英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
功能性电刺激的非线性模型预测控制
摘要:最小化电刺激的量可以潜在地减轻肌肉的不利影响功能性电刺激(FES)引起的肢体运动期间的疲劳。基于渐变投影模型预测控制器被提出用于通过FES引发的膝延伸的最优控制。 一个控制Lyapunov函数被用作确保模型预测控制稳定性的终端成本。控制器验证结果表明该算法可以在稳定状态下实时实施RMS误差小于2°。实验还表明,控制器遵循步骤变化期望的角度并且对外部干扰稳健。
1.介绍
上运动神经元疾病或病症损害个体的执行功能动作的能力,例如站立,走路和抓握。功能电器刺激(FES)是低电平电流的应用到神经支配肌肉引起功能性肢体运动。 FES有可能恢复个体的肢体运动伴有皮质脊髓损伤。例如,通过刺激以适当的顺序方式进行特定的肌肉群可以实现步行运动。大多数FES设备,例如Parastep系统使用电极放置在皮肤表面(经皮电极)上使截瘫实现站立和行走。但是,这个导致肌肉比正常情况下更快地疲劳。关于肌肉如何有两种理论纤维由于FES的应用而招募,并且为什么会引起快速肌肉疲劳。第一个理论是肌纤维以Henneman的大小原则的相反方式招募,换句话说FES引起了收缩招募更大的运动单位,然后是较小的运动单位。第二个理论是FES本质上是新兵肌纤维以重复和非选择性方式,这意味着不像意志收缩根据FES的规模原则招募没有控制招聘的电机单元。不管这些理论中的哪一个是正确的,显而易见的是迅速肌肉疲劳的发作极大地限制了基于FES的持续时间设备可以使用。基于错误的FES反馈控制可以进行补偿对于较低的力量产生,由于肌肉疲劳,增加电刺激的幅度或频率。然而,增加刺激的幅度或频率可以进一步加剧肌肉疲劳发生的速度。
最近在混合动力步行矫形器,或使用矫形器或外骨骼总体上可以减少刺激因为矫形器可用于分享或减少FES的工作周期在行走时刺激某些肌肉。然而,刺激在不使用矫形器时肌肉或在共享控制之间仍然是一个重大问题。可以使用最佳控制技术产生所需的最小量的刺激创造理想的肢体运动,从而减少肌肉疲劳。在Stein,Lebiedowska和Sharma等人肌肉骨骼步态模型的优化被用来计算所需刺激的最小量产生步态运动。计算出的刺激模式可以应用于开环控制以再现所需的步态。但是,开环最优控制技术并不健壮由于缺乏反馈而导致干扰或建模错误。在王,Wang, Sharma, Johnson, Gregory和Dixon一个PD控制器与自适应逆最优控制器被用来通过FES控制膝盖伸展。这种强大的技术结合了基于误差的神经网络反馈控制这补偿了肌肉骨骼模型中的不确定性。但是,这种技术并没有解决最佳控制问题的先验成本函数。
与逆向最优控制不同,模型预测控制(MPC)可以在给定先验成本的情况下解决最优控制问题功能。另外,与开环最优控制技术MPC不同使用反馈,使其对干扰更加健壮。一个最佳的基于控制的控制器在运行时处于打开状态因为控制输入是针对无限范围计算的。MPC使用数学方法一个系统的模型来预测它将如何表现超过有限时间范围。然后通过最小化用户定义的成本函数,数值计算有限时间范围内的控制信号。系统的当前状态是在每个离散状态下测量的MPC用作初始条件的控制的时间步长下一个地平线。这些初始条件也作为反馈控制。但是,只有计算出的最优的第一个元素控制序列在系统上执行。下一个迭代测量状态更新,预测范围为向前移动了一个时间步,并重复该过程。
