
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
适应大波前变化的自适应夏克-哈特曼波前传感器
摘要:夏克-哈特曼波前传感器(SHWFSs)通常在探测器上具有固定的子孔径区域,以确定波前偏差的最小值和最大值,或测量的动态范围。我们介绍了一种有效的方法,命名为自适应夏克-哈特曼波前传感器(A-SHWFS)。A-SHWFS用于通过使用电子调制掩模阻断或解锁所需透镜来重新配置检测子孔径区域。该掩模通过将液晶显示器(LCD)面板放置在透镜阵列前面来增加或减少可测量的像差量。根据发送到LCD的控制信号,可变的、依赖于应用程序的阻塞模式(水平、垂直、对角线、不均匀)使其成为具有可变动态测量范围的自适应高效传感器。该方案也适用于有限区域内波前严重畸变时的区域阻塞。
1.介绍
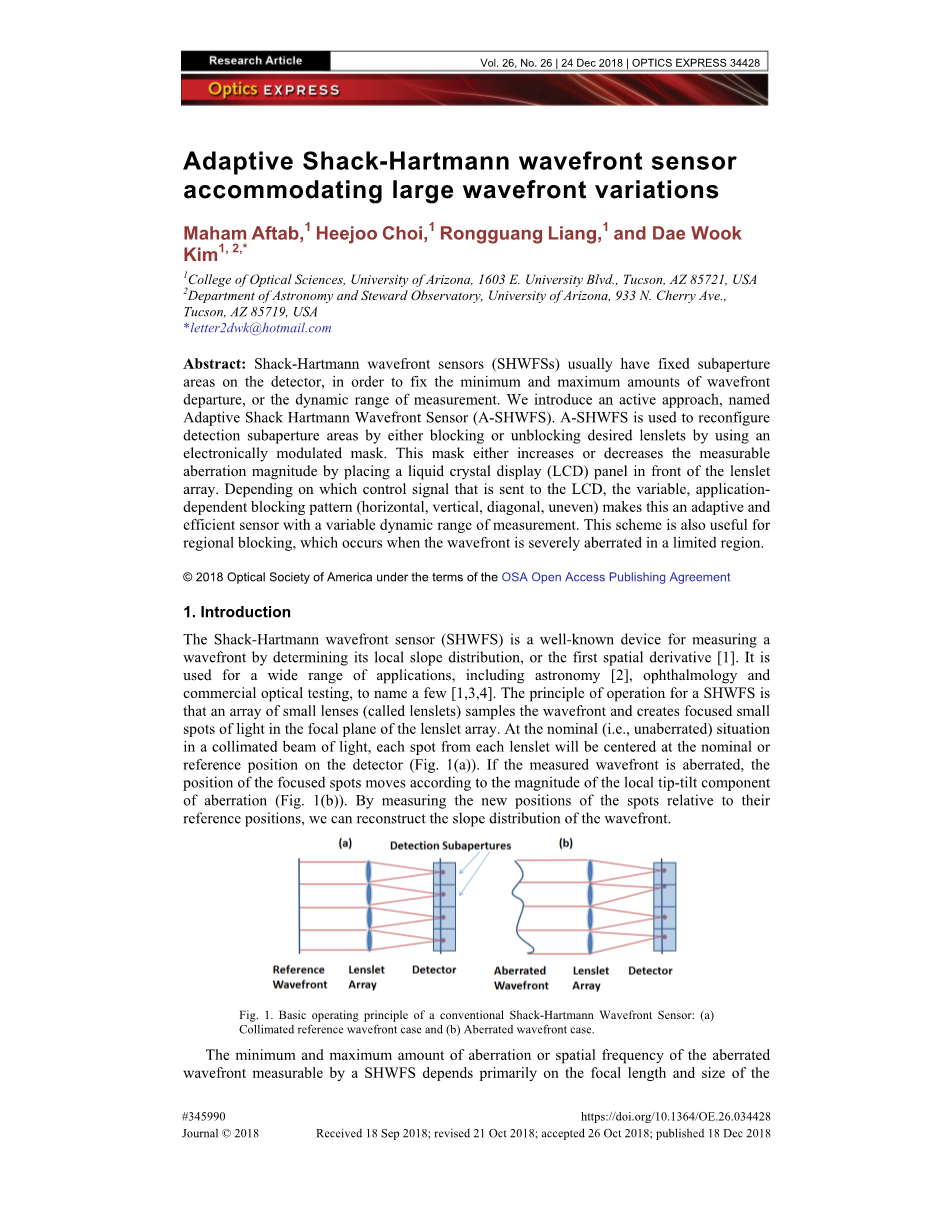
夏克-哈特曼波前传感器(SHWFS)是通过确定波前的局部斜率分布或第一空间导数来测量波前的著名设备[1]。它被广泛于天文学[2]、眼科学和商业光学测试,举几个例子[1,3,4]。SHWFS的工作原理是一个小透镜阵列(称为透镜组)对波前进行采样,并在透镜组的焦平面上产生聚焦的小光点。在准直光束中的标称(即非标定)情况下,每个透镜组的每个点将集中在探测器上的标称或参考位置(图1(a))。如果测量的波前发生畸变,聚焦点的位置将根据畸变的局部尖端倾斜分量的大小移动(图1(b))。通过测量点相对于参考位置的新位置,可以重建波前的斜率分布。
图1.传统的夏克-哈特曼波前传感器的基本工作原理:(a)准直参考波前盒;(b)畸变波前盒
SHWFS测量的畸变波前的最小和最大像差或空间频率主要取决于透镜和探测器子孔径的焦距和大小。在天文应用中,SHWFS的固定优化设计可由各种因素决定,如大气湍流。一般来说,需要权衡SHWFS的分辨率和动态范围,即如果检测子孔径较小,则波前采样更精细,并且产生更高的空间分辨率,但对于固定焦距测量的最大像差量会受到限制。我们将动态范围定义为系统可测量的最大和最小波前斜率值。传统的SHWFS具有固定的动态测量范围,但近年来,人们提出了几种适用/可重构SHWFS系统的概念。
提高传统SHWFS动态范围的一种方法是通过在小透镜阵列和检测平面之间的附加平面上进行测量,跟踪哈特曼点沿光轴的移动,并使用预测算法将这些点匹配到正确的测量位置[5]。[5]中的方法还利用可移动的中继透镜和照相机组件在哈特曼点成像和瞳孔成像之间切换,以便将透镜映射到瞳孔上,从而为探测器子阵列建立最佳尺寸和分布。另一种新方法使用了一种算法,该算法可以解开点位错,并将点分配给正确的子孔径,从而消除局部位置模式中的不连续性,这些局部位置是包裹的模P,其中P是透镜螺距[6]。在[7]中提出的技术使用两种不同的测量,一种是波前的常规图像,另一种是来自经典的夏克-哈特曼传感器的图像,来估计测量的像差的参数化描述。在[8]中,通过外推一个迭代的二维样条函数,将这些点分配给它们各自的参考点,提出了对相邻透镜组焦点位置的估计。
