英语原文共 7 页
自动太阳能跟踪系统路灯的调查研究
摘要
自动太阳能跟踪系统路灯可以对方位角与高度可调节的机械装置进行控制,因此太阳能电池板能够随着阳光的变化进行调整,从而提高光电转换的效率。在这项工作中,我们展示了方位角和高度可调节的机械装置,也计算出了风的阻力。此方法是采用光电二极管阵列通过捕获阳光的入射方向来实现的。光电二极管所产生的信号经过LM339N处理之后发送到单晶片,而单晶片经过信号响应后,分别反映至方位角调整装置的发动机和高度调整装置的线性驱动器中。嵌入在可调节装置中的霍尔感应器被用于反馈装置移动信息至单晶片中。这些结果清晰地表现了此类应用系统的无限潜力。
关键词:自动跟踪,光线,光电二极管,单晶片,昼夜鉴定
引言
太阳能路灯被广泛使用,因为它们具有许多优点,如:高可靠性、长寿命、几乎不需要人工干预等。其次,太阳能路灯不需要布线,它可以很方便地进行安装,所以有助于减少对路面的损坏。另外由于所用能源清洁环保,因此可以达到节能减排的目的。
然而,太阳能路灯也存在许多不足之处。最明显的一点就是太阳能电池板的光电转换效率比较低,太阳能电池板的光电转换效率通常仅在10%至15%之间。 太阳能本身不是很稳定,它受天气影响非常大,并且有无法解决的间歇性问题[1],因此它易受光照条件的影响。而由于太阳能路灯的能源仅依赖于太阳能,故而低光电转换效率和太阳能的不稳定性限制了太阳能路灯的能量供应。因此,提高太阳能电池板的光电转换效率或使用大面积太阳能电池板是保证太阳能路灯能够正常工作的重要途径。
尽管扩大太阳能电池板的面积可以提高每日发电量,但是需要增加灯座的抗风性能,这是因为太阳能电池板通常被安装在路灯的顶部。在扩大太阳能电池板的面积之后,风力对太阳能电池板的影响将显著提高。此外,由于太阳能电池板的成本较高,因此使用大面积太阳能电池板需要增加太阳能电池板材料的成本,同时也会提高灯座的抗风性能的成本。
提高太阳能电池板的光电转换效率是提高其每日发电量的另一种方法。 Mohammad和Karim [2]提出,与单轴跟踪系统相比,双轴跟踪系统可以产生18%的额外太阳能,而混合跟踪系统则可以提供比双轴跟踪系统更多的能量。结果表明,太阳能跟踪系统在光伏系统中的运用是提高其效率的重要途径[3]。但是,在跟踪系统中使用更多的轴可能会增加成本[4]。Wentzel和Pouris [5]提出了太阳能跟踪装置,通过光学传感器和光电检测电路将光信号转换为MCU(微控制器单元)能处理的电信号。