英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于Hough域受限搜索空间估计和利用的车道检测
摘要
车道检测是辅助驾驶系统的关键技术之一。本文提出了一种基于Hough域受限搜索空间的鲁棒车道检测算法。虽然不需要限制搜索空间,但许多算法对某些参数(即期望消失点(Vp)的位置和Vp在水平和垂直垂直方向上的最大偏差、期望道路宽度(像素)和宽度上的最大偏差)施加一定的限制,以消除一些不太可能的检测结果,并删减一些错误检测以获得更准确的结果。然而,传统上,这些参数是手动选择并作为输入给算法的,相同的参数不能用于不同的实验装置。在这个算法中,我们提出了另一种方法来自动化这个过程。这篇论文的新颖之处有两个方面。首先,该算法在给定的实验环境下使用一组道路图像,统计估计期望位置和期望偏差,以及道路宽度。其次,在Hough域中创建一个遮罩,有效地对道路宽度和Vp位置施加必要的限制。虽然这种方法适用于任何实验装置拍摄的任何视频序列,但它也有利于限制搜索空间以实现更精确的检测结果。该算法对1000幅公路图像进行了测试,只有28幅道路标线漏检。显示检出率达97%以上。
1介绍
先进的驾驶辅助系统(ADAS)既可以防止车祸,也至少可以将后果降到最低。其中,这些系统包括自适应巡航控制、防撞系统、驾驶员睡意检测、盲点监控、车道偏离警告系统等。车道检测是车道偏离警告系统的关键要素,其中一些系统还集成了McCall和Trivedi(2004)、障碍物检测和车道检测以获得更准确的结果。
一个完整的系统一般可以分为四个主要部分块:特征提取,车道建模、优化和跟踪。本文提出了一种无任何跟踪的车道检测算法,其中对于车道跟踪Kalman滤波,常用的算法为Ozgunalp和Dahnoun(2014)和Wang等人(2012)的粒子滤波。
现有的车道特征提取算法有很多,包括Wang等人(2004)的边缘检测算法、Aubert等人(1990)的top-hat滤波器、McCall and Trivedi(2004)的可控滤波器、Burrow等人(2003)的全局阈值、Broggi等人(2010)的局部阈值和Veit等人(2008)的对称性阈值(SLT)。由于SLT具有精度高、计算复杂度低等优点,本文采用了SLT算法。
文献中有各种车道模型,包括线性、抛物线、线性抛物线、回旋线和样条曲线。更灵活的模型(如样条曲线)可以更精确地定义车道。然而,根据所使用的优化算法,这些模型对噪声非常敏感。此外,由于参数数目较多,估计这些模型的计算复杂度可能较高。另一方面,柔性较小的模型适用于曲率较小的车道。例如,Schreiber 等人(2005)的线性车道模型通常用于检测高速道路中的车道。或者,线性车道模型可用于检测车道,并基于初始检测,估计更灵活的感兴趣区域(ROI)模型。例如,在我们之前的论文Ozgunalp和Dahnoun(2015)中,首先使用线性车道模型检测车道,并为每个车道创建一个ROI(一个用于左车道,一个用于右车道)。然后,在ROI范围内,采用线性回归方法将抛物线车道模型拟合到特征点上。本文采用了一种有效的线性车道模型。
为了优化,采用Hough变换检测图像中的直线。尽管结合Hough变换使用了一种鲁棒的车道特征提取方法,但车道检测在某些情况下仍然具有挑战性。由于道路上存在阴影、伪影、车道被遮挡以及车道标线未得到很好的维护,车道检测是一项具有挑战性的任务。为了提高车道检测率,该算法可以采用Hough变换对一定角度范围的限制、Vp位置的限制或车道位置的限制。这些限制通常是手动选择的。该文利用一组图像进行无约束车道检测,并用统计方法估计最优限值,以减少误检。一旦计算出这些值,就会在Hough域中创建一个掩码,用于搜索具有所需参数的车道。需要注意的是,在Hough域中应用掩模不同于在图像域中应用掩模。然而,在图像域中应用掩模仅对图像中的特征点进行位置滤波,而在Hough域中应用掩模则限制了基于其模型参数的车道检测。
