
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
下肢机器人外骨骼的现状和未来发展方向
摘要
在过去十年中,机器人外骨骼的研究迅速发展,机器人硬件和能源供应的进步为人类测试提供了可行的技术原型。本综述论文描述了当前的下肢机器人外骨骼,并对该领域的常见趋势进行了具体的研究。多数已发表的文献缺乏对外骨骼性能的严格定量评价,难以确定许多设备的劣势和缺点。我们分析了外骨骼设计中的常用方法,以及某些技术的收敛性或缺乏收敛性,主要专注于执行器、传感器、能源、材料和控制策略。在外骨骼研究中要克服的最大障碍之一是用户界面和控制,需要更加直观和灵活的用户界面,以提高机器人外骨骼的成功。在最后一节中,我们将讨论外骨骼控制中主要障碍的未来解决方案。许多新兴技术可以为现有和未来的外骨骼设计带来巨大的优势。最后,我们列出了新兴技术的优点和缺点,并讨论了该领域的未来可能。
关键词:步态,人体表现增强,矫形矫正器,康复治疗,可穿戴机器人。
1.简介
本综述的目标是总结下肢机器人外骨骼的最新技术状况,并讨论如何推动该领域的发展。因为在媒体或新闻稿中每月都在出现新设备,所以总结当前技术状态很困难。虽然对设备的评论将不可避免的过时,但对世界各地的研究团队正在进行的工作做评估仍有价值。我们希望为研究人员提供新的领域,因为他们在寻找机会在自己的工作中做出独特的贡献。
我们把机器人外骨骼到根据其用途分为三大类。第一类是人类性能增强外骨骼,用于增强体力、耐力和其他身体能力,这种类型的外骨骼可以用于起吊重物,长距离搬运重物,或用重型工具的工作,这些设备可以应用于仓库,建筑工地,紧急救援行动或军事基地和短途旅行中。第二大类包括针对残疾人的辅助装置:中风,脊髓损伤,肌肉无力以及其他神经系统或肌肉系统疾病可能导致步行困难或手臂运动障碍。目前的估计表明,仅在美国就有1170万步行困难的人和880万难以举起物体的人[1]。辅助机器人外骨骼可以让用户完成自己无法完成的动作,例如,有些外骨骼旨在让患有下肢麻痹的个体借助拐杖走路。第三大类是用于康复的治疗性外骨骼,这些设备可以帮助、抵抗或扰乱使用者的运动以达到治疗的目的。他们可以训练个人的肌肉和/或神经系统,以帮助他们在不使用外骨骼时克服残疾的限制。有一些可以同时辅助和治疗外骨骼的设备,这些双功能外骨骼最终可能有助于治疗,同时增强使用者在佩戴时的身体功能。
2. 现有技术状态
A. 设计和性能细节的限制
对机器人外骨骼现有技术状态的评估非常困难,原因有二: 技术发展的速度和科学出版物在该领域的可用性。这些问题将在综述的最后一部分得到更广泛的讨论,但他们应该在这里提及。当您阅读下一节关于正在开发的设备的章节时,我们将尝试着重说明在设备中所包含的各种技术,以及缺乏同行审阅的描述或测试设备的期刊文章。
B. 人类绩效增强指标
