英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
使用FSR传感器阵列和基于SVM分类器的压力分布图的手指动作识别
李楠,杨大鹏,李江,刘红,蔡和高
中国黑龙江省哈尔滨市哈尔滨工业大学机器人与系统国家重点实验室
摘要:为了控制具有大量自由活跃度的灵巧假手(DOF),有必要可靠的从人体中提取出控制手指动作的意志。在本次研究中,大量的各种手指的运动识别是基于由肌肉前臂的机械作用所产生的多样性的压力分布。手指运动的压力分布图是由32个力敏电阻(FSR)传感器阵列测量得到。而为了匹配不同的手指运动的压力分布图,设计出了一种基于支持向量机(SVM)算法的多级分类。多学科实验表明它有可能识别出多达17种不同的手指运动,包括单个手指的动作及多手指的抓取动作,在会话验证中有超过99%的准确度。此外,交叉验证会话表明,假如FSR阵列不进行复位将会被强制使用。结果表明,采用这种方法给具有多自由度灵巧手假肢的控制带来了极大的应用前景。
版权@2012,吉林大学。爱思维尔出版社出版,版权所有。
标识符:10.1016/S1672-6529(11)60095-4
1 引言
在过去五年,带有单独驱动手指的新型假肢得到了很好的发展,例如i-Limb仿生手,米开朗基罗手,HIT-IV手和智能手臂。所有这些手都和人体的手一样,有吸引人的外观和良好的灵活性。然而,人机界面(HMI)的控制能力在连接用户和假手之间的研究仍不够充分,这使得假肢手不能充分展示其能力。
肌电信号(即肌电图EMG)是用于连接通过建立正向控制信道的假手的最常用的信号。用户的控制意图可以通过读取由不同的肌肉活动所产生的肌电图显露出来。然而,肌电控制方法是不适合用于新颖假手的控制,因为EMG只能控制假手进行抓取释放练习动作。因此,为了能辨别更多的手指动作必须加强EMG的控制能力。到现在为止,仍然有一些明显的缺陷限制了肌电控制方法的应用,包括:(1)精确的电极放置的要求涉及大量的准备工作;(2)特征提取的复杂过程消耗大量的处理时间;(3)电磁辐射信号引起的干扰,汗水和机械应力常常导致低的识别准确率和短工期的应用。这样,需要找出更多的实际实施假手控制的一些新的替代方法。