MPC已被提议用于FES的辅助控制站在Esfanjani和Towhidkhah,并放弃脚在Benoussaad,Mourad,Mombaur,Katja和AzevedoCoste进行纠正。在Esfanjani和Towhidkhah模拟了MPC在下肢肌肉骨骼模型上躯干来追踪减少关节扭矩和抖动的轨迹,使模型能够进行从坐到站的转移。MPC用于模拟肌肉骨骼模型来计算对胫骨前肌的刺激最大限度地减少脚的刺激和离地间隙步。肌肉骨骼系统的非线性动力学对FES的时变肌肉反应使MPC成为肌肉骨骼系统有挑战性在穆罕默德,Poignet,Fraisse和GuiraudMPC与投入产出反馈相结合线性化控制器和膝部伸展的FES控制仿真。输入输出反馈线性化控制器为用于消除肌肉骨骼的非线性动力学系统,从而使最优控制问题更简单解决。 MPC然后被用来控制线性化系统的非线性系统,这导致计算时间更少在模拟中超过20毫秒。可能实时应用FES的MPC控制频率不超过50 Hz。但是,它的实验验证还有待观察。
在本文中,一个非线性MPC(NMPC)算法可以控制FES驱动的非线性肌肉骨骼系统。本文只提供初步的一位参与者的结果。采用了梯度投影法以解决最优控制问题,其具有足够快的速度计算时间来促进NMPC的实时实现。这个也呈现肌肉活化的肌肉骨骼模型动力学和估计具体科目的程序,可用于实现的模型的参数用于膝关节伸展的FES的NMPC。模拟和实验从3个健全人士获得的结果表明,NMPC方法可用于通过FES控制膝关节伸展大约2°的稳态RMS误差。 NMPC算法也被证明是强有力的冲动扰动期间膝关节调节实验。因为NMPC是最佳控制技术可能会减少所需的刺激量产生期望的运动,从而减少FES诱导的肌肉疲劳。所提出的NMPC方法可能通过增加步行来使基于FES的步态恢复设备受益持续时间。
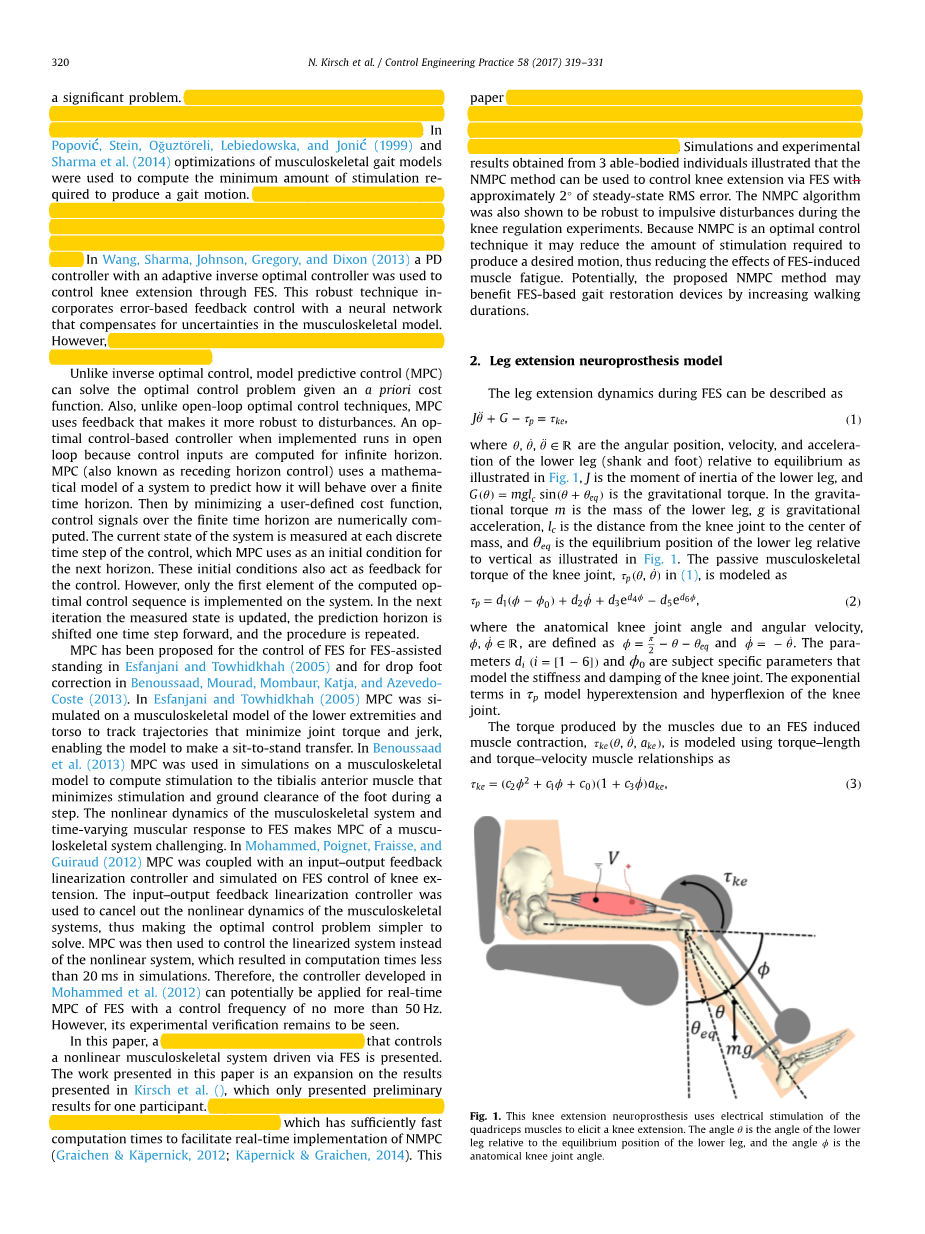
2.腿部伸展神经假体模型
FES期间的腿部伸展动态可以被描述为
(1)
其中分别是角位置,角速度和角加速度。如图1所示,J是小腿的惯性矩,而
是引力矩。在引力中扭矩m是小腿的质量,g是重力加速度,是从膝关节到中心的距离质量,并且是小腿相对的平衡位置垂直如图1所示。被动肌肉骨骼
(1)中的膝关节扭矩被建模为
(2)
其中解剖膝关节角度和角速度,定义为和。 参数和是特定的参数。
由FES引起的肌肉产生的扭矩肌肉收缩,用扭矩长度建模和扭矩 - 速度肌肉关系如
(3)
图 1
其中是特定的参数。 消极和主动膝关节扭矩基于希尔型肌肉等人的模型。肌肉激活,,可以被建模为一阶系统
(4)
其中是标准化的电刺激幅度而是肌肉激活的时间常数。该标准化的电刺激幅度可以被映射到电刺激的电流幅度
(5)
是产生所需的最小电流幅度运动和是最小电流幅度产生最大肌力。
为了实现NMPC算法,(1)和(4)在状态空间表达式中表示为
(6)
其中可以是由(3)确定并且关系。
3.参数估计
为了实现MPC,需要对(6)中的特定参数进行估计。 本部分描述的程序是基于Stein等人的方法。 参数的每个部分的结果估计程序将显示参与者1的例证程序的每一步。 三名身体健康的人参加了会议在研究中。每位参与者都被指示保持放松并且不会影响任何意志收缩的测量在实验过程中。为了实验一个双极,使用脉冲宽度为400mu;s的35Hz脉冲串。五对参与者进行了程序以确定他们的身份模型参数。程序的执行顺序很重要,因为一些程序依赖于从其他程序估计的参数。
