英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
移动设备的静态功耗:用于无线室内定位的自适应更新射频地图
Chenshu Wulowast;dagger;, Zheng Yanglowast;, Chaowei Xiaolowast;, Chaofan Yanglowast;, Yunhao Liulowast;, and Mingyan LiuDagger;,
lowast;School of Software and TNList, Tsinghua University
dagger;Department of Computer Science and Technology, Tsinghua University
Dagger;Department of EECS, University of Michigan
摘要:移动计算的增长促使基于WiFi的室内定位成为无处不在应用中最具吸引力和最有前途的技术之一。这些技术的主要关注点是要实现减轻恶劣的室内环境动态,尤其是对于长期部署。尽管在基于WiFi指纹的定位方面进行了大量研究,但是射频地图适应问题尚未得到充分研究并保持开放。在这项工作中,我们提出了AcMu,一种用于无线室内定位的自动、连续的射频地图自我更新服务,它利用了移动设备的静态行为。在静态时,我们通过使用新的轨迹匹配算法准确查明移动设备,收集实时RSS样本并把它们用作移动参考点。有了这些新的参考数据,我们通过学习不同位置之间的RSS关系来调整相对稳定的完整射频地图。在6个月内进行了20天的实验表明,AcMu能够有效地适应随时间变化而变化的RSS,并能够准确预测新的射频地图,平均误差小于5dB。此外,AcMu通过维护最新的射频地图提高了两倍的定位精度。
引言
过去十年见证了各种无线室内定位技术的概念和发展,其中包括WiFi,RFID,声音信号等等。由于WiFi基础设施的广泛部署和可用性,基于WiFi指纹的室内定位已成为无处不在应用中最具吸引力的技术之一【1】-【6】。特别是基于指纹方案的两个关键问题,现场调查(也称为射频地图构建或校准)和定位误差最近已被广泛研究。许多研究人员已经证明了通过众包自动构建射频地图的可行性,从而消除了繁琐的校准【1】-【3】。至于准确性,用来捕获人员移动性的智能手机内置惯性传感器已被纳入,以减少仪表或亚米级的位置误差【5】,【7】,【8】。尽管这些创新已经促使基于指纹的定位成为首选方法,,有一个关键问题尚待进一步解决:射频地图在长期部署中的更新问题。
众所周知,RSS易受环境动态影响,包括瞬时干扰,例如移动的主体,门开闭,以及类似的光,温度,湿度和天气条件的长时间变化。复杂室内环境中的密集多径会进一步夸大RSS时间波动。因此,在定位段测量的实时RSS样本可能会大大偏离初始射频地图中存储的样本。因此,静态射频地图可能会逐渐恶化甚至崩溃,特别是长期部署,导致严重不准确的位置估计。为了克服这个问题,一个直观的解决方案是重复现场勘测程序,但这需要耗费人力和时间。早期的努力诉诸于一组固定的参考锚,另外部署了新的RSS观测以适应射频地图【9】-【13】。然而,部署额外的设备价格昂贵且不可扩展,从而阻碍了基于指纹定位的固有优势。众包的射频地图为自动更新铺平了道路,然而,它们中的大多数被指定为自动构建而不是持续更新,因此还没有出现特定和实用的解决方案【1】-【3】。
