英语原文共 7 页
一种基于散斑相关散射矩阵的压缩型无参考光全息图像处理器
摘要:“全息”是指包含光的所有信息的图-包括振幅和波前信息。然而,由于目前电子学带宽不足,还没有实现光波前的直接测量。虽然参考场辅助干涉测量方法已经在许多领域得到了应用,但是该测量方法仍存在一些基础而又实际的问题。为此,我们展示了一种无参考光全息图像传感器。为了实现其功能,我们提出了基于散斑相关矩阵方法;光场信息通过一层薄薄的无序层后被记录下来,从单次拍摄的斑点强度图中恢复图像。当扩散层中的光传输被精确校准时,通过漫反射的自干涉可以获得光场信息。作为概念的证明,我们使用由常规图像传感器和扩散器组成的紧凑装置演示了三维光场的直接全息测量。
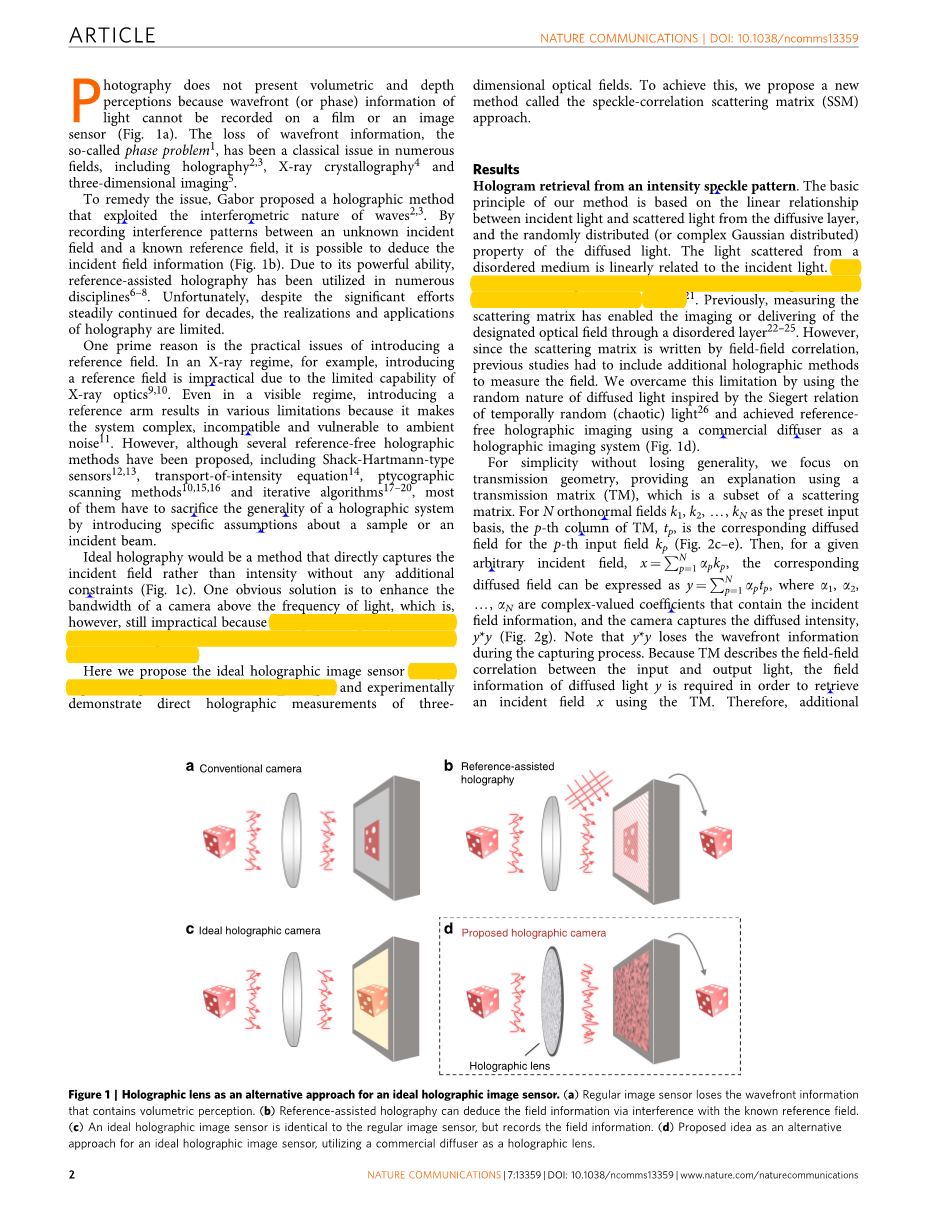
由于光的波前(或相位)信息不能记录在胶片或图像传感器上,使得摄影不呈现体积和深度感知。波前信息的丢失,即所谓的相位问题,是许多领域中的经典问题,包括全息照相,x射线晶体图和三维成像。为了解决这个问题,Gabor提出了一种全息方法,该方法利用了波的干涉特性。通过记录未知入射场和已知参考场之间的干扰模式,从而推断出入射场信息。由于其强大的能力,参考全息技术已被应用于众多学科。不幸的是,尽管持续了几十年的巨大努力,全息术的实现和应用仍然有限。
一个主要原因是引入参考领域的实际问题。例如,在x射线区,由于x射线光学性质的限制,引入参考场是不切实际的。即使在可见光的范围内,引入参考臂也会造成各种限制,因为它使系统变得复杂、不兼容,并且易受环境噪声的影响。然而,尽管已经提出了几种无参考全息方法,包括Shack-Hartmann型传感器,强度传输方程,平面图扫描方法,和迭代算法等,但大多数方法不得不通过引入关于样品或入射光束的特定假设来牺牲全息系统的通用性。
理想全息术是一种直接捕捉入射场而不是强度而不受任何附加约束的方法。一个明显的解决办法是提高摄像机的带宽,使其高于光的频率,然而,这仍然是不切实际的,因为光学频率比目前最先进的电子技术快几个数量级。
在这里,我们提出了理想的全息图像传感器,使用常规图像传感器和无序层,并通过实验演示了三维光场的直接全息测量。为此,我们提出了一种新的被称为散斑相关散射矩阵(SSM)的方法.
结果:从斑点强度图中复原全息图。该方法的基本原理是基于入射光与漫散射光的线性关系,以及漫射光的随机分布(或复高斯分布)特性。在无序介质中散射出的的光与入射光呈线性关系。这种入射光场和散射光场之间的线性关系可以用散射矩阵描述的。以前,测量散射矩阵使图片或者设定好的光场通过无序层来实现。
然而,由于散射矩阵是由场与场之间的关联性来得到的,以前的研究必须包括额外的全息方法来测量场。我们利用时间随机(混沌)光的Siegert关系激发的漫射光的随机性克服了这一局限性,并利用商用扩散器作为全息成像系统实现了无参考光全息成像。