压力分布图(PDM)采用了前臂表面上的压力分布作为手指动作识别方法。当手指移动时,肌肉形变产生的力将作用在固定在一个肢体插座和前臂周围的压力传感器阵列上。然后,通过分析传感器的压力分布图可以辨别手的动作。这种方法由Phillips 和 Craelius首先提出。在他们的研究中,做了些测试来区分拇指、中指和小拇指的屈曲运动。Kuttuva 通过虚拟手实现了三个操作(转动手腕,中指屈曲和把握)的识别。Honda、Yungher和Craelius提出了类似的方法来区分几个健康人的六种不同的抓取运动。 所有这些结果表明,PDM方法对于多灵巧度的假手控制具有潜在的应用。
本文的目的是通过PDM方法准确的识别不同种类的手指运动(包括每根手指的放松,弯曲/伸展动作和拇指食、指抓的开/合,三脚架的抓和抓的力度)。为了实现这一目标,采用了一种强大的支持向量机(SVM)的统计分类算法,用来分辨动作。SVM被广泛用于手动作的识别。在参考文献[9]中,SVM分类方法成功的识别出了六种手指动作,期准确率在90%以上。此外,在参考文献[10]中提到九种手指动作的识别准确度为93.1%plusmn;5.1。所有上述研究均表明SVM适合用于手指运动的识别。
在本文中,32个传感器阵列及多类SVM的主要算法将在第二节介绍。另外,还包括多学科实验设置的详细介绍。第三节内容为实验结果的呈现和分析。最后,讨论和最终结论将分别在第四节和第五节给出。
2 实验材料和方法
2.1 传感器阵列放置
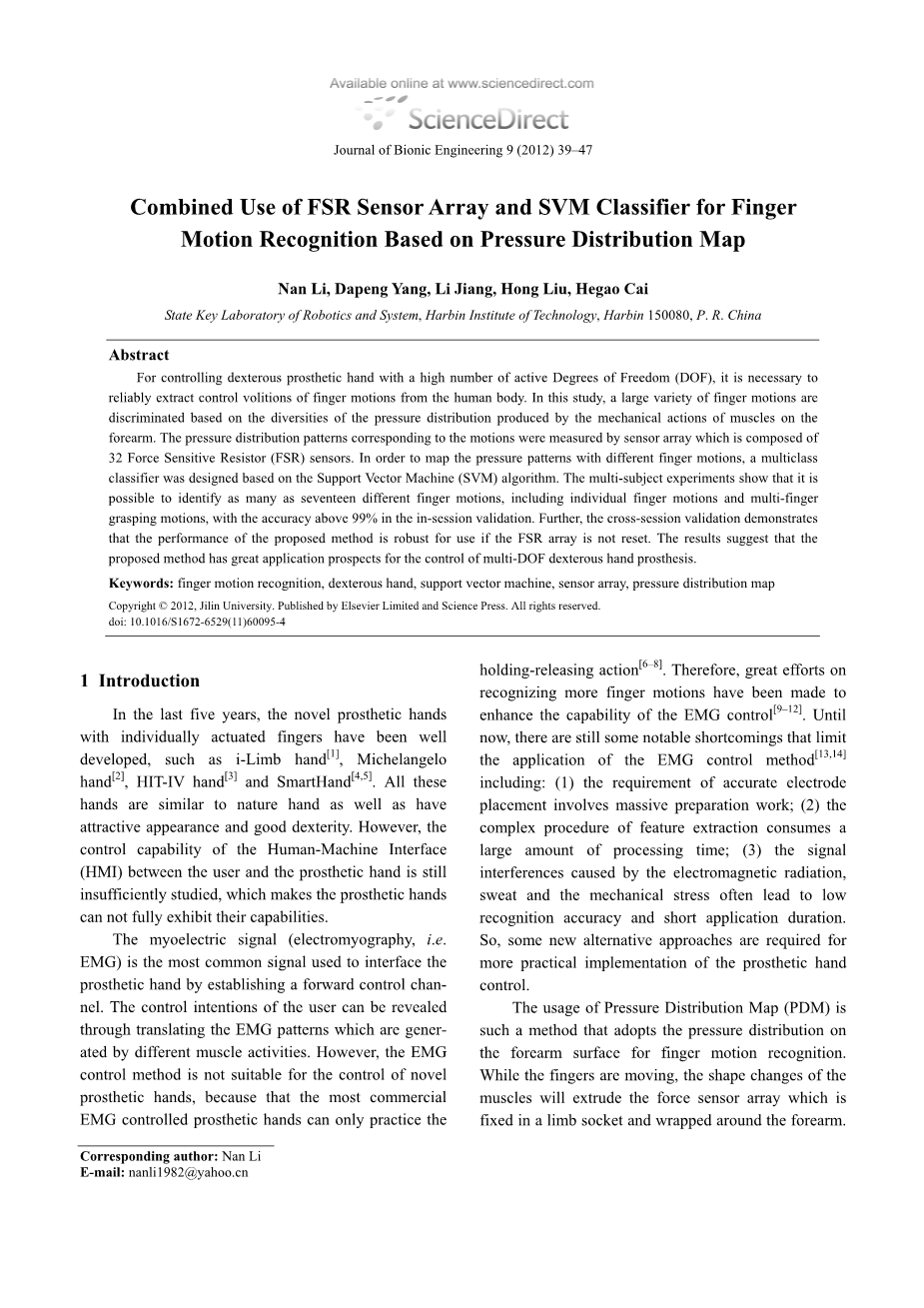
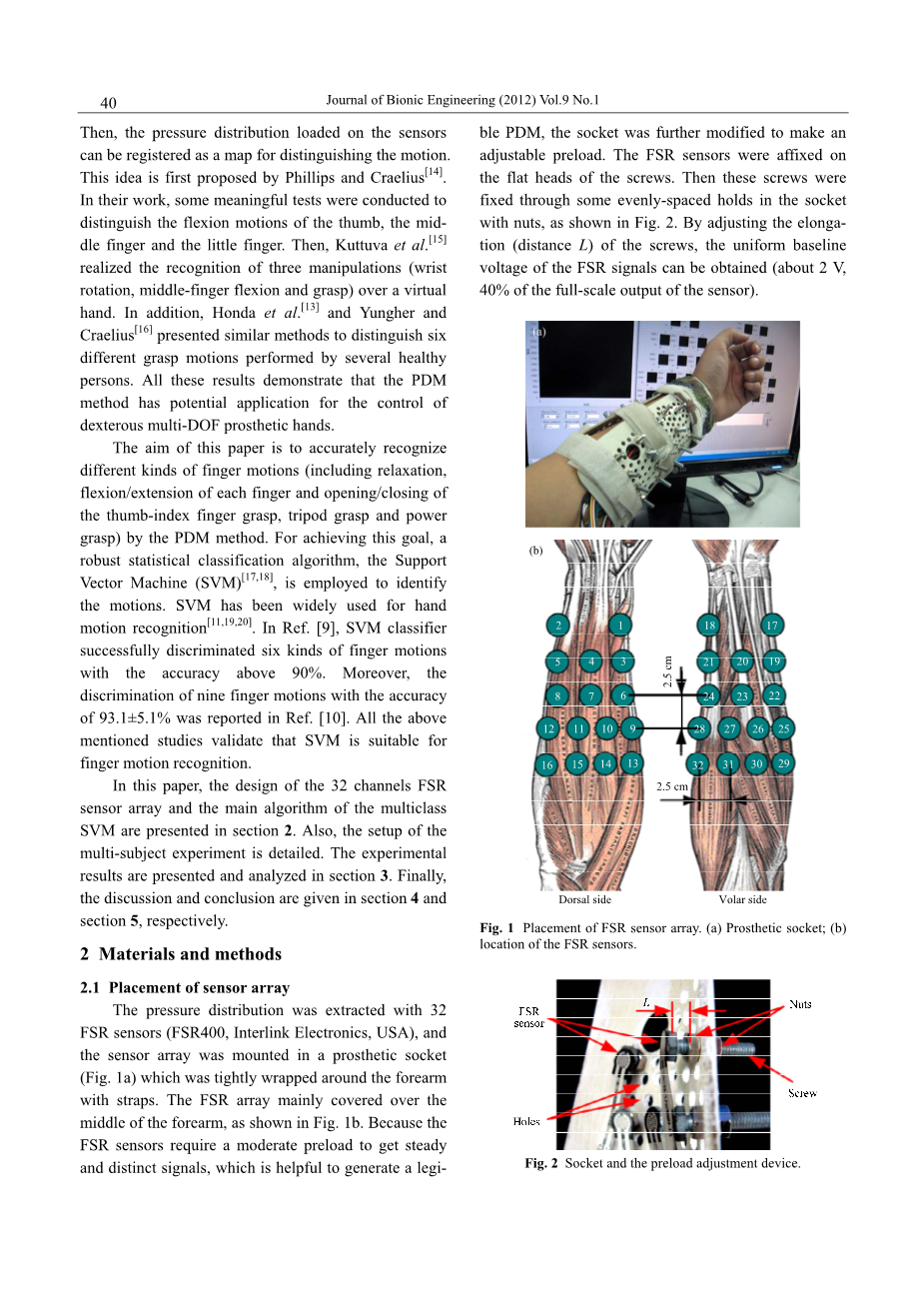
压力分布的提取采用32块FSR传感器(美国Interlink Electronics公司,FSR400),传感器阵列被安装在一个被肩带缠绕的假肢上(如图1a)。FSR阵列主要覆盖在前臂正中,如图1b所示。因为FSR传感器需要一个温和的力来获得稳定和独特的信号,这对于产生清晰的PDM是十分有帮助的,插口进一步改进用于调整预紧力。FSR传感器被贴在螺钉的平头。然后,这些螺钉是通过与螺母插口部分均匀间隔固定,如图2所示。通过调整螺钉的伸长率(距离L),可以得到与FSR信号的统一基准电压(约2V,传感器的满量程输出的40%)。