如今手机拥有强大的计算,通信和传感能力,并且充当人与环境之间越来越重要的信息接口。因此,在这篇文章中,我们提出这样的问题:是否可以使用移动设备自动连续更新射频地图,而无需额外的硬件和额外的人工干预?来自移动计算的洞察力带来了惊人的正面答案。我们注意到大多数移动设备(主要是iPad和智能手机)实际上保持静态一段时间。特别是,根据我们对校园用户的主要跟踪,我们发现大多数用户的静态时间百分比可能会惊人地超过80%。移动设备处于静止状态时,可充分成为一个可移动参考节点,从而可用以收集它当前所在位置的大量最新指纹。具体而言,一台设备可以在一天内在多个地点进行测量,并可以利用众多普通设备。因此可以快速有效地收集新数据。如果这些参考点的位置足够准确,那么可以将大量新收集的数据分布在不同的点上,以适应当前的射频地图【5】,【7】。这基本上意味着射频地图可能每天不断更新。如果射频地图是最新的,即使从长远来看,定位服务的质量也可以持续保持,从而可以准确定位来自移动设备的预期参考点以进行地图更新。
受这些观察的启发,我们提出AcMu,利用移动设备的静态行为的一种自动和连续射频地图更新服务。它被用于无线室内定位。AcMu采用普通用户的移动设备作为可移动的参考点,以便当设备在特定位置静止时收集最新的指纹。为了准确定位这些参考点,我们使用惯性传感器监测移动用户的移动轨迹,并且提出基于轨迹匹配的新型定位算法,其将移动轨迹与指纹和几何约束一起叠加到位置空间中。一旦收集到足够数量的附有估计位置的参考点,我们就会触发地图更新程序以适应当前的射频地图。具体而言,我们使用偏最小二乘回归来学习初始射频地图的参考点和其他位置的RSS之间的预测关系,并且在此基础上,利用来自参考点的实时RSS在每个位置推导新的指纹。其基本原理是,RSS依赖于邻居的潜在关系随着时间的推移会相对稳定,因为邻居位置可能反映了周围环境中类似的动态变化,尽管RSS值可能因个别位置而改变【11】,【12】。之后,使用新到达的数据相应地调整射频地图。然后,更新的射频地图替换先前的最新版本以在其后提供所有位置查询,包括随后的可移动参考点。
我们对AcMu进行原型设计,并在超过6个月的时间内在典型建筑物中进行20天的实验。 实验结果表明AcMu有效地适应了由环境动力学引起的RSS变化,平均预测误差约为5dB。 此外,通过维护最新的射频地图,AcMu为现有定位技术的定位精度提供了2倍的提高。
总之,我们做出以下贡献:
- 我们利用移动设备设计无线室内定位射频地图的自我更新方法,无需额外的硬件或额外的用户干预。
- 我们提出了一种精确定位的轨迹匹配算法。 与以前的概率方法不同,我们的方法全局优化整个轨迹的残差。
- 我们调查移动设备的静态行为并挖掘它们在射频地图更新上的潜力。 虽然以前的作品主要集中在移动设备的属性上,但我们仍然深入到大部分尚未探索的静态设计中。
- 我们在真实环境中制作AcMu原型。 令人鼓舞的结果表明,AcMu在强化基于WiFi指纹的定位方面取得了重大进展,成为广泛部署的全面实用服务。
在本文的其余部分,我们首先在第二部分提供背景,在第三部分的系统概述。 然后在第四部分详细介绍系统设计,并在第五部分介绍实施和评估。第六部分回顾相关工作,并在第七部分对这项工作 做个总结。
背景知识和测量分析
在本节中,我们首先进行主要测量以了解RSS动态,并介绍射频地图更新问题的初步背景。