为了简单而不是通用性,我们重点关注几何传播路径,因此我们使用散射矩阵的子集——传输矩阵(TM)来对理论进行解释。我们将N个正交场作为输入元素分量。TM的第p列tp代表与第p个输入元素对应的输出场分量。对应任意的输入场,我们可以表示为,与之对应的输出场可以表示为,其中,,hellip;,表示包含入射场信息的复值系数。相机记录的是输出场强。在摄像过程中的波前信息会丢失。因为TM描述了输入光和输出光之间的场-场相关性,所以需要漫射光y的场信息以便使用TM来检索入射场x。另外,在使用TMs的常规研究中必须采用全息方法。
在这里,利用散射场的随机性,我们发现校准的TM,t1,t2,y,tN和强度快照y * y足以用于入射场检索。我们提出了散斑相关散射矩阵Z,
其中lt;gt;表示空间平均,是一个正态化常数。扩散光场的随机性使四阶矩和二阶矩之间形成了一种有趣的数学关系。
其中E1,E2,E3和E4是任意随机扩散的光场。lt;gt;表示统计平均。这样,我们就可以得到
其中。从的一般正交性的不相关扩散场出发,尽管正交性的假设已被普遍接受为通过扩散层传输,但是根据随机矩阵理论,高散射介质和他存在相关性。尽管如此,我们注意到,对于扩散层,这种相关性是可以忽略的,这是在本研究中使用的。如果存在这些相关元素,则一旦对tm进行校准并对其特征基进行分析,就可以对其进行数值过滤。由于方程(3)中的第二项包含其他随机场的空间平均值t *py*和tqy,它随着光学采样模式(M)的数目与预设输入模式(N)的数目之间的比率(G)的增加而消失。因此,对于足够大的gamma;,方程(2)的第二项消失,z矩阵的秩变的统一;,其唯一的特征向量是入射场。
实验验证:为了证明所提出的想法,我们通过实验构建了设置(图2a,b)。除了漫射器,我们插入一个光圈来阻挡环境光,还有一个偏振器可以最大限度地提高散斑的可见度。为了避免重复的光学信息,我们通过调整漫射器和相机之间的距离,将相机平面处的散斑粒度设置为与单个相机像素相当。使用He-Ne激光(波长,633nm),通过空间光调制器(SLM)测量TM。
因为检索的全息图被映射到预设输入的基础上,所以输入模式的数量N确定全息图像传感器的视场(FOV)和衍射极限光斑尺寸(即分辨率)。光学采样模式M的数量涉及源自等式(3)的第二项的固有信噪比(SNR)。在我们的系统中,我们使用66*60(N = 3,960)等间隔空间频率模式作为输入基础。这相当于5.28*4.00 mm的FOV和80*67 mm的衍射极限光斑尺寸。此外,我们设置512*512个中央摄像机像素(M = 262,144)作为输出模式,相当于gamma;=66.2。
首先,我们通过成像入射场验证了我们的思想的可行性,这些光场是由调制器(调制)或二值掩码(幅度调制)调制的。我们使用一个4-f准成像系统,使全息像传感器的焦位共轭到二值掩模的位置,同时提高了全息像传感器的效率。Z矩阵利用传输矩阵TM和测量的强度散斑来进行计算。重建图像的振幅和相位如图所示,尽管噪声主要来源于第三个公式的第二项,但入射场还是得到了很好的重建。
为了抑制噪声,我们还提出了一种改进的G-S算法。我们使用测量的传输矩阵作为一个运算符来代替原始算法中的傅里叶变换,利用y的模作为我们的约束条件。算法将从xrsquo;0开始,迭代操作会一直重复,直到结果到达我们设定的终止条件。值得注意的是,我们使用的迭代算法不需要任何附加的假设、自由变量或无关变量。最终的迭代结果如图3中的d,g所示。由于传输矩阵中只记录了一部分有限的傅里叶模值,所以在检索到的振幅中可以观察到了低通滤波的影响。除此之外,我们还利用其他几个相位和振幅的调制场对算法进行了测试,结果也在图3(h-m)中展现出来。