在处理转换而来的电信号以后,MCU会输出控制信号,此控制信号通过操纵电动机来完成跟踪。而Ibrahim等人[6]在形状记忆合金控制器的基础之上通过太阳光产生的温度变化实现了单轴被动太阳跟踪。Rao等人[7]开发了一种二维可编程太阳能跟踪器控制系统,他们通过对太阳运动路径理论的分析和研究来构建了太阳跟踪器的运动数学模型,并通过微机遥控成功捕获了太阳的踪迹。Zhao和Bi[8]设计了基于互补金属氧化物半导体图像传感器ADC-2121(Agilent Technologies Co.,Ltd,Santa Clara,CA)的全自动便携式太阳辐射计。该设计具有精度高、可自由调零等优点。Wang等人[9]提出了一种基于位置敏感探测器的太阳跟踪器。事实证明,太阳跟踪器可以达到理想的性能指标。
然而,Bakhshi和Sadeh [10]认为太阳跟踪器可能不那么经济,尽管它们在光伏系统中使用时可以捕获更多的太阳能。Eldin等人[11]认为在寒冷地区使用太阳能跟踪器比在炎热地区使用更有效,因为后者可以有更多的太阳能辐射度。
在克服了前人的不足之处以后,我们提出了一种自动跟踪太阳光入射方向的新方法来提高太阳能电池板的光电转换效率。这种方法可以让太阳能电池板随时处于垂直于太阳光的入射方向的状态,以此来吸收更多的太阳能,并且能够让太阳能电池板的光电转换效率提高20-25%。与此同时,我们通过我们的设计降低了太阳能跟踪器的价格,提高了性价比。
调节装置设计
调节装置的作用是通过接收来自MCU的控制信号来操纵太阳能电池板,从而使得电池板能够保持随时处于垂直于太阳光的入射方向的工作状态。Alexandru [12]提出了两种设计跟踪系统的方法,这两种跟踪系统分别由单轴和双轴组成。与单轴跟踪系统相比,双轴跟踪系统在跟踪太阳方面性能更优越。Seme等人[13]展示了双轴跟踪器的两种不同体现,分别为:倾斜跟踪器和方位角跟踪器。为了达到更精确的跟踪效果,我们选择双轴跟踪系统并使用方位角以及高度跟踪器作为跟踪系统的组成部分。因此,调节装置的设计分为方位角调节装置和高度调节装置两部分。方位角调整装置的作用是改变太阳能电池板在水平面上的角度,使太阳能电池板转向太阳光强度最大处的方向。而高度调节装置的作用则是改变太阳能电池板的所处的高度,使太阳能电池板处于太阳光强度最大处的高度。
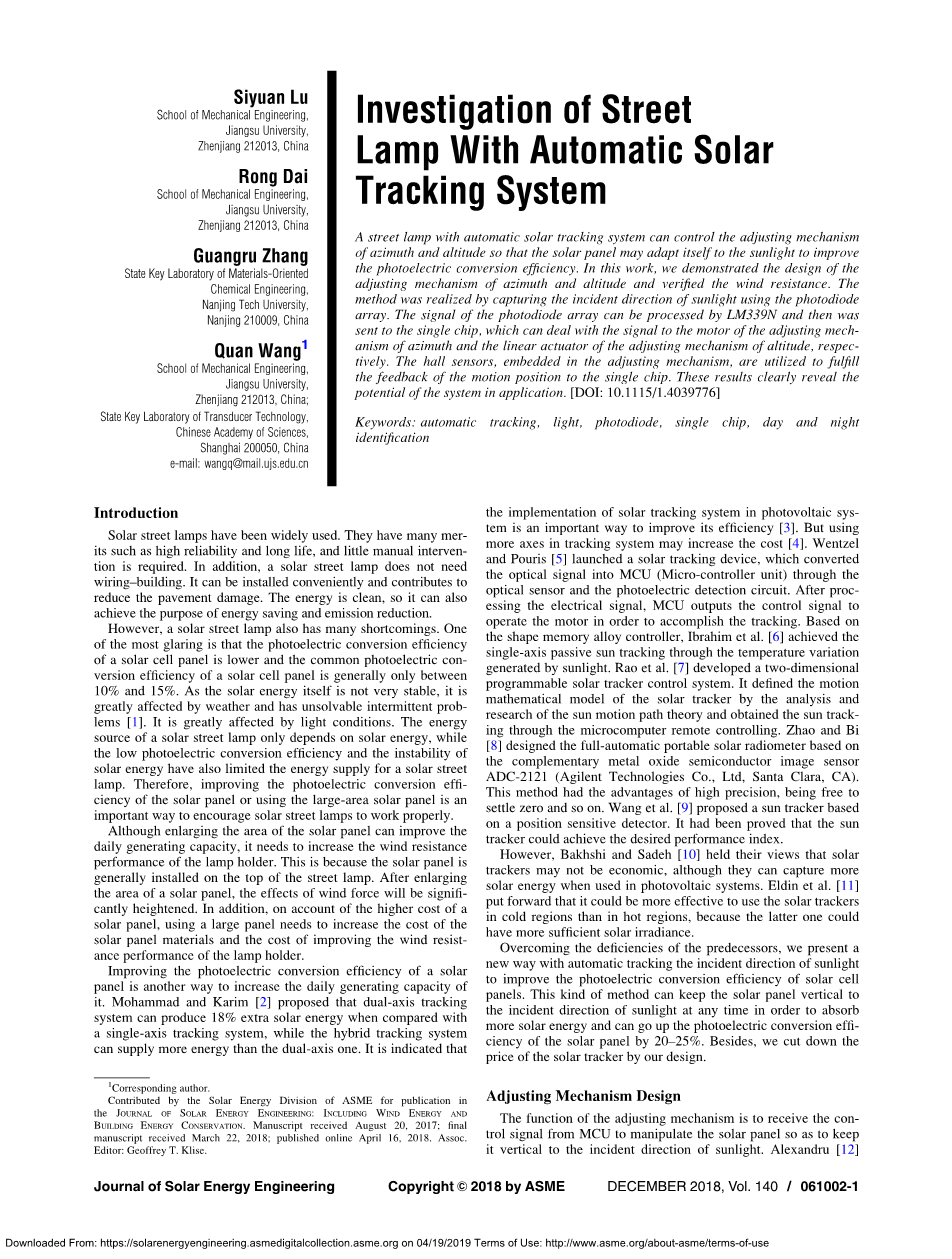
图1描绘了系统所用的方位角调节装置,它通过直流减速电动机来处理扭矩,并通过刚性联轴器将输出扭矩传递给扭转空心轴。方位角调节装置由一对圆锥滚动轴承固定,顶部有一个铰链支架,用于连接太阳能电池板。