图1 传感器放置.(a)假手接口;(b) FSR传感器的位置
图2 插座和预紧力调整装置
2.2 数据采集装置
所有的FSR传感器都连接到一对自制成的16信道测量单元(图3)。每个测量单元是由分压器、RC低通滤波器和A/D转换器组成。在分压器模块中,FSR装置被放置分在测量电阻压器的装置上,所以FSR传感器的阻值变化就能转化为电压值的变化。为了隔离FSR的高源阻抗输出,在分压器的输出端接了一个电压跟随器。RC低通滤波器用来消除频率高于20 Hz的干扰信号。A/D芯片(AD7490,美国ADI公司)将12位分辨率的电压信号进行数字化处理,并通过串行外设接口(SPI)总线传输数据到发射单元(图3)。传送单元是基于数字信号处理器(DSP)(TMS320F2812,美国TI公司)的设计,其作用是采集从测量单位为100Hz的32通道的FSR数据并通过RS-232总线将数据发送到PC 。PC 通过LabVIEW程序接口接收数字数据,并存储在一个数据文件中。
图3 数据测量和处理系统的结构
2.3模式识别算法
为了从PDM中将手指动作解码出来,我们采用了一对单的方式构建多类SVM分类。于此,总共需要136个二进制SVM分类(K(K-1)/2,K是类的数量),最终的分类标签将由多数投票给出。每个二元分类器的模型首先用训练集训练。在的二元分类,例如标有“m”和“n”的两种不同的运动的分类,N个数据点的训练集为{(xk, yk) | k = 1, 2, hellip;, N},其中xkisin;R 32为输入PWM的特征矢量,ykisin;{I1, 1},N是其相关输出。训练后,决策函数可以写成:
其中x是测试矢量,akisin;R是拉格朗日乘数是在支持向量的非零点,bisin;R是两个类的的阈值分类,psi;(X,XK)是非线性的核函数,径向基函数(RBF)为:
