英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于比例积分的三轴陀螺稳定摄像机支架的加速度计误差估计和补偿
多重积分观察者
李书生,钟麦莹*和赵艳
北京航空航天大学仪器科学与光电工程学院,北京100190
2014年5月27日收到; 2014年9月28日接受; 2014年11月19日在线发布
摘要
本文讨论了三轴陀螺稳定摄像机支架的加速度计误差估计和补偿问题。 在动态环境中,飞机运动加速度会影响加速度计输出,并导致姿态稳定精度下降。 为了提高控制精度,本文提出了一种比例多积分观测器控制策略来估计和补偿加速度计误差。 本文的基本思想是通过使用q阶多项式函数逼近误差性质,并将误差及其导数扩展为增广状态。 然后开发一个比例多重积分观测器来估计误差,并用这个误差表达误差与不平衡转矩之间的关系。 估计值与角度阈值进行比较,其结果用于补偿加速度计输出。 通过静态和车载实验表明,与传统方法相比,该方法可以有效提高姿态稳定精度。
关键词:三轴陀螺稳定,加速度计误差估计和补偿,比例多积分观测器,不平衡转矩
1 介绍
机载地球观测系统广泛应用于侦察,测绘和资源勘探等领域[1]。 在地球观测过程中,成像负载要求飞机保持均匀和稳定的理想运动。 但由于环境湍流和结构振动的影响,飞机呈现出扰动,这直接影响到影像的质量[2]。 通常,低频角运动会导致视线抖动并降低重叠程度,而高频振动会导致图像散焦。 因此,补偿飞机扰动移动是十分重要的,以提高航空摄影质量和调查飞行效率[3]。 将成像负载(如航空相机,激光雷达和光谱仪)与干扰运动隔离的一种方法是使用三轴陀螺稳定摄像机支架(TGSCM)[4-6]将它们与飞机相连。 TGSCM由三个用于补偿飞机低频角运动的平衡环和弹簧吸收器组成,以隔离高频振动。
TGSCM可以实现两种工作模式:组合模式和均衡模式。 在组合模式下,TGSCM使用位置和定位系统(POS)作为姿态角度传感器来实现高精度姿态控制。 此外,POS可以为成像负载提供马赛克图像所必需的运动信息[7]。 当POS出现问题或发生故障时,系统仍然存在需要稳定以保护成像负载。 在这种情况下,TGSCM将启用水平模式并使用加速度计来测量姿态角而不是POS。 这种模式的控制精度较低,因为加速度计性能比POS更差,但对于系统稳定性要求而言,这是非常必要的[8]。
在平整模式下,加速度计依赖重力加速度的投影进行姿态测量。 在这种情况下,飞机预计保持平均速度。 但是飞机始终难以以恒定的速度飞行。 飞机的运动加速度会影响加速度计的角度输出精度,导致姿态稳定精度下降。 因此,估计和补偿加速度计误差是非常重要的,这是本文的主要兴趣所在。
为了解决这个问题,对TGSCM进行了一些研究(见参考文献[8-10])。 一种解决方案是尝试在飞机操纵时断开加速度计反馈,然后再连接它[8]。 但在实践中难以实现,容易造成大的态度偏差。 自适应卡尔曼滤波器被设计为通过将其视为白噪声来估计误差[9]。 然而,在动态环境下,飞机的运动加速度是非常未知的,所以用白噪声来描述误差特性是不准确的。 因此,这种方法是不适用的。 基于这个问题,开发了一种改进的互补滤波器来修改加速度计输出[10]。 这种方法在很大程度上取决于低通滤波器的截止频率,这在实践中很难确定。 而且,由于陀螺仪噪音和前驱噪声,外部干扰,控制精度变低。