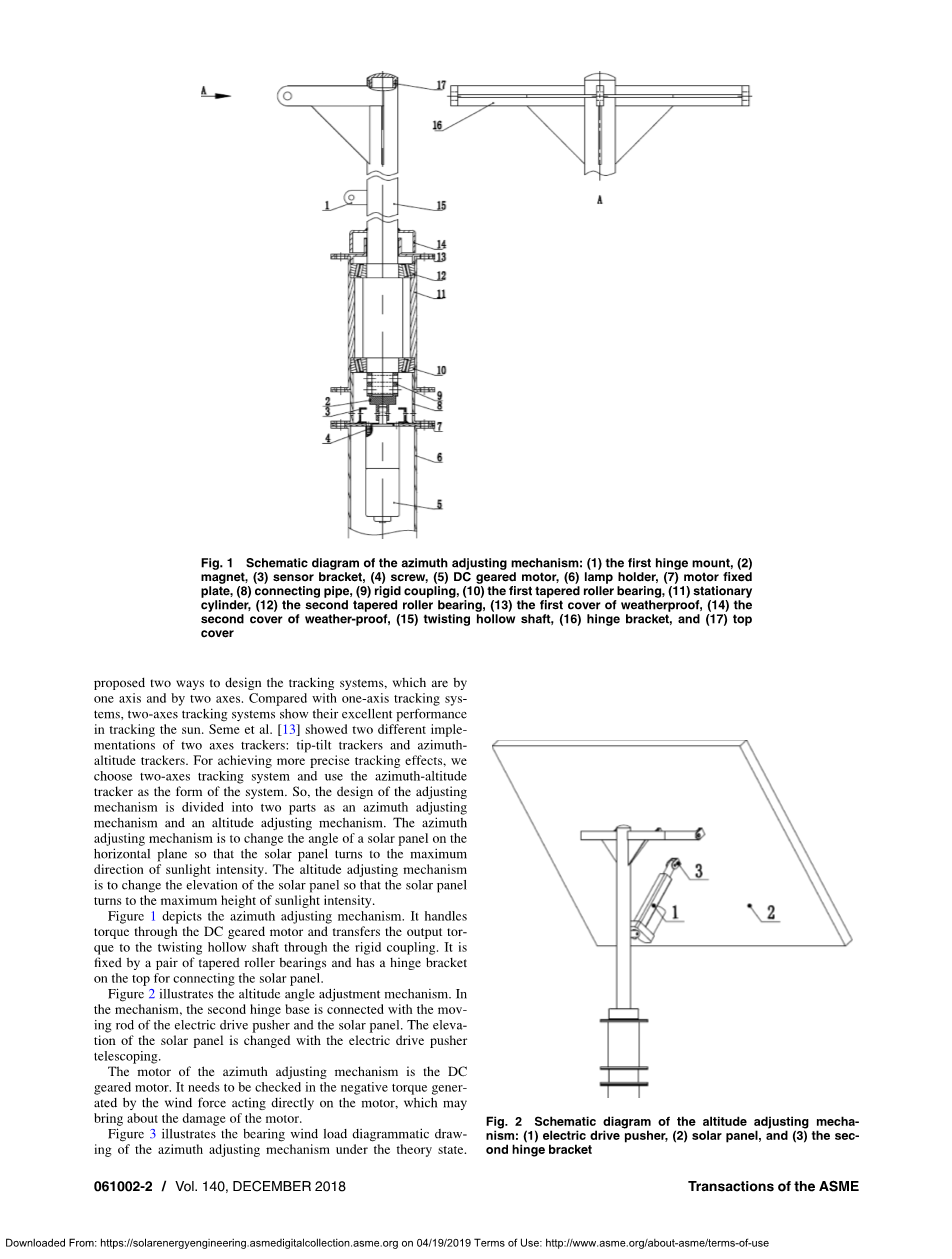
图2所示为系统所用的高度调节装置。在该装置中,将第二铰链基座与电驱动的移动杆以及太阳能板进行连接。此装置是根据电动推动器的伸缩量的变化来改变太阳能电池板的高度。
方位角调节装置所使用的电动机是直流减速电动机,此调节装置需要检测直接作用在电动机上的风力所产生的负扭矩,这可能会导致电动机的损坏。
图3为在理论状态下方位角调节装置的风力负荷轴承的示意图。当太阳能电池板所处的高度最小时,在水平方向上作用于太阳能电池板上的风力的有效面积最大。因此,它对承受风力的方位角调节装置的影响也是最大的。
假设风力将完全作用在太阳能电池板的右半平面上,如图3中的阴影区域所示,此时由于风力作用所产生的负转矩最大。风的动态压力公式是:
其中rho;为空气密度,其值为rho; = 1.29kg / m3;V为风速,在此次测试中整体风速为V = 28.40 m / s。 经过计算,风的动态压力为Pb = 520.23 N / m2。
作用在太阳能电池板的右半平面上的风力所产生的负扭矩为:
其中ɑ是太阳能电池板宽度的一半,数值为0.32 m;h是风力负荷下太阳能电池板的有效高度,数值为0.50 m;Pb为520.23 N / m2。经过计算,所得的负扭矩为13.32 N·m,而电机的额定扭矩为13.8 N·m。因此,方位角调节装置完全可以抵挡大风的袭击。
阳光的方向和高度检测
我们采用光电二极管阵列来检测太阳光的方向和高度。在图4所示的示意图中,D1-D7是光电二极管,它们分布在球面上。D3至D7用于检测太阳光的方向并测量五个方向上的太阳光强度。而D1,D5和D2分别用于检测太阳光的高度和测量三个高度的太阳光强度[14]。
在图5中,它描述了光电二极管阵列的相关连接。光电二极管的负电极连接到电源的负电极,光电二极管的正电极则通过10kOmega;的电阻连接到电源的正电极[15]。每个光电二极管的负电极用作光电二极管阵列的输出信号,它们的输出信号为V1至V7。根据光电二极管的特性,当太阳光进入光电二极管时,它会产生光电流,随着太阳光强度的增强,光电流也会在一定范围内逐渐增加。在每个光电二极管与相应的电阻串联连接的情况下,当光电流增加时,电阻的电压降会增加,从而减小光电二极管的负电极的电位。因此,V1至V7是模拟信号,它们的值与进入光电二极管的太阳光强度有关。
