英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
汽车成像导管与纤维束中微型显微镜物镜的光学设计
Cheon-Seog Rim *
韩南大学物理系,韩国大田306-791,大德谷133
(2010年8月3日收到:2010年9月16日修改:2010年9月29日接受)
在相干反斯托克斯拉曼散射(CARS)显微镜的研究中,由于使用了传统的显微镜物镜,因此将它们引入活体受到限制。梯度折射率(GRIN)棒透镜可能是一种解决微型显微镜目标的体内汽车显微镜。然而,由于固有的大量色差,GRIN棒透镜不能用于此目的。汽车成像导管由微型显微镜物镜和纤维束组成,可导入活体进行微创诊断。为了设计导管,我们必须首先调查设计要求。然后利用设计策略和强大的计算能力对光学设计进行处理,达到设计要求。我们报道了一种微型物镜系统,它具有衍射受限的性能,并且完全纠正了体内汽车成像导管的色差。
关键词: 微型物镜,微型物镜,汽车显微镜,相干体, 反斯托克斯拉曼散射
OCIS代码: (220.0220)光学设计与制造; (110.0180)显微镜; (220.3620)透镜设计; (300.6230)光谱学,相干反斯托克斯拉曼散射
一 现状介绍:
近年来,非线性光学(NLO)显微镜被用来观察活体组织的形态学细节,这是超声或磁共振成像无法解决的问题。NLO显微镜利用双光子激发荧光(TPEF)、二次谐波产生(SHG)、和频产生(SFG)、相干反斯托克拉曼散射(CARS)等信号,可以与汽车显微镜与TPEF、SFG显微镜等技术相结合。这就是为什么组合(或多模态)显微镜可以看到亚细胞复杂结构,不能很好地解决单一的NLO显微镜。不同的NLO成像方法各有其独特的优势[13]:TPEF可以用来可视化蛋白质、离子荧光标记或特定的自荧光结构;SHG和SFG对胶原纤维等非中心对称分子组装具有选择性;car对脂肪细胞等富含脂肪的结构天生敏感。
汽车显微镜与其他显微镜相比,它是一种更理想的工具,因为它允许无标签的强振动成像。因此,较好地构建了基于汽车散射显微镜的多模态NLO成像系统。
为了生成汽车信号,我们必须使用两个激光脉冲频率的omega;p泵浦光和斯托克斯omega;s量。可以说,汽车信号生成有效的共线激发几何与泵之间的紧密聚焦,没有时间延迟(omega;p)和斯托克斯量(omega;s)。omega;p-omega;s,如果频率不同,匹配分子特定频率共鸣的,蓝移和强烈的汽车在omega;AS = 2omega;p-omega;s发出信号。从这个汽车信号中,得到了亚微米分辨率的三维无标签图像。在目前报道的汽车显微镜中,使用的是传统的显微镜物镜,因此它们在进入活体时受到限制。梯度指数(GRIN)镜片可能是体内导管植入的一种解决方案。然而,由于固有的大量的色差,GRIN镜头不能利用集中两个脉冲的频率omega;p和omega;s点。为了插入汽车微型显微镜物镜的光学设计,我们需要一种微型物镜系统,如GRIN物镜,在泵浦和斯托克斯光束时没有聚焦误差和偏差。我们将在以下几节中讨论与成像纤维束连接的微型物镜系统的设计。