在另一个研究方面,比例多重积分(PMI)观测器已用于估计未知输入[11-13]和故障信号[14-16]。 不失一般性,它提供了一个q阶多项式函数来逼近未知信号,并将其导数作为状态扩展为同时估计。 这种观测器收敛速度快,估计误差小。 通过对加速度计输出的分析,误差是由时间函数形式的飞机运动加速度引起的。 因此,通过使用多项式函数来描述误差属性是适当的。 因此,本文提出了一种基于PMI观测器的控制策略来估计和补偿加速度计误差,以提高姿态稳定精度。
本文组织如下。 第2节介绍了TGSCM系统建模和问题陈述。第3节给出了错误估计和补偿策略。 实验设置和结果在章节中给出
最后,第5节总结本文。
- 2系统建模和问题陈述
2.1 TGSCM系统建模
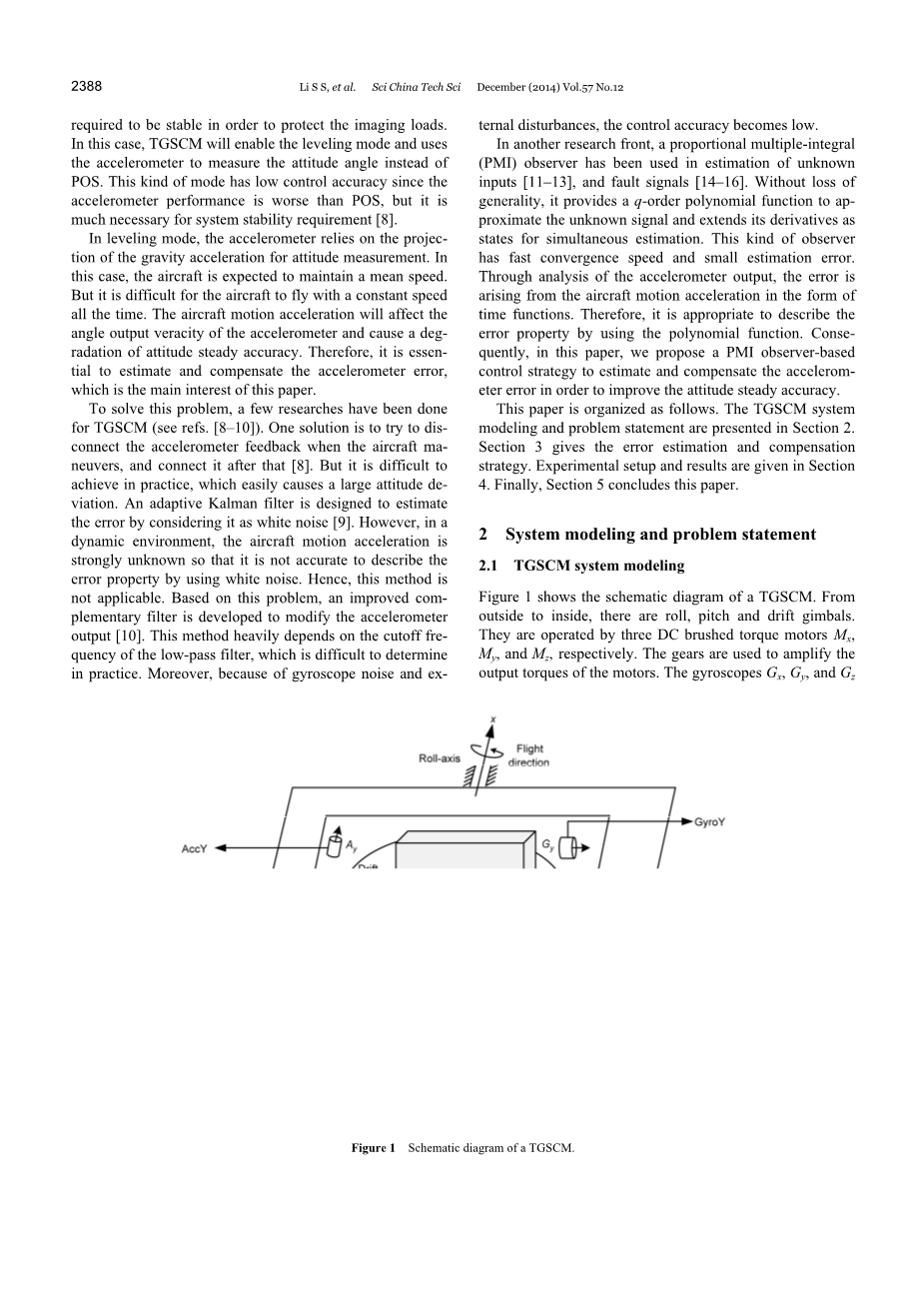
图1显示了TGSCM的示意图。从外到内,都有滚动,俯仰和飘移的万向节。 它们分别由三个直流有刷力矩电机Mx,My和Mz操作。齿轮用于放大电机的输出转矩。 陀螺仪Gx,Gy和Gz被用来测量角速度。加速度计Ax用于测量侧倾万向节的姿态角,而其敏感轴垂直于侧倾轴。 加速度计Ay用于测量俯仰万向节姿态角,其敏感轴垂直于俯仰轴。由于万向节的稳定范围和角运动很小,所以万向节耦合效应非常弱。
因此,TGSCM通常被认为是用于独立控制的三个单独的万向节(SGSCM)[17]。 SGSCM系统包含三个部分:直流有刷力矩电机,齿轮传输和万向节系统。
在平衡工作模式下,SGSCM采用三环控制策略[18]:电流环,稳定环和位置环,如图2所示。电流环用于减小反电动势的影响。 稳定回路用于补偿干扰转矩。 位置环能够根据加速度计角度反馈保证姿态的稳定精度。 Gq(s),Gw(s)和Gi(s)分别是三个循环控制器。 qin是姿态角参考输入。 在调平工作模式时,
qin= 0用于滚动和俯仰平衡。
图2 调平工作模式的三回路控制策略
如果QACC在位置回路内直接反馈,姿态稳定精度将受到严重影响。 在某些情况下,基本的系统稳定性无法得到保证。 因此,为了提高控制系统的性能,估计和补偿误差qe是非常重要的。
2.2 问题陈述
在参考文献[9],加速度计误差被认为是白噪声,其效果受卡尔曼滤波器的限制。然而,飞机运动加速度的特征是非常未知的,所以用白噪声来描述误差性质是不准确的。
加速度计错误qe是由飞机运动加速引起的,这通常是时间的函数。 因此,使用q阶多项式函数来描述误差性质是合理的(12)。 当q = 0时,
qe被认为是不变的错误; 当q = 1时,它可能是一个斜坡误差,当qge;2时,一个复杂的未知误差可以近似,这比其他更一般。
- 3 误差估计和补偿策略
3.1不平衡转矩分析
由于成像负载的不对称和安装偏差,几何中心和重心之间的不平衡距离不可避免地存在,导致额外的不平衡。那么qe的q阶导数,即qE(q)的是有界的,这样我们可以扩展误差qe及其导数qe#39;,我们以TGSCM的滚动轴为例。图3显示了不平衡转矩的示意图。 点o1是滚动轴几何中心,o2是负载重心。 o1和o2之间的距离是r。 r与水平面之间的角度随着ql具有零偏移a而改变。 滚动万向节内的系统质量为m,作用于重心o2。
图3 不平衡转矩示意图
