英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
第五届模糊系统与知识发现国际会议
模糊控制在AS / RS堆垛机中的应用
何芳
济南大学电气工程与自动化学院
陈月婷
济南大学电气工程与自动化学院 mmchenyueting@126.com
赵守华
济南大学电气工程与自动化学院 zxz_9999@163.com
摘要
堆垛机是在自动化仓储和检索系统(AS / RS)中进行货物运输的主要运输设备。 速度控制是堆高机控制系统的关键技术之一。 本文在对传统控制方法进行研究的基础上,设计了双模型模糊控制器,并将其应用于堆高机起重机的速度控制中,将Fuzzy-PID控制与传统的PI控制相结合。 根据实际运行情况,建立系统仿真模型。 通过MATLAB的Simulink仿真,结果表明双模型模糊逻辑控制器可以消除稳态误差和过冲现象。 其动态性能比传统的PI控制更好。 可满足巷道堆垛机的控制需求,提高工作效率。 另外,介绍了Fuzzy-PID控制器在堆高机PLC控制系统中的实现。
介绍
自动化存储和检索系统(AS / RS)是物流控制系统中的重要组成部分,它集机构,计算机,通讯网络,传感器和自动化技术于一体。 走道堆高机是主要的运输设备,其工作性能直接影响到AS / RS的整体工作效率。 一般情况下,通道堆垛机通过PLC通过监控器进行控制,实现高速运动。 定向精度和速度控制速度对堆垛机非常重要。 堆垛机的速度控制技术是AS / RS中的关键之一。
目前,堆垛机控制方案包括以下几种方法:(1)根据实际需求设计多个速度等级,如[1]; (2)采用闭环策略控制堆垛机速度,并采用开环策略
控制堆垛机的位置,例如[2];
(3)采用闭环策略控制堆垛机的速度和位置,例如[3]; (4)模糊控制策略,例如[4] [5]。 由于堆垛机高速行驶,第一种方法无法保证安全性能,因为它适合堆垛机的低速运行。 换能器用于(2)或(3)的方法中。 但是,当速度急剧变化时,货物很容易被这些方法分解。 在(4)的方法中,传统的模糊控制不能避免稳态误差。
堆垛机在起止点具有不确定性和离散性。 为了提高堆垛机的控制性能,本文在现有的堆垛机控制技术的基础上,提出了一种模糊PI双模控制策略。 这种控制器结合了PI控制和模糊控制的优点。
AS / RS和堆垛机的控制
自动化存储和检索系统(AS / RS)是一种仓库。 堆垛机的基本功能是将运载货物沿着高层固定货架的过道移动,并准确地完成存储和取回操作。 在这个控制过程中,关键控制技术主要有三部分。 首先是定位精度。 第二是速度的控制性能。 第三是货物携带时的保障措施。
堆垛机在三维方向上运行:沿货架的水平运动,垂直运动和叉的弯曲运动。 水平运动与垂直运动稍有不同。 在垂直方向上,仓库的每个位置都有两个操作位置。 下部位置用于堆垛起重机在取回物品开始时伸出叉子或方便地将叉子收缩到存放物品的末端。 位置较高
978-0-7695-3305-6/08 $25.00 copy; 2008 IEEE DOI 10.1109/FSKD.2008.177
508