抗噪性能。为了分析我们的方法的抗噪性能,我们进行了数值模拟,我们在传输矩阵和测量的散斑强度图中,都添加了高斯白噪声。我们通过改变了gamma;(gamma;=M/N)或者说本征噪声水平以及高斯白噪声的信噪比来进行一系列的模拟仿真。为了系统地研究噪声对图像重建的影响,我们研究了入射场和重建场之间的关联性,我们使用相关性来定量分析了相关散射矩阵法以及添加迭代算法的相关散射矩阵得到的重建图片与原图片的相似性。如图所示,当我们将gamma;设置的足够大的情况下,我们在对散射相关矩阵进行适当采样和测量,才可以保证该方法的有效性。重要的是,当将gamma;设置的足够大时,该方法即使在噪声极高的情况下也能成功地检索全息图像(例如,信噪比SNR=1)。同时,如果gamma;很小(例如,gamma;等于4),利用改进的G-S算法也可以在信噪比很大的情况下(例如SNRgt;10)很好的改进重建全息图的质量。在数值我模拟中,我们使用的N=1024,M的值则取决于gamma;。数值模拟实现的详细步骤和使用的MATLAB代码可在补充方法中找到。
真实物体的全息图拍摄:为了证明我们的方法可以设计制造独立的三维全息图像传感器,我们准备了一个真实的目标进行实验,包括两个尺寸为5*5*5mm的骰子,两个骰子之间相隔40厘米。我们将激光束照射到目标上进行照明,并测量反射光场。为了确认该种方法的成像质量,我们进行的数次聚焦,范围从-35里面到 35厘米。如图所示,结果显示了目标在各个位置的上的成像结果与预期的一致性。值得注意的时强度斑点和随机相位是由物体的漫反射造成的,为了得到更清晰的成像结果,我们通过用低亮度的准激光照明进行25次测量,抑制了强度散斑亮度的提高。对于给定的位置,所有检索到的25个部件都在数值上与给定位置相对应,并且它们的振幅部分进行了复合。图5l-r所示的复合结果显示了每个数值重聚焦位置的目标的清晰图像。这些结果证明了我们设计的全息成像方法的能力,甚至对复杂形式的入射场也有很好的效果。一旦校准了系统的TM,只要不改变物理结构,系统就可以正常工作。我们观察到,即使在没有任何额外的温湿度控制的情况下,校准一个月后,全息成像的质量也没有显著下降。
总而言之,我们从理论上提出并实验证明了这种无参考全息成像传感器的可靠性。该方法可以直接反演相位,而不需要参考光束辅助。利用随机属性,光场信息可以从测量强度图像中得到的。其原理是用随机矩阵描述光在光学中的传输过程,并且两种不同输入的光传输模式之间不存在有效的相关性。为了证明所提出的思想,我们提出了一个紧凑和无参考的全息图像传感器,用它可以直接测量各种光场图像。
