
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
使用目标位置的图像处理检测高速飞行物体
摘 要
在本文中,我们使用以高速测量移动物体的图像处理方法研究目标系统。 测量快速移动的物体是非常困难的。目前,中央电视台车厂已经利用了红外,超声和雷达的优势。特别是军事和体育射击还没有应用技术,他们真的需要测量高速物体的技术。我们使用红外摄像机检测物体的框架,并使用Canny 边缘,轮廓,校准,变换过程和阈值检查物体的实际坐标。在本研究的实验结果中,我们展示了目标系统的优越性;今后对军事和体育射击领域有用。
关键字 对象检测,目标系统,Canny边缘,轮廓,校准
1 介绍
检测高速移动的物体是研究等领域以及军队的重要未找到目录项。领域。使用什么尺寸的设备来检测物体运动的速度是非常重要的[1]。对于军事射击,应检测子弹飞行平均为5.56 mmtimes;22 mm 940 m / s。所以红外线,超声波,雷达,摄像头和各种目标系统都可以针对目标检测设备。配备多个传感器来测量来自实际目标的红外或超声波反射量,红外传感器,超声波传感器,难以选择不合理的观点。虽然目前的雷达受到很多关注,但仍处于研究阶段,检测小尺寸移动物体的首选方法难以遵守。另外与其他这样的设备相比太贵了。
实际拍摄通常在室内进行,但是从正常的室外拍摄也有进展。换句话说,因为考虑到安全隐患会对人造成伤害,是外界的考虑。在室外拍摄时,室内环境需要考虑很多事情。特别是阳光,雨,雪等很大程度上受到自然环境的影响;开发用于检测用户想要的物体的移动的目标系统是非常困难的。
在本文中,我们研究了将移动物体的实际位置坐标检测到室内可用速度以及户外环境的目标系统。白天和黑夜使用红外波长,无需编写研究对象,可以使用红外摄像机高速确定移动物体的实际坐标。该框架设有使用OpenCV图像的红外摄像机图像处理。另外,我们提出一种放置必要雕塑的方法,实际上可以通过目标系统中的图像处理精确测量位置坐标。
2 相关研究
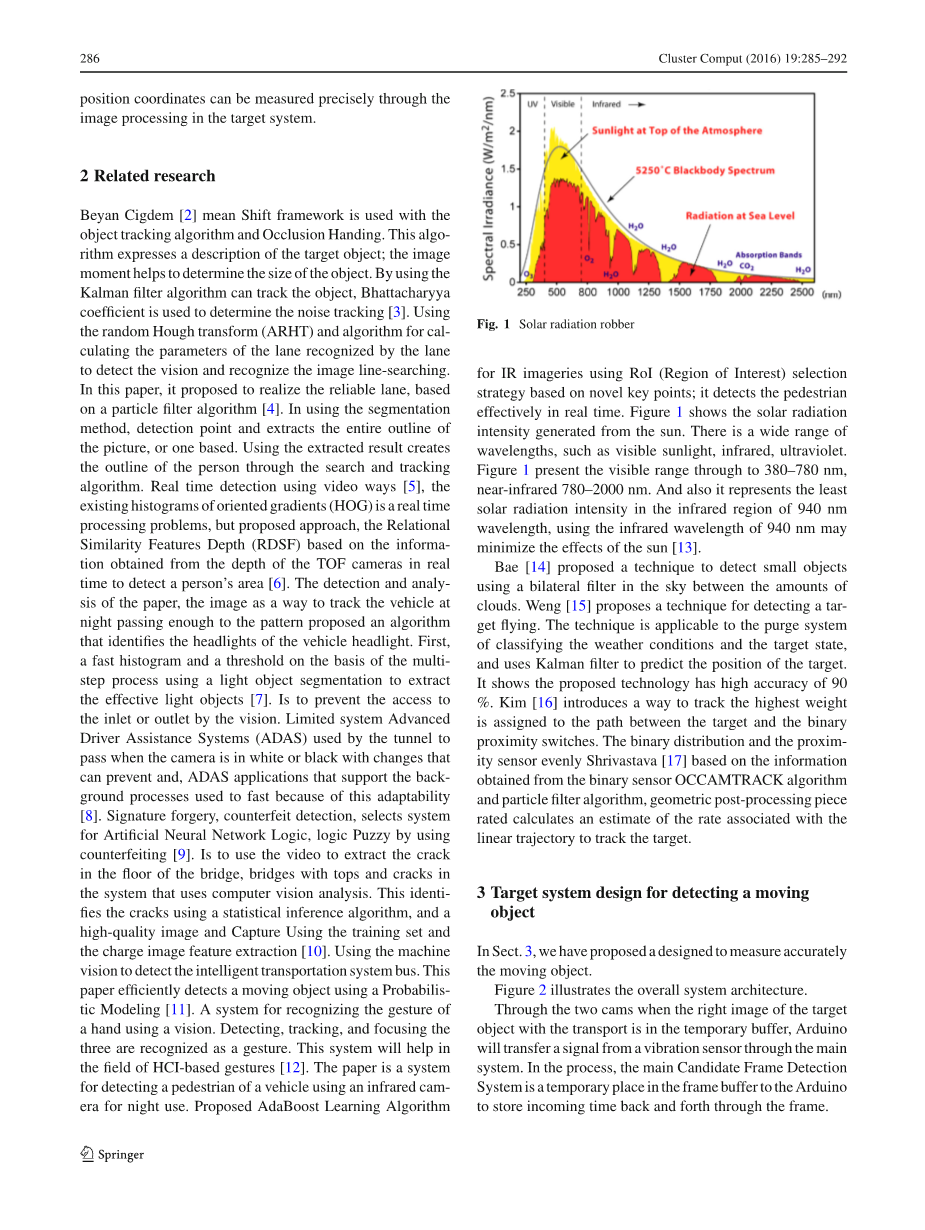
Beyan Cigdem [2]意味着转变框架与对象跟踪算法和遮挡处理一起使用。该算法表示目标对象的描述;图像时刻有助于确定对象的大小。通过使用卡尔曼滤波算法可以跟踪对象,Bhattacharyya系数用于确定噪声跟踪[3]。使用随机Hough变换(ARHT)和算法来计算车道识别的车道参数,以检测视觉并识别图像线搜索。在本文中,提出了基于粒子滤波算法实现可靠的车道[4]。在使用分割方法时,检测点提取图片的整个轮廓,或者基于一个。使用提取的结果通过搜索和跟踪算法创建人物的轮廓。使用视频方式的实时检测[5],现有的定向梯度直方图(HOG)是一个实时处理问题,但提出的方法是,根据从深度获得的信息中的关系相似特征深度(RDSF)TOF相机实时检测一个人的区域[6]。