假如将公式(1)中的X作为“m”分类,对于“m”类中的投票是由一个增加。除此以外,“n”以一为基数增加。得到所有二进制分类的投票结果,最终决定是类获得的最大投票。为了获得较高的分类精度,惩罚参数C和核函数系数gamma;两个参数,用5倍交叉验证方法和指数网格搜索法(C= 64,Ȗ= 0.5)进行了优化。
2.4实验装置
在这项工作中,在六名身强力壮的男性M1到M6(年龄24至28,右手占优)身上进行实验。所有受试者均给予书面通知同意参加。在这些人中,M1对FSR阵列有足够的控制经验,M2是手指灵巧的吉他学习者,其余的人是常见的新手。在实验过程中,M1,M2和M3被要求用左手来做手指动作,同时其余被要求使用他们的右手。
总共有十七个手指运动被选中,包括松弛(停止所有动作),每个单独手指的弯曲/伸展和拇指食指的张开/闭合的抓,三脚架把握和掌握力度。这些运动和它们的组合可以用来控制假手来实现日常生活中灵巧手指运动(例如手指抽头),手势(例如,“OK”,计数数目)和一些有用的多手指操纵(例如保持,夹紧)。
为了测量运动的压力分布,每个受试者的前臂包裹着FSR阵列放在桌上用手掌垂直于平面桌。保持这一姿势,用于执行所有的手部动作。在一个实验环节中,十七个动作是由测试者通过发射单元的一个可视的闪烁LED灯给出的提示一个个完成。每一个手指运动激活5秒,并释放5秒。同时,传输单元(图3)收集的32通道FSR数据的数据帧包含32通道FSR数据及其手运动的相关标签。然后,数据帧被发送到个人电脑的更新速率为100赫兹。为了检验所提出的方法的长期性能,进行了四次实验,形成一个测试组。每个环节之间有一个约3分钟的休息时间,在测试组中传感器阵列未被取下。一个测试组后,除去FSR阵列,对象休息一个半小时。为了评估传感器阵列复位的影响,共测量了四个测试组以实现跨会话验证。
3 实验结果与分析
本节介绍了用PDM功能来区分十七个手指运动的一些初步的测试,这在文献中还未见报道。我们在这一部分专注于这的2个问题:
- 是否有可能获得所有身强力壮者的17种手指运动的可辨别PDM功能?
- SVM分类能否可靠的识别所有提到的动作?