我们应该强调,目前的方法从根本上不同于以前报道的基于散斑相关或鬼成像的方法。举个例子,常规的散斑相关方式比如鬼成像,单像素成像,基于记忆效应成像和基于Siegert关系的成像,他们都是只能恢复图片的振幅信息,因为他们使用的散斑相关是强度相关,因此,图像的波前信息天然的就会被丢失。另外,与现存的基于传输矩阵的方式不同,我们的工作不需要使用参考光束,这一点对扩大该种传感器的适用范围起到了很重要的作用。我们的方式也不需要对入射光信息和参考光信息有任何的前置知识储备,你可以之间使用这个传感器进行成像输出。从技术角度看,利用多次光散射提供的更大的自由度,可以将该方法推广到图像偏振成像、波长相关成像以及近场成像。虽然该方法在使用前需要进行精确和耗时的校准步骤,但未来更快的传输矩阵测量技术将进一步缓解这一技术问题。
因此,我们期望我们的方法能够为传统全息方法所遇到的困难提供一种解决方案。此外,该方法的无理想化假设和无参考光的使用对其实用化的推进是很有利的,同时,我们的方法也可以扩展到在x射线范围内直接进行全息测量。根据我们的方法生产出来的传感器具有紧凑性和仅需单次测量的优点,而这些特性将有利于更实际的应用,如在智能手机中应用的全息相机,或用于护理点诊断应用的定量相位。
方法:我们使用的配件主要有:SM1L10, Thorlabs Inc.镜头管作为全息镜头的外壳,在镜头的正面,我们加上了一个长方形的光圈(4*53mm,定制)。一个型号为ED1-C20, Thorlabs Inc.的光学多重散射介质以及一个型号为LPVISE100-A, Thorlabs Inc.的起偏器。我们将他们都放在了镜头管中。入射激光器的极化方向被设置为平行极化。我们直接用照相机来组装镜头,镜头参数为(4,242*2,830 个像素; 像素大小为3.1 mm; MD120MU-SY, XIMEA GmbH,并且添加有适配器(SM1A9, Thorlabs Inc.)。多重散射介质和检测像素阵列之间的距离估计为43mm,这包括照相机内部的附加空间。
传输矩阵的测量:我们利用了第五十四篇参考文献中给出的测量传输矩阵的方法,并对其进行了一定的改进,具体的光路图可以在支撑材料中的图一见到。我们使用氦氖激光器 (HNL050L, Thorlabs Inc.) 构造了一个迈克尔逊干涉仪结构的光路,在样品臂中具有一个空间光调制器。在经过干涉系统之后,我们利用一个4f系统将光束进行缩束,缩小倍数为3倍。缩束的目的是与空间光调制器(792*600个像素点,像素点直接存在20微米间距,型号:Hamamatsu photonics K.K.)的数值孔径相匹配。我们使用一个60*60的方形(N=3960)的低通傅里叶模式作为输入基元,这相当于视野为5.28*4.00平方毫米,分辨率为80*67微米。输出模式数为图片中间相机的像素512*512(M=262144)。对于第p个输入模式,我们对其进行三次干涉,得到光场强度分别为I1,p,I2,p,I3,p,其中,三次干涉的全局相位为0,2pi;/3,4pi;/3。利用相位检索算法,我们可以从三幅相移干涉图中提取输出场ti。对于得到的输出场中的参考光,其在空间中分布不均匀,并且通过了全息成像单元,因此,其会导致严重的相差,并从Z矩阵中反映出来,为了对参考光造成的不利影响进行补偿
资料编号:[5496]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