纸张的检测和分析,图像作为跟踪车辆在夜间通过足够的模式提出了一种识别车头灯前灯的算法。首先,基于多步骤过程的快速直方图和阈值,使用光对象分割来提取有效的光对象[7]。是防止视力进入入口或出口。有限系统高级驾驶员辅助系统(ADAS)由隧道使用,当相机处于白色或黑色时,可以防止变化,并且支持后台处理的ADAS应用程序由于这种适应性而快速使用[8]。签名伪造,伪造检测,人工神经网络逻辑选择系统,使用伪造的逻辑模糊[9]。是使用视频来提取桥梁的地板上的裂缝,使用计算机视觉分析的系统中的顶部和裂缝的桥梁。这使用统计推理算法,高质量图像和捕获使用训练集和电荷图像特征提取来识别裂纹[10]。使用机器视觉来检测智能交通系统总线。本文使用概率模型[11]有效地检测了运动物体。用于使用视觉识别手的手势的系统。检测,跟踪和聚焦三者被认为是一种姿态。该系统将有助于在基于HCI的手势领域[12]。该纸是用于使用红外摄像机检测车辆行人的夜间系统。基于新的关键点,使用RoI(感兴趣区域)选择策略的IR图像的拟议AdaBoost学习算法;它实时有效地检测行人。图1显示了从太阳产生的太阳辐射强度。波长范围广,如可见光,红外线,紫外线。图1将可见光范围呈现为380-780nm,近红外780-2000nm。而且它也代表940nm波长的红外区域中最小的太阳辐射强度,使用940nm的红外波长可以最小化太阳的影响[13]。
图1 太阳辐射强盗
Bae [14]提出了一种技术,可以在云量之间的天空中使用双边滤光片来检测小物体。Weng[15]提出了一种检测目标飞行的技术。该技术适用于对天气条件和目标状态进行分类的清除系统,并使用卡尔曼滤波器预测目标位置。它表明所提出的技术具有90%的高精度。Kim[16]引入了一种跟踪最大权重分配给目标和二进制接近开关之间的路径的方法。二进制分布和近似传感器均匀地基于Shrivastava[17],基于从二进制传感器OCCAMTRACK算法和粒子滤波算法获得的信息,几何后处理片分数计算出与线性轨迹相关的速率的估计,以跟踪目标。
3 用于检测移动物体的目标系统设计
在教会 3,我们提出了一种精确测量移动物体的设计。
图2显示了整个系统架构。
图2 整体系统架构
通过两个凸轮,当目标对象与运输工具的正确图像位于临时缓冲区中时,Arduino将通过主系统传送来自振动传感器的信号。在此过程中,主要的候选帧检测系统是Arduino的帧缓冲区中的临时位置,用于通过帧存储传入时间。
然后,通过目标像素检测处理,通过差分图像检测被检测物体的帧。并且通过阈值图像处理来检测对象的像素,在被检测像素上绘制的矩形的中心点处获得Canny边缘为正方形,然后获得轮廓。
完成目标像素检测过程后,我们将首先通过摄像机设置进行环境校准,然后再确定实际的坐标。校准是将真实世界坐标中通过图像处理获得的像素值应用的过程。最后,通过具有真实坐标的变换来转换像素值。
3.1候选帧检测