与此同时,我们采用电压比较芯片LM339N来比较来自光电二极管阵列的输出信号。图6所示则为LM339N芯片和光电二极管阵列之间的连接。我们使用了四个LM339N芯片,每个芯片都有四个独立的电压比较器,用于比较16对电位值,然后以数字信号的形式输出比较结果。LM339N芯片的输出信号会传输到MCU,由MCU进行处理。根据图6所示的连接方法,表1所示为对应于MCU访问V1,V5和V2的最小值时的I / O端口的逻辑信号。表2所示为对应于MCU访问从V3到V7的最小值时的I / O端口的逻辑信号,并且表中的X可为0或1。MCU通过读取相应的I / O端口,然后获得V3至V7的最小值以及V1,V5和V2的最小值。对应于V3至V7的最小值的光电二极管的所处的位置代表太阳光的方向,同时对应于V1,V5和V2的最小值的光电二极管的所处位置代表太阳光的高度。
自动跟踪系统
根据太阳光的方向和高度信息的集合,自动跟踪系统将控制信号输出到调节装置。同时,控制系统会收集调节装置上霍尔传感器反馈的运动和位置信息来形成闭环控制,使太阳能电池板的方向可以被精确调节,从而始终保持随时处于垂直于太阳光的入射方向的工作状态。
图7所示为方位角调节装置中的霍尔传感器的分布示意图。装置中的磁铁通过与之关联的刚性联轴器来进行转动,当磁铁接近装置中霍尔传感器的其中一个时,霍尔传感器将向MCU发出感应信号,从而获得方位角调节装置的运动位置信息。高度调节装置中的霍尔传感器则分布在电驱动推动器中,它们的数量总共有三个,分别安装在电驱动推杆的伸缩筒的中间与两端。此装置中的磁铁被固定在电动推动器的伸缩杆上。当电驱动推动器移动到底部、中间或末端时,与每个位置相匹配的霍尔传感器将向MCU输出感应信号,以此获得高度调节装置的运动位置信息。
Cinar等人[16]使用PLC作为跟踪系统的控制器,在经过对他们所用的控制器的研究以后,我们决定我们的系统使用类似的程序来控制调节装置的电动机。但是为了节省跟踪系统的成本,我们取消了对电压、电流和温度的检测,同时我们也不会将实际时间添加为系统中的参数。图10显示的是MCU执行程序流程图。首先,MCU会检测太阳光的方向以及方位角调节装置的运动位置。经过对比,如果它们两者不一致,MCU会将控制信号输出到方位角调节装置中,以便将其转到具有最大太阳光照强度的方向。在完成了对方位角调节装置的调整后,MCU会进行对太阳光的高度和高度调节装置的运动位置的检测。经过对比,如果两者不一致,MCU会将控制信号输出到高度调节装置,使其转到具有最大太阳光照强度的高度。