目前还没有评估用于人类性能提升的机器人外骨骼的黄金标准,最常见的指标是测量行走或跑步条件下有无外骨骼的运动代谢消耗。对于专注于帮助健康个体运动的设备,代谢成本显然是最普遍的标准。很少有研究表明,在使用外骨骼的过程中,运动过程中代谢成本有统计学意义的下降。随着设计、硬件和控制系统的改进,人们希望更多的机器人外骨骼能够实际上为用户提供步行和跑步的能量。对机器人外骨骼进行评估变得更加困难,因为它提供了帮助提升物体或使用工具进行工作的能力。能量学只是任务的一个方面,疲劳,生产力和安全对于这些外骨骼来说都是非常重要的要素。
另一种常用的外骨骼指标是肌电图(EMG)信号的分析,用户通过修改肌肉活动模式来响应外骨骼协助。量化EMG数据有助于了解外骨骼对用户生物力学的潜在影响。许多外骨骼的共同目标是在运动过程中减少下肢肌肉的收缩。这通常通过表面肌电图来测量,但也可以使用肌肉骨骼建模[2]和超声成像技术[3]。
C. 人性化增强设备
2000年,美国国防部高级研究计划局(DARPA)启动了一项关于机器人外骨骼的大型资助计划,帮助推动该领域向前迈进了一大步。人类性能增强的外骨骼(EHPA)的程序,专注于增强士兵的能力[4-6]。尽管最初资助了许多不同的研究小组和技术,但最明显的是两个外骨骼原型。伯克利下肢外骨骼(BLEEX)的目标是开发一种便携式机器人外骨骼,它可以让士兵在远距离携带重物[7-10],其设计的一个关键点是,设备的重量和背包的重量通过外骨骼框架进入地面,而不是在用户身上。BLEEX在髋关节、膝关节和踝关节的下肢都有启动关节。BLEEX装置的主要局限性在于它太重,关节范围内的运动和控制有限,尽管外骨骼重量和背包负载通过框架传递到地面,但该设备仍然存在相当大的质量,影响了用户的运动惯性。由于该控制器使用运动学和动力学传感器在运动过程中基本上避开使用者的四肢,所以在用户发起运动和外骨骼执行器作出反应之间总是有明显的滞后。由DARPA EHPA主要资助开发的第二个外骨骼原型是由史蒂芬·雅各布森创立的机器人公司Sarcos开发的。Sarcos被Raytheon收购后,Sarcos外骨骼[6],[11]演变成了XOS。Sarcos外骨骼是一种全身式的衣服,既可以支撑手臂又可以支撑腿部,以增强使用者的力量。外骨骼通过连接到系带电源的旋转液压执行器为其关节提供动力。由于原型机的高电能需求,它不是完全便携的。它是用力传感器控制的,这些力传感器在用户和外骨骼两者上进行测量,试图最小化用户和外骨骼之间的接触力量[11]。和大多数机器人外骨骼开发项目一样,Sarcos团队没有公开提供他们设计或其性能的细节,很少有定量结果可用于评估设备的成功。现在在雷声公司的持续发展下,一个新的版本出现了,据说比原来的设计更节能[12]。Herr提供了对DARPA外骨骼和其他在此期间开发的其他研究项目的大量的综述[13],[14]。