图3示出了找到以帧数检测到的对象的图片帧。为了防止系统过载,该对象仍然存储在临时缓冲区中。如果物体在Target Board中向右移动,Arduino会向主系统发送信号。
图3 候选帧检测
3.2 目标像素检测
第3.1节是目标像素检测过程,一旦候选帧检测出现该过程。图4从对象检测到的帧中找到检测到的真实对象的像素。首先,帧检测计算提取的七帧的像素值的平均值以找到实际物体。然后逐帧检测严重物理对象的像素值差异。图像通常会产生大量的噪音。我们确定要与从其中给出阈值的值从检测到的帧大小找到对象的像素值的像素值的其他外部噪声区分开来的对象。
图4 目标像素检测
Canny边缘是通过改变边界来找到不同强度的两个区域之间的图像的边缘对比。等式(1)和(2)可以确定在边缘处表示二阶导数的光区域和暗区域的位置。公式(1)是二维函数f(x,y)的微分方程,离散数据f(x,y)近似表达式的差分表达式(2)。
(1)
(2)
因此,Canny边缘路线处于由矩形包围的像素的X,Y的保存的最小值和最大值。最后,轮廓获得与对象中心点相对应的像素的位置,以找到矩形的中心点。
3.3 确认实际坐标
确认实际坐标执行用于计算由与对象相对应的像素的位置确定的实际坐标的处理。
(3)
校准必须首先校准是图像处理中必需的步骤。我们用空间的眼睛三维地看着。当这次作为二维相机的图像被改变时,图像上的三维位置的点由拍摄时的相机的位置和位置确定。因此,当将三维点投影到图像上以获得位置并且将三维空间坐标从图像坐标恢复到要移除的站时,可以计算确切的内部因素。获得这些内部因素的FIRA仪表值的过程称为校准。在公式(3)中(X,Y,X)是3D点的坐标[R | t]是用于将真实世界坐标系的坐标系转换为相机的旋转/移动转换矩阵,A是相机矩阵。执行校准处理后的对象位置的像素值通过变换计算为实际坐标。
4 系统实现
4.1 系统结构
图5显示了硬件用于本研究的状态。1152个或更多的IR 850nm波长发光部分的部署是发射大量的红外IR CAM 2波段并观察目标板。2 LED控制器也用作红外发光部分以匹配恒定电流。如果您想要击中背面的目标板对象,请连接两个压电传感器以检测Arduino的影响。表1显示了每个硬件的类型和数量。
表1硬件类型和数量
|
类型 |
数量 |
|
红外摄像机(索尼眼镜) |
2 EA |
|
红外发射机850nm(KID05BW85) |
144 times; 8=1152 E |
|
LED控制器 |
2EA |
|
Arduino uno |
1EA |
|
压电传感器 |
2EA |
图5 系统安排
4.2校正确认实际坐标
图6是扭曲图像坐标和校准。图像变形具有相应的像素坐标,它计算默认使用的实际坐标。
图6 校准图像
4.3图像处理流程