首先一个基本问题是关于用所提出的FSR阵列来提取相应特征的手指运动的可能性,第二个问题是所采用分类算法的能力,接下来是实验结果的显示与给验证。
3.1手指动作及相应的压力分布
我们在PC的MATLAB脚本上进行了测量数据的离线分析。在实验期间,获取了十七种手指运动压力信号。我们手动提取的压力信号激活部分的稳定数据,以建立每个运动的压力分布图像。图4b显示从FSR传感器获取信号时,食指是处于伸展状态。为了得到压力分布图像,采用了从信号稳定部分获取的数据帧。在一个采样周期中每个数据帧包含32个采样通道FSR的数据和相关的动作标签。对于每一个数据帧,32信道的FSR数据显示由5times;10点阵图像的上部3D杆和下部颜色网格构成(图4c)。格点数据的拓扑结构如图1b FSR传感器分布所示。三维条的高度直接表明压力值。同时,较低的颜色网格、三维条投影用不同的颜色来表示大概的压力分布。当颜色从绿色变成红色表明压力在增大。深蓝色的网格位置没有放置传感器。另外,数据帧中的运动标签表示这帧图像是属于某一种动作。
采用这种方法,PDM的所有测量的手的动作都用字母来标记,lsquo;rrsquo;表示所有手指的释放动作,lsquo;ftrsquo;, lsquo;firsquo;, lsquo;fmrsquo;, lsquo;frrsquo;,lsquo;flrsquo;, lsquo;f2rsquo;, lsquo;f3rsquo;, lsquo;f5rsquo;分别表示拇指、食指、中指、无名指、小指的释放动作及拇指食指抓、三手指抓、用力抓的动作。lsquo;etrsquo;, lsquo;eirsquo;, lsquo;emrsquo;, lsquo;errsquo;, lsquo;elrsquo;, lsquo;e2rsquo;, lsquo;e3rsquo;, lsquo;e5rsquo;分别表示以上列出手指及多指的抓握动作。通过手指运动和PDM之间的一对一的关系,可以显示出受试者的控制意图。所有受试者(M1到M6)根据前臂自身特点产生可辨识的PDMS 。受试者M1的 PDM如图5所示,在运动过程中的高、低压区域明确划定。在相同的试验组,实验会产生类似的PDMS。然而,压力图会因为不同测试组的FSR传感器阵列的设置不同而发生变化。
图4 PDM的测量过程
图5 受试者M1的十七种手指动作和相应的PDM
3.2手部动作识别
基于清晰的PDM,可以假设SVM分类器识别手指运动的精度高。为了验证这个假设,我们直接把32通道FSR数据作为PDM的特征来训练分类器。这个实验称作会话验证,分为以下几步完成:首先,在一个会话中的数据被分为四个部分;然后,每一个褶皱视为训练集,反过来,其余的3个褶皱用于验证。培训和分类的验证,用经典的SVM工具箱LIBSVM-2.89进行。预测的验证褶皱的输出标签被构造为一个混乱矩阵,其中指数(b,a)的元素“a”的百分比来动行预测运动标签“b”。因此,对角线元素揭示分类精度,其余部分表示误分类率。对于一个全面的估计,我们重复这个程序的每个主题的所有数据会话和计算平均混乱矩阵,如图6所示。
图6 六个受试者的平均混乱矩阵(M1到M6)。每个矩阵是16个实验数据会话的混淆矩阵的平均值。从这些矩阵,我们可以看到,手指动作是误分类重复。(a)M1;(b)M2;(c)M3;(d);M4;(e)M5;(f)M6
从图6中可以看出,大多数受试者的支持向量机分类器都取得了令人满意的分类结果(如表1所示)。受试者M1,M2 和M6的精确度高于99%,最低的精确度都达到了93% (M3的测试结果)。受试者M1、M2、M6每个手指运动的错误十分罕见。对比之下,至少有三种手指动作是误判为主体M3、 M4、M5的。随着进一步的调查,我们发现,大多数的错误发生在单个的无名指和小拇指的手指运动。这种现象可能是由于大多数受试者的无名指和小拇指不如其他三个手指灵活。幸运的是,受试者M1(长时间的科目训练)和M2(吉他学习者)测试精确度高,这证实,如果普通人做更多的练习也能达到同样的精度,手指的灵巧度和没有明显差异之间的左右手有利于提高分类精度。
表1 受试者M1到M6的十七种手指动作的平均分类精度(平均值plusmn;误差)
在会议期间确认经过更严格的测试,命名为跨会话验证,进行了检查所提出的识别系统的效率。在这个实验中,以一个受试者为例,十六次的测量数据会话(四个试验组,每组四次)分别编号为1A, 1B,...,1D, 2A,hellip;2D, 4D hellip; 4D,数字代表测试组指标和字母代表会话指标。例如,会话2A表示第二测试组中的第一个
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147607],资料为PDF文档或Word文档,PDF文档可免费转换为Word