- RSS动态的测量
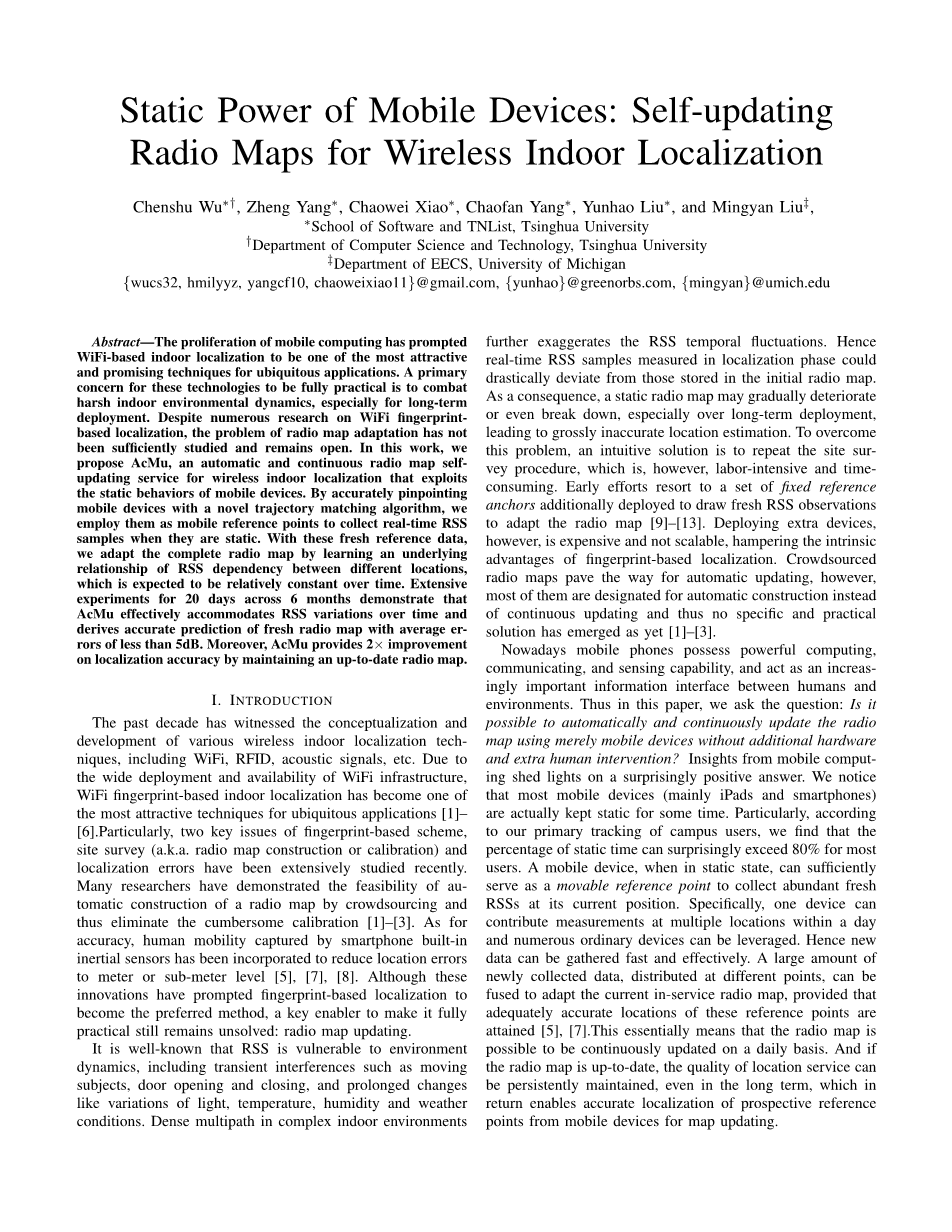
虽然众所周知RSS易环境被变化的影响,但我们对变化的程度进行了定量测量并找到了一些有趣的观察结果。 1)如图1a所示,短时间内的样本不能描述RSS分布在特定位置的真实特征。 因此,即时RSS测量(例如移动轨迹期间的测量)不足以作为位置的指纹,这就是为什么在现场勘测期间需要在每个位置收集大量样本的原因。 2)如图1bcd所示,RSS的变化在几天的短期内很小,但在较长时期内分散到相当的规模。 因此,静态射频地图会对长期部署造成严重偏差。
RSS变化可能是由瞬态干扰引起的,例如移动物体,开门和关门,或长时间的动态变化,如光照,温度和湿度变化以及环境中的天气变化。 邻近地点的这种动态是相似的。 因此,即使RSS的每个位置都发生了很大的变化,附近的RSS测量的某些潜在关系也可能会存在并保持相对稳定。 这一基本直觉支撑了利用一组参考点的实时数据更新自动射频地图。
(a)RSS分布随测量的量的不同而不同。(b)不同接入点在特定位置的RSS变化。(c)一个特定AP在不同位置的RSS变化。(d) 不同地点的不同接入点的RSS变化。
图1. RSS在不同时间段的变化 (a)5个连续采样的平均RSS值可能会与50个采样的最大值相差10dB。 (b)(c)(d)长期的RSS变化(与初始测量相比)显着大于几天内的短期变化。
- 基于参考点的射频地图更新
通常,射频地图RM包含感兴趣区域中的所有采样点上的指纹位置关系的元组。感兴趣的物理区域采样为有限位置空间L = {l1,l2,...,l n},其中n是采样位置的总数,每个位置附有坐标li =(xi, yi),1 le;ile;n。相应地,射频指纹被建模为信号空间F = {f1,f2,...,fn},其中每个fi = {fi1,fi2,...,fip}是与位置li对应的指纹记录,fij表示第j个 AP的RSS值,1le;jle;p,p是目标位置空间中AP的总数。请注意,对于概率定位方法,将RSS分布而不是RSS值存储为指纹。一旦在手动或手动阶段构建,射频地图就可以用于后续位置查询而无需调整。然而,静态射频地图与动态室内环境之间的矛盾严重挑战了位置估计的有效性。
考虑到环境动力学,介绍了几种射频地图更新技术。 射频地图更新的任务是在时间点ti将时间点ti-1处的射频地图RMi-1适配到更新的一个RMi以适应不确定的环境变化。 以前的作品如LANDMARC和LEASE会使用密集的参考锚,即已知和固定位置的接收器来收集实时样本以抵消RSS变化。 为了减少所需锚点的数量,引入了一类基于学习的技术,它在特定时间学习了在这些参考点和其他地图上的样本之间的函数关系,并将学习到的关系与新收集的参考点数据相关联,以预测其他新的RSS 时间瞬间。
在AcMu中,我们的目标还是减少RSS的变化并保持最新的电台地图,但是不再需要额外的参考点以及额外的用户干预。
概述
本节简要介绍我们的设计。 我们的目标是扩展在一个时间点建立的射频地图,以适应环境动态,因此可用于其他时间点。 在AcMu中,我们通过利用移动设备收集足够数量的新鲜RSS样本来完成此任务。 关键的是静态移动设备可以被视为可移动的参考点,这些可移动的参考点可以为实现射频地图提供实时RSS样本。 虽然以前的工作已经证明了在固定参考发射机的帮助下学习时间变化的可行性,但是将这种直观的想法转化为实际系统带来了明显的挑战。