二 设计要求的研究
2.1 紧密聚焦和波长
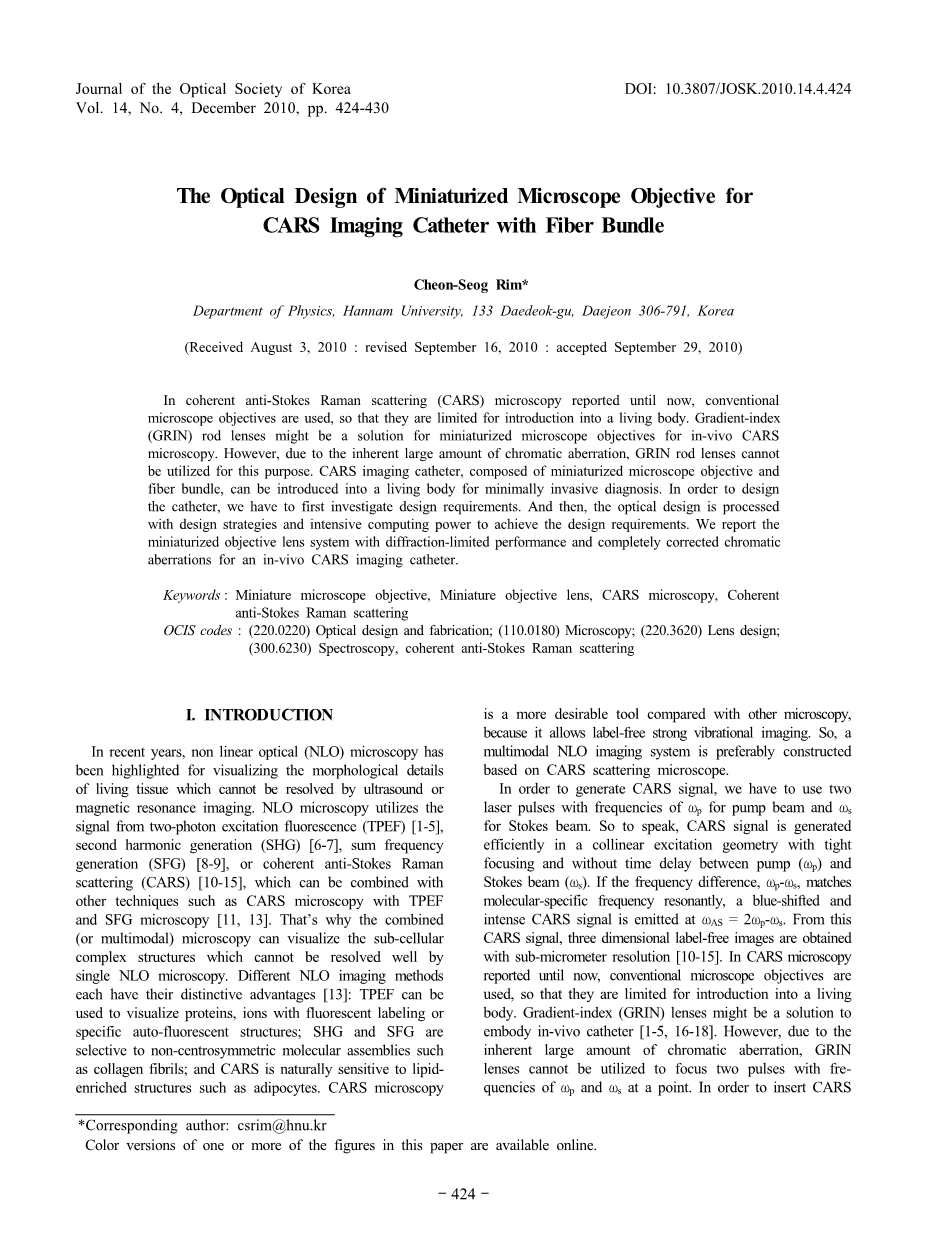
图1给出了激光扫描车(相干反斯托克斯喇曼散射)显微镜的典型原理图。如图1所示,将两个不同波长的脉冲同步聚焦于样品内部,然后转化为散射光信号,将正向探测车(F-CARS)、epi-探测车(E-CARS)、双光子激发荧光(TPEF)、和频产生(SFG)信号等形态细节可视化。
从光学的角度设计,两个脉冲泵(omega;p)和斯托克斯(omega;s)光束集中与彩色畸变条件共同的关注。事实上,汽车信号与诱导的三阶极化有关,
图1 典型的激光扫描原理图汽车(相干反斯托克斯拉曼散射)显微镜,实现无损分子成像从提出检测汽车(F-CARS) epi-detected汽车(E-CARS),双光子激发荧光(TPEF)或频率和代(SFG)由两个同步脉冲信号频率omega;p和ws。D 二向色镜。
Ep(omega;p)和Es(omega;s)是泵和斯托克斯光的电场和Ep是第二个与泵浦光在汽车中的交互过程。delta;函数意味着集成的条件满足
(1)
汽车信号的强度可以表示为:
(2)
由式(1)和式(2)可知,小车信号与泵浦光强的次幂乘以Stokes光强(is)的次幂成正比。因此,汽车物镜系统应满足限衍射性能和无色差条件,将两个不同波长的脉冲聚焦到一个点上。
同时,为了确定泵浦和斯托克斯光束的波长,我们参考了Conor L. Evans及其同事的研究成果。他们已经用817纳米的泵浦光束和1064纳米的斯托克斯光束获得了汽车和TPEF组织的联合图像。由于我们期望基于CARS显微镜的多模态非线性光学(NLO)成像,我们将设计波长设置为817 nm和1064 nm。
2.2 数值孔径和清晰孔径
数值孔径是用来指定光学系统的集光功率,它可以表示为目标空间(光纤侧)或图像空间(样本侧)。光学系统捕捉到的汽车信号量与样品侧数值孔径的平方成正比(NA2S),光学分辨率与数值孔径的一次方成正比(NAS)。
因此,为了确定合适的NAS,我们参考了H. Wang和同事的研究。他们使用的是传统的针状物镜,即奥林巴斯公司的微探针物镜(MicroProbe objective, MPO)镜头,外径1.3 mm, 0.5 NAS用于水浸。另外,在奥林巴斯的网站上,我们还可以找到另一种外径为3.5 mm, NAS为0.7的MPO镜头。因此,我们可以合理地确定数值孔径和清晰孔径的设计要求:NAS的浸水范围为0.5 ~ 0.7;由于我们使用的光纤束外径为0.7 mm,接受数值孔径为0.35,所以清晰孔径(CA)的直径范围为0.7 mm到2.5 mm左右。
2.3 视野和放大
前面提到的MPO镜头视野220micro;m在样本(fov)和纤维束的外径700micro;m(0.7毫米)。和很多汽车报道论文表明,图像区域约75micro;m或100micro;m宽。因此,如果我们设置fov 220micro;m,放大(M)将0.314 (= 220/700)。从几何光学上看,放大率(M)等于数值孔径的比值(NAF/NAS),即NAF将从0.16到0.22的范围。最终,我们可以