第4.3节和图7显示了图像处理流程。CAM存储来自第一帧的帧以检测物理对象被检测到。接下来,Threshold标识通过差异获得的帧图像中的对象。识别部分由方形像素组成,Canny Edge通过该过程计算对象轮廓和选定等高线的中心。它显示中心像素值通过Transform计算为位置坐标。
图7 图像处理流程
5展开分析
在教会5我们为所提出的方法和居民总数的实验放置了目标板。
图8a示出了用实际枪的总表现的BB子弹的发射。我们从几个地方推出,以确保整个拍摄都准确地感应到了平板。(b)确认实际感测是否来自左摄像机和右摄像机。但是,检测屏幕上的误差mm,确保有精确的。(c)显示通过从一些BB子弹发射的图像处理实现的所得到的图像。
(a) (b)
(c)
表2显示了每次执行次数的错误范围。随着执行次数的增加,误差范围增加,但可以确定约20mm左右。
表2实验中的误差范围
|
执行次数 |
误差范围(mm) |
|
50次 |
大约22.3 |
|
100次 |
大约21.5 |
6 结 论
我们通过图像处理高速移动物体的坐标提出了一种用于检测实际位置的目标系统方法。通过使用没有可用的IR敏感的相机的白天和黑夜,将图像处理应用于Open CV。 此外,考虑到实际拍摄范围的环境,并对原型的结构进行了测试。本研究的实验结果显示误差率的精确测量发生在约20 mm的所需发射范围内,但如果目标系统的准确性得到保证,则可以在各个领域使用。
我们通过自动化增加校准精度,在人们以前直接提高性能的方式进行校准,考虑到太阳光的红外波长强区将研究如何解决噪声。预计还可以采取其他方式来提高targetPixel的头寸估算的准确性。
致 谢
本研究部分支持MSIP(科学技术部和信息通信技术与未来计划部)/ IITP(信息通信技术促进研究所)[12221-14-1001,下一代网络计算平台测试平台]的IT研发计划。 和华南国立大学,2013 - 2014年。
Changhee Cho 于2010年获得江南国立大学电子商务跨学科课程硕士学位。他从二零零零年至二零零一年至今在华南国立大学电子商务跨学科课程学习。 目前,他在西马公司担任首席执行官。 他的研究兴趣是电子商务,自动化系统,移动接口设备,云计算和陆军IT。
Jinsul Kim 于2001年获得美国犹他州盐湖城犹他大学计算机科学学士学位。和博士2005年至2008年,韩国大田科学技术研究所(KAIST)数字媒体工程系信息与通信系学士学位,曾任IPTV基础设施技术研究实验室,广播/电信研究所研究员从2005年至2008年,韩国大田电子与电信研究所(ETRI)融合研究部。他于2009年至2011年在韩国钦南担任韩国拿撒勒大学教授。目前,他是春南国立大学教授,光州,韩国他被IEEE Trans邀请了评审员。他是2008年以来的多媒体,他是IWICT2013 / 201
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[614083],资料为PDF文档或Word文档,PDF文档可免费转换为Word