1)与有意部署的固定位置信息的参考点不同,即使移动设备在特定点处静止,也很难获得完美的移动设备位置。
2 )与固定参考点不同,基于移动设备的可移动参考点的数量和位置随着每次更新而改变,这增加了对参考点与射频地图中的其他位置之间的关系进行建模时的困难。
3)由于室内环境中复杂的无形信号传播,参考点和其他位置的指纹之间的基本关系并非微不足道。
为了应对这些挑战,AcMu包含三个主要部分,即大头大头针数据采集,参考点估计和射频地图更新,如图2所示。来自移动用户的数据在日常工作和室内空间生活中自动记录。 具体而言,射频信号在移动设备保持静止一段时间时进行测量。 当用户正在移动时,收集无线数据和运动数据以监视步行轨迹。 收集到的数据(以大头针数据为参考)随后会实时或延迟上传,直到适当的WLAN可用为止,后端服务器将进行进一步处理。 任何出席兴趣领域的用户都可以参与数据收集。 此外,一名用户可以在一天内提供多组数据,具体取决于他/她的移动行为和设备状态(包括电池,使用情况,动作等)。
图2. AcMu的系统架构
然后将在后端服务器处接收的数据馈送到参考点估计模块以提取用于地图更新的参考点。 为了尽可能精确地定位静态移动设备,大头针数据中伴随的移动轨迹被用于轨迹匹配。 一旦获得足够数量的参考点,基于参考点的RSS与从初始射频地图学习的其他位置之间的基础关系,将新获取的数据更新整个射频地图。 然后将用于环境变化的更新的射频地图用于进一步的位置查询的在线定位。
请注意,在更新过程中,用户无需显式地参与测量和上传数据。 所有数据都通过移动设备上运行的后端服务自动进行静默收集。AcMu不会影响正常的本地化服务,因为地图更新可以在非服务时间期间执行,例如在夜间。 另外,我们不修改经典指纹定位方案的工作流程,因此所提出的方法与现有的无线定位系统兼容,特别是基于智能手机的无线定位系统【1】-【4】,【14】。
方法设计
本节首先说明如何收集用于指纹地图更新的特定格式的大头针数据。 然后,在此基础上介绍了如何从这些数据之中提取参考点并最终更新整个指纹地图。
- 大头针数据收集
大头针数据规格。尽管最近的大量工作表明定位可以从用户移动性中受益【1】-【3】,但我们还会进一步调查和利用移动设备的静态行为。具体而言,当检测到移动设备静止时收集的数据可以作为适应射频地图的参考数据。相反,用户移动时记录的数据被推测为有利于精确定位。因此,我们试图收集包含两部分的数据:在静态下测量的相对大量的RSS样本,以及在移动期间一系列RSS矢量以及移动性数据。我们将这些数据称为大头大头针数据,因为它们包含一堆“单点数据”和一段“路径数据”的短尾。我们必须收集大头针数据的原因是,只有大量的RSS样本能够描述无线信道特性,而具有移动性限制的轨迹数据在获得静态点的充分定位精度方面很有前景。单独的静态数据和移动数据都不能完成射频地图更新任务
移动性监控。为了收集大头针数据,一项基本任务是监视移动用户的运动状态。 为此,我们对由内置加速计传感器报告的加速度数据进行局部方差阈值方法【1】,以检测移动设
全文共17454字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13877],资料为PDF文档或Word文档,PDF文档可免费转换为Word