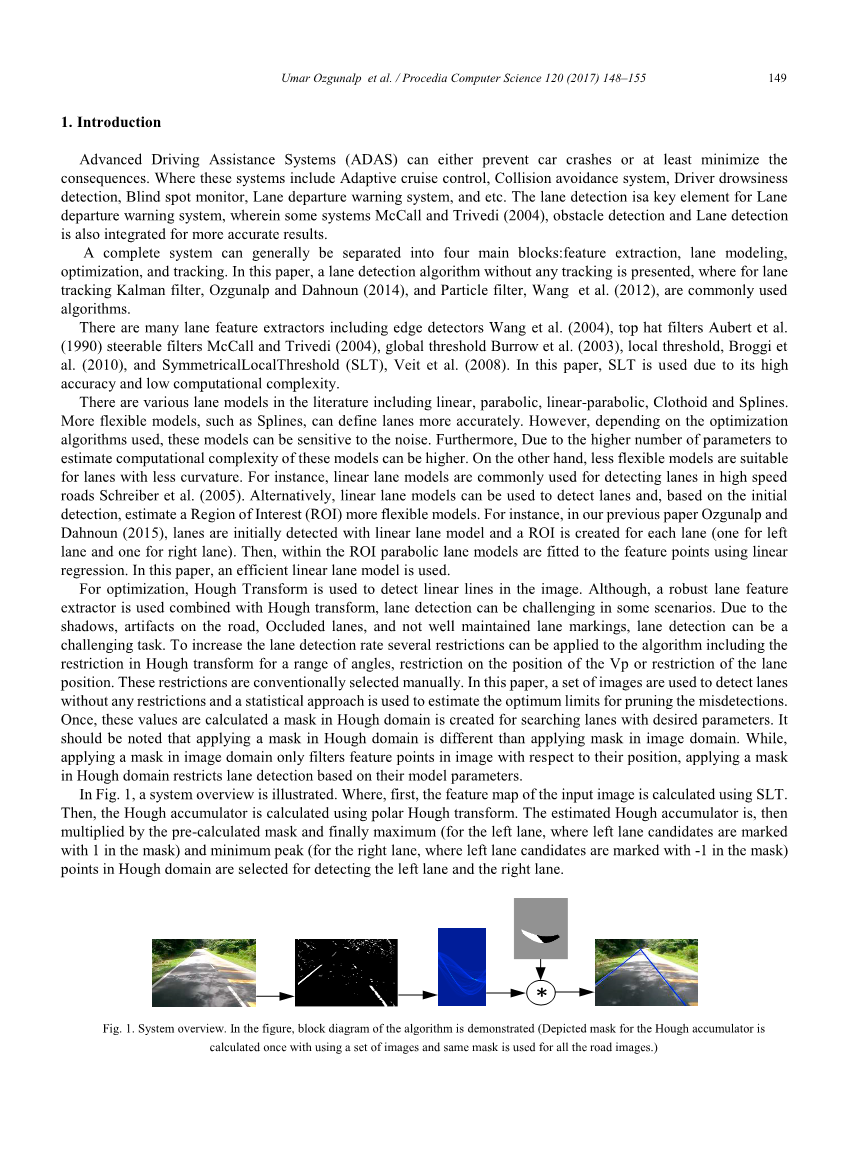
在图1中,示出了系统概述。其中,首先,使用SLT计算输入图像的特征映射。然后,利用极坐标Hough变换计算Hough累加器。然后将估计的Hough累加器乘以预先计算的掩码,最后乘以最大值(对于左车道,左车道候选标记为掩码中为1)和最小峰值(对于右车道,左车道候选在掩码中标记为-1),选择Hough域中的点来检测左车道和右车道。
图1:系统概述。在图中,展示了算法的框图(Hough累加器所描绘的遮罩使用一组图像计算一次,并且对所有道路图像使用相同的遮罩。)
2特征图估计
同时,该方法可用于任何车道特征图,本文采用SLT方法。该算法最大的缺点是只能检测到暗-光-暗(DLD)变换(车道是深色背景上的光画),而不提供车道特征的方向信息。
(a) (b) (c)
图2:(a) 输入图像;(b)灰度图像;(c)特征图(SLT)
该算法首先利用输入的RGB图像计算灰度图像。这是通过平均每个像素的红色、绿色和蓝色通道中的值来实现的。这个过程如式1所示。
?? = (?? ?? ??) (1)
其中,对于像素?,??表示灰度图像的计算像素强度值,??表示红色通道值,??表示绿色通道值,并且??表示输入图像的蓝色通道值。SLT独立地处理灰度图像的每一行。
该算法检查图像域中的每个像素。如果像素值减去阈值(Th)大于范围内左侧像素的像素强度的平均值(AverageL)和范围内右侧像素的像素强度的平均值(AverageR),则将像素分割为特征点。该算法在伪代码1中得到了演示。
在图2中,示出了使用SLT的估计特征图。图2(a)是输入图像,图2(b)是灰度图像,图2(c)是SLT算法估计的特征图。
3.Hough 变换
Duda和Hart(1972)的Hough变换(HT)是一种全局优化算法,用于检测线性线、抛物线、圆或任何数学定义的模型。然而,该算法的计算复杂度随着参数个数的增加呈指数增长。因此,最常用的HT用于检测只有两个参数的线性线。
在应用HT之前,SLT的输出被反馈给距离变换,以便能够检测车道的中心而不是对角线。HT首先用theta;(?)和rho;(?)的轴创建一个2D累加器。对于每个像素和theta;范围(,即分辨率可以是),HT计算一个??值并使用以下等式(在该算法中,使用特征映射梯度的值)递增累加器中具有给定?和计算的?值的单元。
?lowast;?os(?) ? lowast;sin(?) = ? (2)
(a) (b) (c)
图3:(a) 输入特征地图;(b)左车道特征地图;(c)右车道特征地图
本文的目标是从图像中提取车道线。因此,如图3(a)所示计算第一二值图像。需要检测一条左车道和一条右车道。如图3(b)所示,为了检测左车道,图像的右侧被遮罩。然后,在Hough累加器中搜索一条投票数最大的直线。如果累加器中的最大投票数不超过图像的对角线大小除以20,则假定该侧道路中没有绘制的车道。如图3(c)所示,为了检测右车道,图像的左侧被遮罩。类似地,右车道将搜索投票数最大的一条线。图3(b)的HT示于图4(a),图3(c)的HT示于图4(b)。
(a) (b)
图4:(a) 二值道路图像的HT,其中图像的右侧被遮罩以检测左侧车道;(b)二值道路图像的HT,其中图像的左侧被遮罩以检测右侧车道
4消失点估计