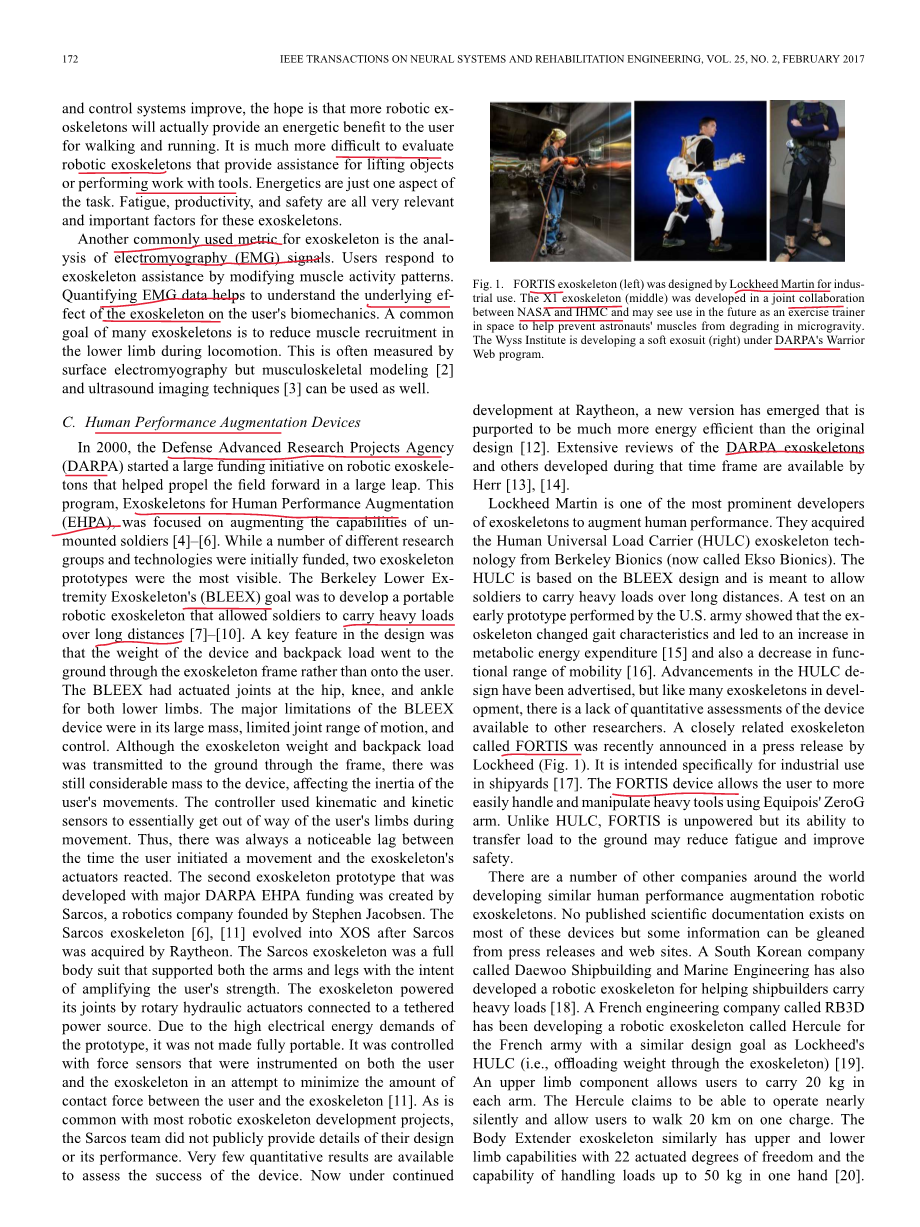
洛克希德·马丁公司是用于增强人类的性能的外骨骼最杰出的开发者之一,他们从伯克利仿生学公司(现称为Ekso仿生学公司)购买了人类通用载荷载体(HULC)外骨骼技术。HULC基于BLEEX设计,旨在让士兵可以长距离承受重负荷。美国陆军的早期样机测试表明,外骨骼改变了步态特征,并导致代谢能量消耗的增加[15]和功能范围的降低[16]。HULC设计的进步已经公布,但是像许多开发中的外骨骼一样,它缺少对其他研究人员可用的设备的定量评估。最近,洛克希德公司在一份新闻稿中宣布了一种与之密切相关的外骨骼,名为FORTIS(图1),它专门用于造船厂的工业用途[17],FORTIS设备允许用户使用Equipois的ZeroG手臂从而更轻松地处理和操作重型工具。与HULC不同的是,FORTIS没有动力,但它将负载转移到地面的能力可以减少疲劳,提高安全性。
世界上还有许多其他公司正在开发类似的人体表现增强机器人外骨骼,这些设备大多数都没有发表过科学文献,但是可以从新闻发布和网站上收集到一些信息。一家名为大宇造船和海洋工程的韩国公司也开发了一种机器人外骨骼,用于帮助造船工人搬运沉重的货物[18]。一家名为RB3D的法国工程公司正在为法国军队开发一种名为Hercule的机器人外骨骼,其设计目标与洛克希德的HULC类似(即,通过外骨骼卸载重量)[19]。上肢组件让使用者在每只手臂上能承重20公斤,并声称,Hercule能够静音运行,用户在一次充电后能行走20公里。Body Extender外骨骼同样具有上肢和下肢的能力,有22个动作自由度
图1. FORTIS外骨骼(左)由洛克希德马丁公司设计,用于工业用途。X1外骨骼(中)是美国航天局和IHMC联合开发的,可能会在未来用作太空运动训练器,以防止宇航员的肌肉在微重力作用下退化。Wyss研究所正在DARPA的Warrior Web项目下开发一款柔软的外套(右)。
X1外骨骼(图1)是由美国宇航局和位于美国佛罗里达彭萨克拉的人类与机器认知研究所共同研制的,它被认为是训练宇航员在太空中防止肌肉疲劳和骨骼变薄的一种潜在手段[21],[22],该装置可以配置成一种力控制模式,允许偏心和同心运动。
最近的一个创新设计来自于Conor Walsh和他在Wyss研究所的研究团队,他们已经开发了几种可为人体运动提供动力辅助的软可穿戴设备[23], [24].,这套设备(图1)与带有重金属框架和电机的典型刚性外骨骼不同。该项目由美国国防部高级研究计划局(DARPA)的“勇士网络计划”资助,正在朝着一个新的方向发展,然而,他们还不能证明使用该装置可以实质性的减少能量消耗。