3.2 PMI观察员设计
显然,上述观察者实际上是一个状态空间PMI观察者,它具有q个积分动作(参考文献[14]和[15])。 当q=1时,它变成比例积分(PI),观察者维度是n2=q 2。 因此,调整q是估计精度和计算效率之间的折中。 在本文中,我们认为q=2是一个温和的选择 。
在平衡工作模式下,SGSCM采用三环控制策略,电流环,稳定环和位置环,如图2所示。电流环用于减小反电动势的影响。 稳定回路用于补偿干扰转矩。 位置环能够根据加速度计角度反馈保证姿态的稳定精度。 Gq(s),Gw(s)和Gi(s)分别是三个循环控制器 。较大的m可以减小e的界限,但会增加观测器极点的幅度并导致更差的稳定性。加速度计Ax用于测量侧倾万向节的姿态角,而其敏感轴垂直于侧倾轴。 加速度计Ay用于测量俯仰万向节姿态角,其敏感轴垂直于俯仰轴。 由于万向节的稳定范围和角运动很小,所以万向节耦合效应非常弱。 作为刚体,万向等效惯性矩(包括成像负载)简化为Jl。
经过计算,当m从10上升到100时,电杆将相应增加10倍。 因此,选择m是状态估计误差之间的折衷,通常m= 10是一个合适的选择。在平层模式下,姿态稳定精度小于0.2°,当存在飞机运动加速度时,其值会大大降低。 那里pound;1l最大。因此,方程式中的角度阈值q通常被选中为0.2°,即q = 0.2°。 这一切都取决于实践中的经验。
4实验结果
为了证明建议的有效性,对比传统的实验方法提出的方法。
4.1实验装置
实验设置如图4所示。模拟有效载荷用于表示成像负载。精度POS是姿态角度评估的基准。
图4 实验装置
在本文中,我们以TGSCM的滚动平衡架为主题。为此,我们使万向节在恒定基础条件下以恒定速度旋转。 在这种情况下,电动机转矩Tl完全用于克服干扰转矩Td。在静态环境下,扰动扭矩Td主要包括质量不平衡扭矩Tdm和摩擦扭矩Tdt。 此外,摩擦转矩的大小在旋转过程中保持不变。说明摩擦力矩TDT可以消除,
通过添加两个方程和系数来表示,在拟合图表数据后,我们可以计算不平衡转矩系数的值,即,
Km= - 1.1078。
对于加速度计误差qe,选择q = 2,一个2阶使用多项式函数来近似其属性。4.2静态实验结果
为了证明所提出的PMI观测器的有效性,我们在加速度计输出中添加一些误差信号并采用这个观测器来估计它们。在图5中,为了模拟飞机的突然机动或横向加速度,我们增加了一个逐步误差信号(蓝线),而绿线是它的估计值。 开始时,qe= 0。 从10秒到35秒,qe被设置为不同的值。 人们可以看到估算性能令人满意。为了模拟飞机周期性运动特征,附加了一个正弦误差信号。 频率为0.1 Hz,幅度为0.5°。 很明显,估计几乎没有延迟和衰减。
接下来,我们将误差信号添加到闭环控制系统中以揭示姿态角湍流。 在这里我们使用POS作为角度评估基准。
图5 逐步误差极其估计
由于所提出的方法(PMIFB)的补偿作用,湍流大大降低,不超过0.1°。显然,所提出方法的角度湍流远小于传统方法。系统稳定精度提高了近80%。
4.3车载实验结果
最后,为了评估系统态度稳定,在一个动态环境中的准确性,车载实验在崎岖的道路上进行车辆强烈的振动或机动可以用来模拟飞机的运动加速度。 高精度POS(两部分:PCS和IMU)被视为姿态角评估基准。在这个实验中,角度参考输入qin= 0,我们采用了上述两种控制方法。 实验图如图13所示。蓝线是传统的加速度计反馈结果,而红线是基于PMI观察者的补偿结果。 显然,所提出的方法(PMIFB)的角度湍流比传统方法(AccFB)小得多。