测试1:饱和和阈值电流振幅(和它在(5))被估计。参与者坐在等轴测图中收缩配置,2秒长的脉冲串刺激如图2所示,使用称重传感器测量关节扭矩。测量刺激电流幅度2秒长的脉冲串从20mA缓慢增加到80mA,脉冲列之间有2秒。只有20个不同的电流振幅均匀分布在20至80 mA之间,脉冲长度为2 s使用火车而不是连续的电流斜坡,肌肉不会不必要地疲劳。峰值电流幅度被设置为80毫安,因为参与者发现电流高于该水平的幅度会令人不舒服。门槛当前的电流幅度()被当作电流产生第一次显着肌肉收缩的幅度。当前幅度的增加不再产生重要的影响认为扭矩的增加超过了饱和极限。因此,电流脉冲的幅度是产生扭矩的最后一个重大变化是饱和当前的个人振幅()。扭矩测量用图3中的电流振幅随时间绘制。根据这些数据,阈值被确定为23.2毫安(第二电流脉冲),饱和度被确定为76.8毫安(倒数第二个电流脉冲)。这些值是为每个主题自动确定。门槛是计算为产生负载单元的刺激幅度测量值比称重传感器的方差大三倍,饱和度是第一个刺激幅度产生的扭矩大于最大扭矩的99%被测量。
图 2
图 3
测试2:被动刚度参数(对于i = [1,3,4,5,6]和(2)中的)和质量参数((1)中的m和)通过将参与者的腿保持在不同的关节位置来确定用称重传感器测量被动膝关节扭矩在该位置。 因为没有刺激在这个过程中使用,因为腿是静止的对应于扭矩长度/速度的参数,肌肉激活,惯性和肌肉阻尼可能被忽略。 非线性,使用最小二乘曲线拟合算法来确定导致测量数据之间最佳匹配的参数以及被动膝关节扭矩tau;p的作用。 测量的数据最终的拟合由非线性最小二乘法确定曲线拟合算法如图4所示。
图 4
测试3:扭矩角参数(对于(3)中的)和激活时间常数((4)中的)由等轴测定收缩数据,同时刺激饱和水平(由测试1确定)在许多不同的关节处持续2秒。因为在测试期间腿部是静止的参数对应于转矩 - 速度,惯性和肌肉阻尼可能被忽略。 此外,通过刺激肌肉2秒并使用测量的最大扭矩作为最大等距收缩肌肉的激活动态可以忽略不计。像测试2一样,非线性最小二乘曲线拟合算法是用于确定导致最佳的扭矩角参数在不同的测量扭矩和关节角度之间进行拟合位置。 测量等长收缩力矩为七个不同的关节位置和最适合测量的位置数据如图5所示。
图 5
其中一个等长收缩测试被用来确定肌肉激活时间常数与第一次最匹配由称重传感器测量的顺序时间响应。 肌肉是在饱和水平刺激,这对应于归一化刺激1,并使用测量关节扭矩称重传感器。 在这些条件下,归一化的称重传感器测量是肌肉激活的一个很好的近似值
因为它被认为是肌肉激活等于标准化关节力矩。 标准化的称重传感器数据来自等距收缩如图6所示,其中刺激从1秒开始。(4)中一阶响应的肌肉激活时间常数最符合测量数据
0.18秒。
图 6
测试4:系统的阻尼和惯性参数((2)中的和(1)中的J)通过摆测试来确定。这是通过将腿放在大约完整的延长线上完成,然后释放它并允许它下降。腿中的光学编码器如图1所示,在膝关节处使用延伸机器测量腿下降时的衰减振荡响应。因为在此过程参数中没有使用刺激对应于扭矩长度/速度和肌肉激活可能会被忽略。然后使用优化来确定导致模型的阻尼和惯性参数最适合测量的数据。测量的编码器数据来自显示摆测试和最佳拟合模型的响应如图7所示。测量数据之间存在一些差异并且由于先前的参数如何而发生适合在测试2中确定,在估计期间保持不变,影响钟摆测试的动态。因此,重要的是要注意确定参数中的错误测试2可能会导致在估计参数时出现错误测试。