在控制电动机或电动推动器工作之前,需要通过放大器电路来放大MCU向调节装置输出的信号。MCU通过输出两个信号来控制调节装置的移动,其中一个信号用于控制电动机或电动推动器在调节装置上的运动方向,另一个信号用于控制电动机或电动驱动推动器在调节装置上的工作状态。图8所示为电动机的驱动电路图。在这项研究中,公共集电极放大器电路用于放大MCU的输出信号从而驱动DPDT(双刀双掷)继电器和SRD(SRD是SANYOU RELAYS生产的继电器的类型名称;如果有必要, SRD继电器可以修改为电磁继电器)继电器工作。DPDT继电器负责在电源的正极和负极之间切换,从而转动电机或电动推动器的方向,SRD继电器则负责为电机或电动推动器供电[17]。
昼夜鉴定电路
昼夜鉴定电路通过光敏电阻来收集环境阳光强度,然后利用惠斯通电桥和LM339N芯片来处理其输出信号[18]。 图9所示为昼夜鉴定电路模块图,图中Rx是光敏电阻,其电阻值会受到阳光强度的影响。
当环境阳光强度较大时,电路鉴定当前处于白天状态,光敏电阻的电阻值较小。此时惠斯通电桥上桥臂中点的电位值大于惠斯通电桥下桥臂中点的电位值,LM339N芯片中的引脚2将逻辑信号0输出到MCU P3.3端口。而当环境阳光强度较小时,电路鉴定当前处于夜晚状态,光敏电阻的电阻值较大。此时惠斯通电桥上桥臂中点的电位值小于惠斯通电桥下桥臂中点的电位值。而LM339N芯片中的引脚2会将逻辑信号1输出到MCU P3.3端口[19-21]。
惠斯通电桥的平衡方程为:
为了使LM339N芯片的2脚输出一个逻辑信号1,即夜间状态,必须满足下面的不等式方程:
在R1和R2的值不变的情况下,如果R3的值较小,则将需要环境太阳光强度变得非常小,并且只有当Rx的值较大时,才能使上述不等式成立。相反,如果R3的值较大,则环境太阳光强度不需要非常小,即不需要较大值的Rx也可以使上述不等式成立。因此,选择不同的R3值可以设置所需的太阳光强度,使桥臂中点电位的相对值发生变化,即可以设置使昼夜鉴定电路发生响应所需的太阳光照强度。
图10描述了MCU执行程序的流程图。MCU在工作循环中通过扫描P3.3端口一次来确定环境阳光强度是否小于设定值。如果鉴定结果为环境阳光强度小于设定值,则打开路灯照明。如果鉴定结果为环境阳光强度未小于设定值,则关闭路灯照明。图11是真实的太阳能路灯照片,具有自动跟踪太阳光入
资料编号:[4080]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