大量的机器人踝外骨骼原型已经被开发[25] - [34],它们有时被称为动力踝足矫形器。这些机器人脚踝外骨骼的结果令人鼓舞,但并不具有绝对优势。例如,我们已经证明,身体强壮的人在行走时使用非便携式的机器人踝关节外骨骼([35]-[37])减少了肌电活动和代谢消耗。目前为数不多的来自麻省理工学院的穆尼和他的同事的研究表明,使用便携式外骨骼(图2)可以减少代谢成本(图2)[38],他们开发了一种轻型动力踝足矫形器,可以在延迟的姿势下提供足底的屈曲帮助,与没有使用外骨骼机器人的人相比,该设备能使使用者的代谢成本平均降低8%。另一种最近的踝关节外骨骼装置已经实现了在没有任何动力的情况下减少了代谢能量消耗[39]。使用离合器和弹簧的被动踝关节外骨骼比没有设备行走的代谢成本低7.2%(图2)。目前还没有商业化的机器人踝关节设备,一些外骨骼的设计是为了增强健美主体的跑步,并依赖于被动弹性机制。麻省理工学院的设计包括连接到大腿和小腿的外骨骼膝关节[40],离合器被用来在膝盖伸展时锁定膝盖以提供站立时的阻力,但是在摆动期间解锁以便自由移动。作者发现,使用该装置时,即使平行的弹簧提供了大约18%的生物和外骨骼硬度,也会增加25%的代谢。类似的结果也出现在密歇根跑步外骨骼机器人上[41],密歇根设计(图2)不同之处在于它在膝盖和脚踝处有多个弹性元件,但它也提供了与生物下肢平行的顺应性。密歇根外骨骼也一直连接到鞋上,将外部的弹簧负载传输到地面[42]。在运行外骨骼过程中的一些困难包括在跑步时肢体运动的速度比走路时快,而在步行期间需要较低的阻力。这意味着,运行外骨骼需要非常轻便,以便在支撑外骨骼摆动所需的额外工作无法抵消的姿势中给予支持。
图2.来自麻省理工学院Hugh Herr实验室的踝足外骨骼(左)促动踝关节,证明了与没有该装置的步行相比,该装置的的使用能使新陈代谢成本降低。Greg Sawicki及其同事开发的另一个脚踝外骨骼(中)也显示出行走时代谢成本降低但没有驱动。迄今只有极少数的外骨骼被设计用于人类跑步。密歇根州运行的外骨骼(右)在腿部有一个平行的弹簧组件,主要用于被动地起作用。
D. 针对受损人群的辅助技术设备
许多研究实验室和公司主要从事机器人外骨骼的研究,目的是帮助残疾人。我们区分主要用于辅助执行任务的外骨骼和主要用于治疗的外骨骼。本节主要介绍一系列不同的外骨骼设备,,这些设备的设计目的是帮助受损人群增加运动功能。虽然降低总体代谢成本仍然是这组外骨骼的主要目标,但它可能不是最重要的。对于典型的坐轮椅的患者来说,主要目标就是给他们足够的安全,支持和平衡。在这些人群中经常使用的临床测量方法是确定首选步行速度,通常是6分钟步行测试,较高的步行速度意味着更好的临床结果,因为步行速度与社会流动性密切相关。