用于在货物的末端存放货物或收缩货叉时取出货叉。 仓式起重机位置自动化控制的任务是实现仓库行,列,层方向的精确定位。
堆垛机的调速要求是沿每个方向的操作要快速,稳定。 有时候,定位精度应该很高。 特别是在水平方向上,堆高机应具有高速度和高定位精度。 所以这个方向的控制需求是最高的。 当堆高机当前位置与目的地之间的距离较远时,应该高速移动以满足快速跟踪的要求。 当堆垛机靠近目的地时,应该以低速移动以确保定位精度。 总之,性能良好的堆高机控制系统应满足调速控制的要求:高速运行,低速停车,确保定位精度,变速平稳变换。
堆垛机的双模式模糊控制策略
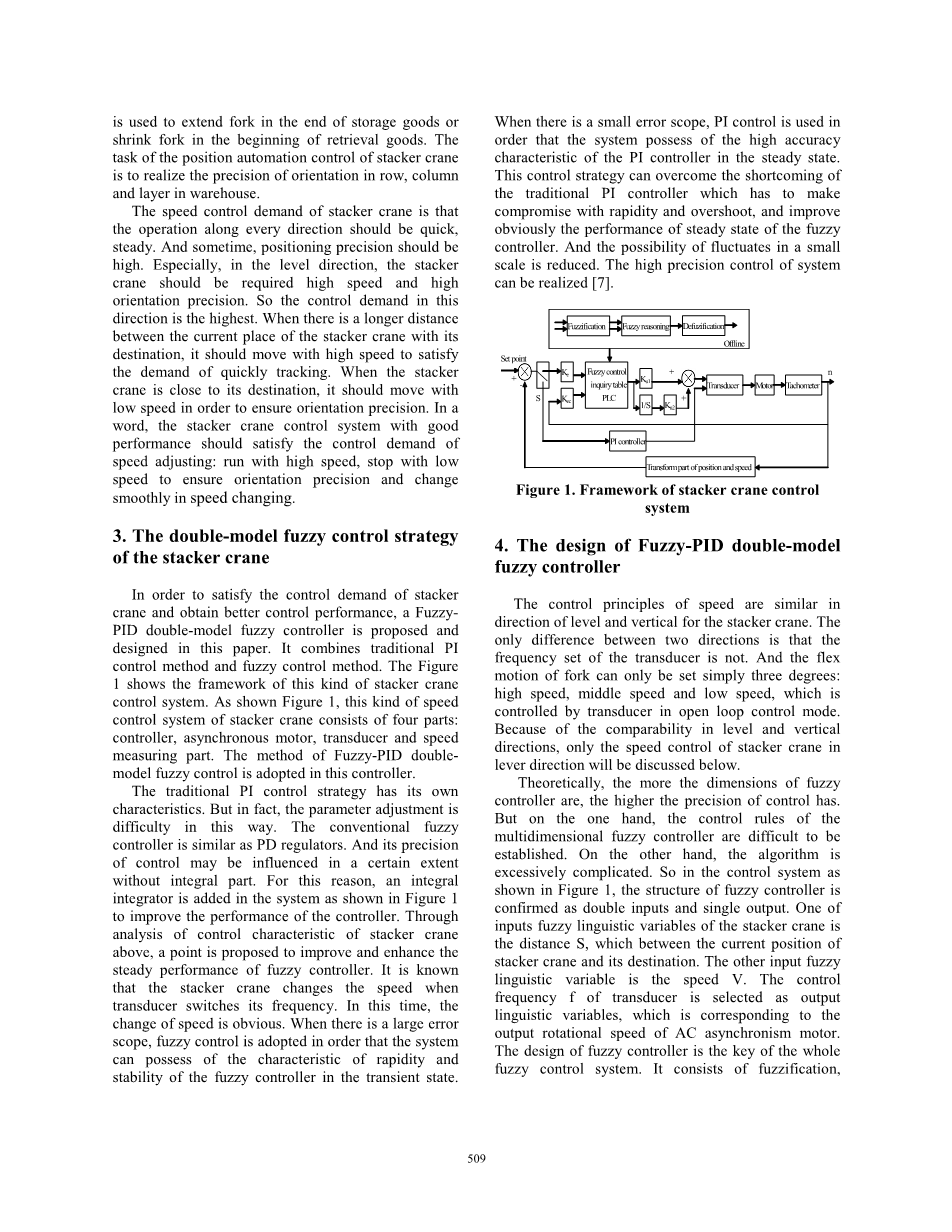
为了满足堆垛机的控制要求,获得较好的控制性能,本文提出并设计了FuzzyPID双模型模糊控制器。 它结合了传统的PI控制方法和模糊控制方法。 图1显示了这种堆垛机控制系统的框架。 如图1所示,这种堆垛机的速度控制系统由四部分组成:控制器,异步电动机,传感器和速度测量部分。 该控制器采用Fuzzy-PID双模式模糊控制方法。
传统的PI控制策略有其自身的特点。 但实际上,这种参数调整很困难。 传统的模糊控制器与PD调节器相似。 其控制精度可能会在一定程度上受到影响,而没有组成部分。 出于这个原因,如图1所示,在系统中增加了一个积分积分器,以提高控制器的性能。 通过分析上述堆垛机的控制特性,提出了一个改进和提高模糊控制器稳定性能的方法。 众所周知,当换能器切换频率时,堆垛机会改变速度。 在这个时候,速度的变化是显而易见的。 当误差范围较大时,采用模糊控制,以使系统具备瞬态过程中模糊控制器的快速性和稳定性。
当误差范围较小时,使用PI控制,以使系统具有稳定状态下PI控制器的高精度特性。 该控制策略克服了传统PI控制器不能兼顾快速性和超调性的缺点,明显改善了模糊控制器的稳态性能。 并且小规模波动的可能性降低。 系统的高精度控制可以实现[7]。
模糊化 模糊理论的虚化
离线
设定点
Ke
-
模糊控制查询表
PLC
n
K
u1
传感器 电机转速表
S KEC
1/S
K
u2
PI控制器
变速器的位置和速度
图1.堆垛机控制系统的框架
- Fuzzy-PID双模型模糊控制器的设计
速度的控制原理在堆高机的水平和垂直方向上是相似的。 两个方向之间的唯一区别是传感器的频率设置不是。 并且叉的弯曲运动只能设置为简单三度:高速,中速和低速,由开环控制模式下的换能器控制。 由于水平和垂直方向的可比性,下面将讨论堆垛机在杠杆方向上的速度控制。
理论上,模糊控制器的尺寸越大,控制精度越高。 但一方面,多维模糊控制器的控制规则难以建立。 另一方面,该算法过于复杂。 所以在如图1所示的控制系统中,模糊控制器的结构被确定为双输入和单输出。 堆垛机的投入模糊语言变量之一是堆垛机当前位置与目的地之间的距离S. 另一输入模糊语言变量是速度V.换能器的控制频率f被选择为输出语言变量,其对应于AC异步电动机的输出转速。 模糊控制器的设计是整个模糊控制系统的关键。 它由模糊化,
建立一套模糊控制规则,推理和模糊化。
-