确认设计要求的一致性,接收正弦角为0.35的光纤束使车辆信号进入每个光纤芯,即30000个光纤芯。
2.4 远距离和工作距离
在远心系统中,一个或两个瞳孔位于无穷远处,主光线平行于光轴[21]进入或离开系统。为了最大限度地将epi探测到的汽车反射回30000个光纤核心,我们需要保持光纤侧的远心性。
前面的MPO透镜的焦距200micro;m不得优化汽车显微镜。相比之下,普通的GRIN透镜工作距离为几十微米,样品散射的影响较小。需要注意的是,为了获得适当数量的散射信号,在epi探测到的汽车成像中,必须仔细确定工作距离。如果我们把前面提到的埃文斯的研究[11]的汽车组织成像是100micro;m的深度,我们可以设定工作距离100micro;m。
2.5 总轨道长度
汽车成像导管必须在血管内自由移动,不受限制。为了实现这种自由移动,我们需要最小化从对象到图像的总跟踪长度(TTL)。通过K. Carlson和同事对注射成型塑料微型物镜在体光纤共焦反射显微镜的研究,我们可以得到17.5 mm或20 mm的TTL信息。因此,将TTL的要求设置在10mm到20mm之间是合理的。
三光学设计
为了满足第二部分的设计要求,我们需要初始镜头数据和策略。作为优化的初始数据,我们在图2中给出了放大40倍、NAS为0.7的常用显微镜物镜。该透镜系统的有效焦距(EFL)为4mm,孔径直径为8mm。注意,从物体到图像的总轨迹长度(TTL)为195毫米,而从第一个透镜表面到图像表面的轨迹长度(TL)仅为39毫米。然后,为了满足总轨道长度(TTL)和净孔径(CA)的要求,我们必须先将TTL最小化。这就是为什么最小的TTL导致最小的CA。在这里,我们使用一个想法,在物体和第一个透镜表面之间插入一个或两个透镜,以便将195毫米的TTL减小到十分之一或二十分之一。这就是为什么透镜(es)可以准直离开光纤束的激光束,
图2 常规显微镜物镜系统放大倍数为40times;,NAS为0.7。该系统的有效焦距(EFL)为4mm,孔径直径为8mm。注意,从物体到图像的总轨迹长度(TTL)为195毫米,而从第一个透镜表面到图像表面的轨迹长度(TL)仅为39毫米。
使透镜系统达到最小TTL的结构。在优化过程中,我们希望手动将光阑移动到不同的位置,以满足远心条件。
由于相干反斯托克斯拉曼散射是一种非线性效应,它与诱导的三阶极化的平方成正比,因此信号只在一个焦点处产生。因此,CARS物镜系统必须满足泵浦光817 nm和斯托克斯光1064 nm的衍射受限性能和无色差条件。为了达到无像差的条件,我们将通过对每个偶极子的优化过程找到各种玻璃对。And 我们 构成 价值 函数 (psi;) 组成的平方误差的总和函数的畸变量,
(3)
