定方法[36]用于在高SEM放大倍数下补偿图像噪声和漂移。位置传感器的特征是使用亚像素视觉跟踪来测量的[20]。表一总结了整个系统的性能。特征包括传感器的漂移,线性,分辨率和准确性。
表一:
系统规格和性能
尺寸完整系统100times;100times;20 mm3
一台机械手30times;30times;17 mm3
位置传感器分辨率lt;1 nm
漂移lt;1 nm /分钟
粗定位器(开环)范围XY上10 mm,Z上5 mm
最小步长112.5 nm
精密定位器(开环)范围〜22ȝm
最小步长0.12 nm
精密定位器(闭环)范围20ȝm
精度5 nm
最高速度45ȝm/ s
A.传感器的漂移特性
传感器读数的漂移主要是由应变仪的温度变化引起的。将整个系统安装在SEM内后,将SEM腔室抽真空并等待数小时,以使系统和环境达到热平衡。长时间的等待可以排除系统初始热变形对测量结果的影响。然后,系统已打开电源,而PZT仍未驱动。我们记录了
读数为10000秒,如图5所示。传感器在前60秒迅速漂移,如图5(b)所示。如图5(c)所示,漂移在1分钟后降至3 nm /分钟,并在最后60秒降至0.83 nm /分钟。
B.传感器的线性
传感器线性度是系统的测量输出与实际结果之间的关系。 SEM的图像识别可以作为真实结果。在此测试中,使用了80,000的放大倍率,并且系统在轴的整个行程范围内每10秒采取2ȝm的运动步幅。如图5所示,使用SEM图像直观地跟踪了实际定位。r2值为0.9998证实了位置传感器的出色线性度。
三,传感器应用程序的演示
传感器最重要的应用是将位置信息反馈给控制器以计算控制值。我们通过读取TDC的输出来设计一个简单的PID控制器,以计算控制电压来驱动PZT堆栈,以演示传感器的应用。如图6所示,我们使用一个10 nm步进的输入信号,可以比较传感器的输出,图像识别和设定值。
一种简单的PID方法可以很好地控制位置,位置精度为5nm,因此该方法适用于纳米级机械手。
IV。 结论
论文提出了一种基于TDC的纳米操纵机器人末端执行器测量方法,该机器人正在扫描电子显微镜的真空室中工作。 标准电容器通过应变计进行充电和放电,并通过时间数字转换器测量时间,该时间数字转换器可用于计算位移。 该方法在真空环境中具有优势,因为它的耗散功率非常低。
关于PS09芯片数据手册的译文:
简介:
PSOslash;9是一种用于超低功耗和高分辨率应用的片上系统。它是专为重量秤设计的,但也适用于任何基于金属应变计的力、压力或扭矩测量。充分利用了皮氏硬度的数字化测量原理。本第1卷数据表描述了PSOslash;9在前端模式下作为纯电阻数字转换器工作时的情况。均方根噪声:31 nV快速稳定,5 Hz 19 nV SINC3,5 Hz 11 nV SINC5,5 Hz在纯PSOslash;9模式下工作时,在称重应用(2 mV/V应变)中高达80000个峰值划分。在4.5 V的PSOslash;81模式下工作时,称重应用中的峰值划分高达120000次(2 mV/V应变)。分辨率:28位ENOB(RMS)或25.8位无噪声(峰-峰)可扩展更新率从lt;1 Hz到10 kHz。电流消耗:0.39 mA PSOslash;9本身(在最大速度下)0.007 mA PSOslash;9自身(在低电流配置下)0.002毫安的备用电流;电源电压:2.1伏至3.6伏;转换器类型:时间数字转换器(TDC);带8千字节一次性可编程(OTP)ROM的24位内部微处理器;4线串行SPI接口;2线串行I?C接口;UART(RS232);128字节用户EEPROM 160x24位用户RAM驱动外部LCD驱动电路的接口8个GPIOs引脚,最多24个输入可能4个电容输入集成用于惠斯通电桥直接驱动的模拟开关嵌入式温度测量和温度补偿精度lt;0.01°C(峰对峰)非常低的增益和偏移漂移嵌入式带隙电压基准看门狗定时器。
PSOslash;9是一种用于超低功耗和高分辨率应用的片上系统。它是专为重量秤设计的,但也适用于任何基于金属应变计的力或扭矩测量。充分利用了皮氏硬度的数字化测量原理。通过连接一个外部液晶驱动器和一些非常少的外部组件,你可以建立一个完整的电子称重。总体而言,一个非常紧凑的设计是可行的与PSOslash;9。因此,它非常适合于构建数字称重传感器(DLC),一个甚至不需要LCD驱动器的单元,其结果只是以数字形式提供给外部世界(通过SPI、IIC或UART)。强大而独特的皮ostrain温度补偿功能使传感器无需机械微调即可进行温度调节,大大简化了生产。同样,当涉及到数据链路控制系统时,这个特性非常有用,但是普通的模拟称重传感器也可以使用这个特性,从而提高质量。另一个有助于建造最新厨房或便携式秤的突出特点是基于电容的输入。使用电容键可以实现非常平坦的规模设计,并反映消费品领域的最新趋势,而这一点在目前约1微安的广告中得到了体现,这与外部驱动的传统解决方案相比要少得多。
该部件采用2.1V至3.6V的电源供电,电流消耗非常低。根据配置,电流消耗范围大约在0.005ma和0.4ma之间。更新速率可在lt;1hz到10khz的范围内扩展。最高100万个内部划分(28位ENOB均方根)的分辨率处于当今转换器的最高范围。这种高分辨率只能与高端sum;-Delta;-A/D转换器相媲美,但总电流消耗要低得多,而且集成了微处理器。配备了这些功能,各种电子秤可与PSOslash;9一起使用。在分辨率方面,它允许建立高达120000个稳定的峰值划分比例(在PSOslash;81模式下为2mv/V)!另一方面,复杂的电源管理和PICOSTRAIN测量原理的特殊特性可以将系统的总电流降低到15微安,包括传感器电流。用这种方法,用皮卡斯特伦可以建立纯太阳能驱动的基于金属应变计的称重仪。当然,这些好处可以结合在一起,例如,建立一个高分辨率但低电流的电子秤,如C3 legal for trade电子秤,使用2节AA电池可运行20000多个工作小时。
测量原理:
应变本身是通过放电时间测量来测量的。放电时间由应变片电阻和电容器负载决定。测量了正应变片和负应变片。两
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238520],资料为PDF文档或Word文档,PDF文档可免费转换为Word