还有其他方法使用特殊设计的设备。例如,一种散光透镜阵列,它为每个光斑提供一个特征标记,即使光斑超出其检测子孔径,也能对其进行明确的识别[9]。另一种方法描述了一种具有最小测量周期数的编码算法,如果使用放置在微透镜阵列前面的空间光调制阵列打开和关闭子孔径,则允许确定的点分配[10]。[11]中的MEMS技术用于通过单个地址提高动态范围。该方法改变了单个透镜支撑架的机械共振频率,并通过检测由该点运动产生的线图像,从特定透镜中识别出焦点。在Rha等人的研究中[12],中提出的传感器用一个微全息阵列取代了传统的透镜组,该阵列为每个焦点提供了一个可辨别的模式,并采用了一种模式匹配技术,该技术利用重建图像和模板图像之间的互相关。在Zhao等人的研究中[13],使用写在相位调制LCD模块上的可重构菲涅耳透镜阵列,研究了使用衍射光学透镜模式(编码在空间光调制器上)作为微透镜阵列的数字SHWFS的定制。在Yoon等人的研究中[15],使用可平移板,其子孔径与透镜阵列共轭。通过移动平板,所需的透镜可以被阻挡,并且通过在平板在测量之间转换的位置进行多次测量,所有焦点都可以正确地与其各自的子孔径相关联。
我们提出了一种自适应SHWFS(A-SHWFS),能够动态地改变液晶镜头掩模。这使得传感器可以根据系统中存在的像差改变空间采样的子孔径和分布。虽然之前关于这一主题的工作可能已经实现了类似的目标,但我们的方法提供了一种简单而强大的技术,使适应性强的SHWFS系统可以集成到大多数现有的基于SHWFS的设置中,而无需对系统进行大修。通过改变系统参数(例如增大透镜的大小)也可以实现类似的目标,但这意味着对系统进行定制和固定的硬件(可能还有软件)更改,例如关闭透镜阵列。我们的方法对系统设置进行了一次性修改,修改后的自适应采样只能通过软件控制来实现。它也不使用任何复杂的设备或繁重的计算。此外,它允许检测子属性的高效、甚至不规则和自适应重新配置。例如,如果测量的波前相对于整个波前在一个小区域内高度畸变,则只有一小部分检测区域可用于重新配置,以适应这种局部的高波前斜率变化。其余检测区域仍能保持高采样率。此外,它在实现方面提供了很大的灵活性,并且易于应用更改。例如,用户可以根据应用程序的目标和实现细节修改切换到较大检测子孔径或应用于波前斜率变化较大区域的阻塞/屏蔽类型的标准。本文讨论了利用完全成熟的经济解决方案、电子调制LCD面板和软件控制来实现我们的技术的思想和实现。
2.自适应空间采样与模态波前重建
2.1使用LCD面板的主动调制透镜阵列
动态阻塞和解锁透镜组的关键是在透镜组前面放置一个LCD屏幕(不带背光照明装置),如图2(a)所示。通过连接到LCD屏幕的计算机处理不透明(即黑色)和透明(即白色)图案,可以控制通过LCD的光传输。图案(如方框、线条、不规则区域等)为黑色的像素将没有光线通过它们,相应的透镜将有效地变为非活动状态。通过将液晶显示器上的阻挡图案的线条或正方形与透镜组进行匹配,我们可以控制每一个透镜组或每一组透镜组,使其具有任何想要的、可适应的图案。第3.2节给出了适用于真实原型系统的匹配和对准过程的详细信息。所述寻址图案为白色的LCD区域将使光通过,相应的透镜或透镜变为活动状态。本质上,我们是动态地改变透镜阵列的活动模式,要么是在整个波前区域,要么只是在某些区域。然后,当我们阻塞某些透镜时,相应的探测器子孔径区域不需要聚焦点,现在可以用于相邻点的扩展探测器子孔径区域。这使得最初无法测量的高畸变波前可以在不受相邻透镜之间混合点限制的情况下被检测到,而牺牲了图2(b)所示的空间采样分辨率。当然,这将在波前映射的动态范围和空间分辨率之间进行权衡,并且可以针对特定情况进行积极优化。然而,重要的是,检测灵敏度保持不变。