其中wi、ei、ti分别表示阻尼最小二乘算法的权重因子、像差、目标值(通常为零)。Fi、Wi、Ri表示场、波长和射线。Delta;xi和Delta;yi表示横向光畸变图像平面上,z是光轴。首先,为了减少价值函数(psi;),我们专注于大啤酒杯三阶像差的校正,一阶轴向和横向色差,色球面像差,彩色彗差。这就是为什么我们从一个设计知识知道,赛德尔三阶像差和一阶色差对于限衍射性能是最重要的。然后根据斯涅尔定律对一般射线进行修正,从而得到优化过程。在一般的射线优化中,我们允许样品表面有一个曲率来校正场曲率。这就是为什么弯曲的图像表面是修正固有场曲率像差的最有效和最简单的方法。这在共焦反射显微镜或光学相干层析成像中很容易发现,在这种成像中,使用梯度折射率(GRIN)透镜作为显微镜物镜。优化过程采用10.1版本的Code-v。
因此,我们将小型化的光纤束车载成像导管显微光学系统如图3所示,设计要求见表1。我们可以确认所有预定义的设计要求都得到了满足。在第四部分,我们将依次讨论光学性能。
图3 用于汽车成像导管的微型显微镜物镜,其中光纤束的总径径比(TTL)通过第一个透镜大大减小到10.4毫米。与图2比较。该物镜系统的EFL为2.975 mm。
表1 设计数据
|
设计要求 |
目标 |
设计 |
|
紧密的关注 |
Aberration-free |
Aberration-free |
|
王 |
817 nm, 1064 nm |
817 nm, 1064 nm |
|
氟化钠 |
0.16 - 0.22 |
0.22 |
|
NAS |
0.5 - 0.7 |
0.7 |
|
CA |
0.7 - 2.5毫米 |
1.8毫米 |
|
FOVF |
0.7毫米 |
0.7毫米 |
|
视场 |
220年mu;m |
220年mu;m |
|
米 |
3.2 |
3.2 |
|
电话 |
0° |
3.6° |
|
WD |
100年micro;m |
100年micro;m |
|
TTL |
10 - 20毫米 |
10.4毫米 |
表1总结了设计要求的数据。W表示波长,氟化钠和NAS表示数值孔径纤维和示例,CA表示通光孔径的直径,FOVF和视场表示的视野在纤维和示例,M表示系统放大,T表示远心度定义主要射线和光轴的夹角,WD表示工作距离,TTL表示总长度从纤维到样品。
四 光学性能及讨论
我们知道,最重要的是消除单色和色差,因为相干反斯托克斯拉曼散射(CARS)信号只在一个焦点产生,并且与激光束强度的三次方成正比,即Ip2乘以is。切向(yz)和矢状面(xz)的图像质量如图4所示。在判断图像质量之前,我们需要推导出光学性能的一个关键准则。最常见的首选标准是艾里盘的半径,它决定了光学系统是衍射有限从横向射线像差是在盘内或外部。已知艾里斑半径(R)可以由式(7)简单地计算出来,
(4)
lambda;表示波长和NAS表示样品的数值孔径。泵束817海里, R = 0.71。斯托克斯束1064海里,R = 0.93。 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20864],资料为PDF文档或Word文档,PDF文档可免费转换为Word