ReWalk [43]是最古老,最完善的残疾人外骨骼技术之一,这种外骨骼最近被FDA批准用于脊髓损伤患者。ReWalk双侧驱动膝关节和髋关节,使脊髓损伤患者能够步行、站立和静坐机动[44]。患者通过遥控器控制设备的高级功能,并将电池和控制器放在背包中。ReWalk已经进行了一些著名的临床研究[43],[45],[46]。该设备的一些限制包括它的体积,手腕控制,以及学习如何控制它的复杂性。
Cyberdyne是一家日本公司,它帮助开发和销售了混合辅助肢体(HAL)外骨骼技术(图3)。该技术适用于不完全脊髓损伤、中风和其他损害行走功能的缺陷的患者[47]-[51]。HAL具有驱动膝关节和髋关节的单侧和双侧版本,它是目前市场上唯一利用来自其用户的剩余表面肌电图(EMG)信号的下肢外骨骼。EMG信号与关节扭矩呈非线性关系,与单独的运动学和动力学传感器相比,它能提供更高水平的患者与设备的交互作用[52]。在早期的研究中,研究人员证明了使用表面EMG控制HAL[53]的可行性,甚至在系统为各种任务提供了积极的帮助的情况下,也显示了肌肉使用的减少[54]。十多年来,HAL一直是外骨骼技术领域的创新领导者,其独特之处在于它从开发初期就将神经信号纳入控制回路。由于文献中缺乏性能数据,以及日本以外地区缺乏广泛使用,其限制很难评估。
Ekso Bionics开发了Ekso外骨骼(图3)装置,以协助残疾人步行和下肢运动。类似于HAL和ReWalk外骨骼,Ekso双侧驱动膝关节和髋关节,它目前主要在物理治疗师的指导下用于步态训练,并可以为治疗师提供设备的手动控制。使用它的可行性已被证明用于脊髓损伤[55],并且在世界范围内正在进行更大规模的临床试验。在这一点上,设备的主要缺点是适应步态环境或任务的变化的步态速度和灵活性的限制。
本田开发了两种步行辅助装置:一种称为步幅管理系统,另一种称为体重支持系统。本田的步幅管理系统与其他系统完全不同,它只在髋关节处驱动[56]。本田最近宣布与芝加哥康复研究所合作,在步行辅助设备上对中风患者进行临床试验[57],关于这些设备的工程细节很少。
“Indego外骨骼”(图3)是由帕克-汉尼芬公司为脊髓损伤患者销售的,Indego双向启动膝关节和髋关节,并在腰部周围放置一个电池组。因为Indego exoskeleton来自于一个大学的研究实验室,所以关于它的设计信息比在工业环境中设计的外骨骼更多。Indego使用一个联合级控制器,该控制器在PD模式下运行,它可以设置高增益来强制执行预先指定的连接角轨迹[58],或者控制器几乎模拟一个弹簧阻尼器系统的阻抗模式[59]。较高级别的控制由控制每个控制器的有限状态机组成,状态机负责让用户在坐、站、走等模式之间进行切换[59]。Indego系统的一个有趣的优点是它是模块
全文共21041字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16458],资料为PDF文档或Word文档,PDF文档可免费转换为Word