图 7
测试5:应用8 s的正弦刺激参与者的股四头肌以引出一个使用编码器测量运动和膝关节角度。刺激的幅度可以使得对于每个参与者的关节角度大于10°,但小于70°。这确保了肌肉总是处于紧张状态足够远离过度伸展/超屈曲。参数在测试1-4中估计,被用来填充模型膝关节伸展,然后进行优化识别使之成立的力 - 速度参数((3)中的)模型最符合测量数据。图8比较了测量结果膝关节角度到膝关节角度的模型时给出相同的输入。模型的输出与测量关节角度,RMS误差为3.15°,说明该模型和估计的参数是紧密匹配的实际的系统。参数估计过程中的错误可能是由未建模的肌肉骨骼动力学引起的。三个参与者的参数估计结果如表1所示。表1中的参数是主题具体的,并且可以根据刺激训练而变化用过的。由推/拉导致的拟合的RMS误差,等长收缩,肌肉活动,摆锤和正弦曲线输入测试在表1中给出。
图 8
表 1
4.梯度投影模型预测控制
NMPC算法被用来实现更高的精度控制,因为FES腿伸展系统是非线性的。 因为系统动态是连续可微的,是一个渐变可以使用投影算法。 这将提供足够的快速的计算时间,以便实时执行MPC(Graichen&Kauml;pernick,2012;Kauml;pernick&Graichen,2014)。梯度投影MPC或GRAMPC(Kauml;pernick&Graichen,2014,2015)使用哈密顿量和投影的梯度功能来解决最优控制问题。 梯度投影算法也使用提前终止条件来确保该算法可以实时实施。 这个部分将定义最优控制问题并给出一个简要说明已用于的渐变投影算法的总结解决最优控制问题。
最佳控制问题表述如下
(7)
服从:,,,其中是每次状态的初始条件, 是初始地平线时间地平线,T是地平线的最后时间。
设积分成本函数和终端成本,(7)中的定义为二次函数
(8)
其中是期望的状态。
Pontryagin的最小原则规定,如果最小化哈密顿量,则解决最优控制问题,其中哈密尔顿被定义为
(9)
因此,该梯度哈密尔顿算子可以用来迭代求解最优控制轨迹。 在迭代解决过程中,梯度投影算法使用定义的投影函数
(10)
一些MPC算法在定义中使用终端约束的最优控制问题来确保MPC的稳定性。 但是,而不是使用终端约束稳定MPC控制Lyapunov函数可以用作终端成本,以保证系统的稳定性。 对于腿部延伸给出了本文给出的神经假体系统的期望关节角度和的其余元素可以解决从(6)可得。控制Lyapunov条件为通过求解代数Riccati近似满足方程
(11)
对于增益矩阵P,矩阵A和B是矩阵的线性化状态空间系统,可以使用它来计算关于期望的状态和控制信号的雅可比线性化
(12)
其中
(13)
(14)
(15)
5.结果
梯度投影算法NMPC在模拟中进行了测试并在三名身体健全的男性参与者的实验中年龄在25-28岁之间,参加者坐着一个伸腿机器,远离电脑屏幕他们看不到
全文共10872字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14077],资料为PDF文档或Word文档,PDF文档可免费转换为Word