- 模糊化
堆垛机当前位置与目的地S之间的距离,堆垛机V的速度以及换能器的控制频率f都是在实数字段中定义的变量。 S的准确范围设为(0,3)米,模糊控制器的语言数值为15,即[0,14]。 模糊语言变量的语言价值可以分为8类:S1,S2,...,S8。 量化因子Ke= 14/3 = 4.67。 由于堆垛机速度与电机转速成正比,因此采用电机转速代替堆垛机速度。 V的基本宇宙是电机的转速范围和设定
值是(0,1450)大鼠/分钟。 量化因子
如果S * = A且V * = B,则f * = C
其中A,B和C分别对应于语言变量S,V和f的模糊子集。 表1是模糊控制规则表。
表1.模糊控制规则表
|
fnof; * |
S* |
||||||||
|
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
S7 |
S8 |
||
|
V* |
V1 |
fnof;1 |
fnof;2 |
fnof;2 |
fnof;2 |
fnof;3 |
fnof;3 |
fnof;3 |
fnof;3 |
|
V2 |
fnof;1 |
fnof;2 |
fnof;3 |
fnof;3 |
fnof;3 |
fnof;3 |
fnof;4 |
fnof;4 |
|
|
V3 |
fnof;1 |
fnof;2 |
fnof;3 |
fnof;4 |
fnof;4 |
fnof;4 |
fnof;5 |
fnof;5 |
|
|
V4 |
fnof;1 |
fnof;2 |
fnof;3 |
fnof;4 |
fnof;4 |
fnof;5 |
fnof;5 |
fnof;5 |
|
|
V5 |
fnof;1 |
fnof;2 |
fnof;3 |
fnof;4 |
fnof;5 |
fnof;5 |
fnof;5 |
fnof;5 |
|
4.3。 模糊控制查询表的去模糊化和建立
根据Mandani模糊的方法
KEC=一千四百五十○分之七= 0.00483。 输出语言变量是变频器控制频率的fnof;,它与电机在水平方向上的转速相对应。 比例因子Ku = 1450/7 = 207。 V和f的模糊集合宇宙是相同的,它们都设置了8个类[0,7]。 1,V2,...,V5和fnof;1,fnof;2,...,fnof;8的模糊控制器的语言数值。
基于语言变量的价值和价值
推理,模糊关系矩阵为R = S*times;V*times;f*。 通过使用已知的S*和V*,可以获得f*。 *=(S*times;V*)○R。
由COG(重心)方法来做
去模糊化,输出控制变量f的语言 - 数值正在计算。 输出变量的模糊集是fnof;1,fnof;2...fnof;n.,mu;(i)是话语的宇宙。 计算重心的经典公式是:
n
投入产出的语言数值,建立评价表。 该
(i) f
f <em
全文共6406字,剩余内容已隐藏,支付完成后下载完整资料</em
资料编号:[14151],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