将消失点估计为左车道和右车道的交点。极性Hough变换所使用的线方程可以表示为等式2。然后,左车道和右车道的直线可以用矩阵形式表示,如等式3所示。
其中,??是左车道的theta;,??是左车道的?,??是右车道的theta;,??是右车道的?,Vp?是消失点的垂直位置,Vp?是消失点的水平位置。重新排列等式4作为 指向 ?p。
5. 车道检测中受限搜索空间的估计
该算法首先利用SLT和polar-HT相结合的方法估计车道,对一组道路图像(实验中使用了2993幅道路图像)进行车道检测。利用这组图像的已知线参数,计算出Vp?的中值、Vp?的中值、Vp?的标准差、道路宽度的中值、道路中心的中值。基于这些估计,计算左车道和右车道的ROI,如图5所示。候选左车道应与Vp的估计范围(图5中的绿线)和横向偏移的预期位置(图5中所示图像底部的红线)相交。类似地,候选右车道应与Vp的估计范围(图5中的绿线)和横向偏移的预期位置(图5中所示的图像底部的蓝线)相交。
这种限制不能通过掩蔽特征映射来实现。虽然遮罩特征地图消除了一些不需要的特征点,但它对车道线参数没有限制。因此,这是在Hough域中实现的,这将在下一节中描述。仅通过移除地平线/Vp?上方的任何特征点对特征点进行分割,因为该线上方不需要车道特征。
图5:使用左车道和右车道的一组图像自动估计ROI。
6为Hough变换创建遮罩
Hough累加器有两个参数?和?。其中,?的范围为-900lt;?lt; 900,且?的范围为(如前所述,Hough累加器中的单元表示图像域中参数为?和?的线。首先,创建一个空的(其单元格中的所有值都为零)Hough累加器。然后,对于具有已知?的Hough累加器中的每个单元(图像域中的线),检查和?是否与地平线上给定的Vpx范围相交(参见图5上的绿线)。如果发生相交,则该单元格是一条候选线并用一标记,否则将保留为零。结果,为Hough域创建掩模,其中仅标记与期望Vp范围相交的线,如图6(a)中所示。其次,左侧车道也应与图5底部所示的红线相交,右侧车道应与图5底部所示的蓝线相交。因此,创建另一个空Hough累加器,左车道候选标记为1,右车道候选标记为-1。因此,通过将该累加器与图6(a)所示的累加器相乘,获得图6(b)所示的累加器。其中,在图6(b)中,左车道候选标记为1,右车道候选标记为-1,并且不需要的线的值为0。这样,Hough累加器的遮罩仅使用一组图像获得的值创建一次,然后对每个图像使用相同的遮罩来限制车道线参数。
(a) (b)
图6.(a)仅标记与所需Vp范围相交的线的Hough域创建掩码(b)左车道候选标记为1,右车道候选标记为-1,不需要的线的值为0的创建掩码。
因此,对于道路图像,首先使用SLT创建特征地图,然后计算估计的特征地图的HT。然后将计算出的HT累加器乘以掩码。这意味着左车道候选数乘以1,右车道候选数乘以-1,其余行乘以0。因此,为了检测左侧车道,取最大值的单元,并且取最小值的单元来检测右侧车道。最后,如果图像上没有绘制的左车道或绘制的右车道,则使用图像的大小或对角线设置阈值(阈值=对角线大小/10)。
7实验结果、局限性和未来工作
实验结果表明,该算法具有较强的鲁棒性。然而,它有两个主要的局限性。首先,由于选择了特征提取器,它只能检测绘制的车道。SLT假设车道边界被绘制,并利用车道标志具有暗-光-暗特性的假设。但是,如果未绘制道路边界,则此假设无效。从图7可以看出这种情况(第4列,第1行和第2行)。此外,如果道路上有道路标线,该算法可能会失败。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[258220],资料为PDF文档或Word文档,PDF文档可免费转换为Word