图2.(a)使用主动调制LCD透镜阵列掩模的A-SHWFS的示意图布局。(b)描述液晶透镜阵列掩模(左)和相应的探测器子属性(右)是如何从完全未阻塞(顶部)动态更改为部分阻塞(底部)的示意图。左边的方块表示从计算机发送到LCD屏幕的图案
2.2聚焦点中心化算法
由于来自LCD内部结构的散射以及来自透镜阵列上金刚石车刀痕迹的衍射效应,与没有LCD掩模的标准SHWFS相比,焦平面图像斑点会退化。因此,本文提出了一种基于强度加权的质心算法来确定点的统计质心。以下公式用于计算图像质心:
,
其中xc和yc是图像质心的坐标,I是探测器子孔径上的光斑强度。
为了改进确定正确光斑位置的过程,采用了以下技术。该算法在每个子孔径区域中找到最亮的光点。在我们的代码中,通过扫描子孔径区域、应用Matlab内置的findpeaks函数[16]并比较该区域中的值来找到该子孔径中最亮峰值的位置来实现。为了减轻噪声背景的影响,对findpeaks函数应用了一个特定于竣工系统的阈值。一旦检测到峰值位置,就会选择峰值位置周围的某个区域,并在此感兴趣的区域应用加权中心化算法(等式(1)。利用这一位置信息,计算表明局部波前斜率变化的微分点运动。
在这项工作中使用的中心化方法是通用的,但足以满足我们的应用。现有文献中的许多技术都可以应用到数据处理管道中,从而进一步提高传感器的性能。同时,第2.3节中描述的数据重建过程是一种新的方法,可以在许多情况下改善或增强波前重建过程。
2.3模态波前重建
一旦获得局部斜率数据(即x和y斜率分布),就可以对其进行整合,重建波前。测量的边坡数据通过基于新开发的梯度多项式[17]的模态重建算法进行处理,称为G矢量多项式集。这些多项式由二维切比雪夫多项式的梯度得到,如等式(2)所示。标量多项式集和矢量多项式集在矩形孔径上都是正交的,这与A-SHWFS检测器的格式最匹配。
如式(3)所示,标量(f)多项式集是由第一类二维切比雪夫多项式构成的二维切比雪夫基集。
,
其中,
其中,
对于式(2)和式(3),G矢量是梯度多项式,F是标量多项式,Tm和Tn是用于构造标量基的一维切比雪夫多项式集。双索引变量n和m与多项式的阶数[17]有关,而i和j是表示笛卡尔坐标系轴的单位向量。图3显示了前三个非平凡G矢量多项式的抖动图。
图3.规范化矩形域中三个低阶G矢量多项式的振动图
这种基于模态矢量的方法的优点是将数据拟合到测量(即斜率)域中,并直接获得梯度多项式系数。这些系数用于获得标量多项式的系数,然后可与标量多项式基集一起使用,以获得重构波前。标量和向量多项式系数具有一对一关系。这种重建方法的一个有吸引力的特点是,它可以很容易地处理不同类型的非均匀采样。如第2.1节所述,并以第4.2节中的示例进行扩展,A-SHWFS可以积极有效地改变波前的采样分布。这里使用的模态重建方法可以有效地处理所有这些情况和采样的其他变化[18]。