然后,我们采用典型均方根(RMS)方程来计算稳态精度[21] 。稳态精度结果如表所示。采用传统方法,稳态精度约为0.1902°(RMS)。 经过该方法补偿后,稳态精度可达0.0415°(RMS),是一种比传统方法更大的改进。 因此,很明显,对于TGSCM系统,提出的基于PMI观测器的误差估计和补偿。
图6 车载实验图
策略可以成功应用于提高平整工作模式下的姿态稳定精度 。
5 结论
为了提高TGSCM的姿态稳定精度,本文提出了一种基于PMI观测器的加速度计误差估计和补偿控制策略。 通过对加速度计输出的分析,误差来源于飞机的运动加速度,可以认为是时间函数。 然后使用2阶多项式函数来近似误差性质,并基于此,开发4阶PMI观测器以实现在线误差估计。 估计值与角度阈值进行比较,其结果用于补偿加速度计输出。 静态实验表明,PMI观测器对于逐步或正弦误差具有令人满意的估计性能,闭环系统具有更好的姿态稳定性。 动态车载实验表明,与传统方法相比,该方法可以大大提高姿态稳定精度。
参考文献
1Guo HD,Xu JM,Ni GQ,et al。 一种新的空中地球观测系统及其应用。 IEEE Symposium on Ge oscience和遥感,澳大利亚悉尼,2001年。549-551
2崔海涛,程曦。考虑有界干扰和输入饱和的航天器反卷绕姿态机动控制。 中国科学技术科学,2012,55:2518-2529
3郭昊陈建军曲绮伶李, 基于改进相似假设的飞机运动仿真空间大气湍流场的生成。 中国科学技术科学,2011,54:244-250
4Zhou XY,Li JP,Liu W.机载陀螺稳定摄像机支架动力学研究与分析。 Sci Surv Map,2013,38:24-27
5戴忠民王建国赵,et Dai 基于积分成像的修改光学显微镜快速采集三维图像。 Sci China Tech Sci,2012,55:977-981
6徕卡测量系统GIS和测绘有限公司。 莱卡PAV80陀螺稳定摄像机安装用户手册,2009
7Cheng JC,Fang JC,Wu WR,et al。 基于运动解耦的机抖抖动POS机隔振系统优化设计方法。 测量,2014,48:314-324
8齐志贵。机载遥感三轴惯性稳定平台控制系统的设计与实现[J]。 硕士学位论文。 北京:北京航空航天大学,2009年
9Zhang YS,Du CC,Mu Q Q.机载遥感稳定平台加速度计的随机误差建模与补偿。 Trans Inst Measur Control,2013,35:503-509
10杜C C.三轴惯性稳定平台稳定精度分析与控制(中文)。 硕士学位论文。 北京:北京航空航天大学,2012.48-54
11Jiang GP,Wang SP,Song W Z. Design of observer with i
全文共6468字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11933],资料为PDF文档或Word文档,PDF文档可免费转换为Word