G矢量多项式模态集允许高效和准确地生成多达数万个多项式项,对标量和向量多项式基集都采用递归关系。该方法在波前斜率急剧变化或孔径在一定区域被遮挡时,比传统的分区和模态方法误差小。对于模拟和真实数据的表面重建,本文报告了该模式方法与传统的Southwell分区方法的几个比较实例[17]。还包括与Zernike梯度多项式拟合的比较[17]。从这些例子中可以看出,与各种情况下的带状或泽尼克梯度多项式方法相比,G矢量多项式表现得更好(例如,在精确度方面)。作为比较参考,Neal等人[19]详细介绍了传统SHWFS的数据拟合和重建方法,以及对SHWFS精度和准确性的深入调查结果。
3.A-SHWFS系统原型
为了验证A-SHWFS系统的概念并定量研究其不同方面,利用现成的LCD面板设计和构建了一个原型。该系统还包括定制组件的组合,如菱形转透镜阵列。
3.1总体系统布局和配置
来自激光源的光通过一个空间滤光片,用一个透镜来准直光束,从而设置参考波前。然后,将光从三个六角形分段平面镜系统反射出去,用于引入和控制系统的波前像差。如第4.1节所述,当第三个后视镜的倾斜执行器为电动时,三个后视镜中的两个保持静止。移动后视镜上安装有一个精密执行器。这面镜子提供了波前的一部分,它产生了一个大的、局部的(相对于三面镜子反射的整个光束)倾斜度,将用于演示传感器的自适应采样能力。另外两个反射镜都保持静止,它们一起提供了不会改变的波前截面,因此与这两个反射镜反射的光相对应的检测区域在取样时不会显示出任何变化。执行器允许后视镜向特定方向移动。通过将其连接到执行器控制器,我们可以通过电子方式控制执行器的移动量,从而实现后视镜的可靠和精确运动(在这种情况下,它允许后视镜倾斜)。准直透镜起到系统停止的作用,因此撞击探测器的光束直径约为50.8mm。光束会漫过探测器,确保有足够的光线填充探测器,即使六边形的镜子倾斜得很厉害。为了对局部变化的大幅度波前进行表征和检测,对分段镜结构进行了专门的设计和构建,这是A-SHWFS技术的关键目标情况。图4是原型设置,表1总结了所有重要系统组件的规范,以提供对所述系统性能的追溯能力。
图4.概念验证实验的A-SHWFS原型配置。绿色箭头表示通过设置的激光波前传播方向
基本上,A-SHWFS是利用从参考状态测得的波前的相对变化来工作的。为了获得参考状态,可以使用已知的波前输入(如准直光束)校准传感器。与典型的SHWFS不同,A-SHWFS可以容纳较大的波前偏差,因此参考波前甚至可以是功率波。在我们的例子中,参考(或校准)波前是一个平行的平面波,根据该参考波前的测量记录初始点。这有助于解释LCD引入的剩余空间误差。在实践中,应首先使用目标(或参考)波前和记录的参考点位置校准A-SHWFS。然后,传感器报告波前偏差校准参考波前,作为一个斜坡测量。
表1.A-SHWFS原型系统的关键部件
|
部件 |
规范 |
模型信息 |
|
激光光源 |
二极管泵浦固体激光器,波长523nm |
Mimo UM-710 |
|
准直透镜 |
焦距:200mm,直径:50.8mm |
|
|
液晶面板 |
分辨率:800times;480,屏幕尺寸:152.5times;91.3mm, 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[20859],资料为PDF文档或Word文档,PDF文档可免费转换为Word |

