英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
高分辨率宽幅SAR系统的同步静止场景成像和地面移动目标指示
摘要:在合成孔径雷达(SAR)图像中,由于SAR积分期间目标的运动,移动目标通常会在不正确的位置产生模糊和/或成像。此外,由于高分辨率宽频带SAR系统的工作频率相对较低,运动目标会在重建的SAR图像中产生多个虚反射目标。本文提出了一种新的时空自适应处理框架,用于去除SAR图像中的运动目标伪影。在这个新框架中,提出了动态转向矢量的概念。此外,本文还针对高分辨率宽带SAR系统,开发了一种用于杂波抑制和移动目标成像与定位的移动目标处理方案。最后,我们将聚焦良好的移动目标定位在静止的场景图像上,而没有任何干扰的伪影。最后,我们将聚焦良好的移动目标定位在静止的场景图像上,而没有任何干扰的伪影。仿真和真实数据用于验证我们提出的方法的有效性。
索引词——高分辨率宽幅,移动目标成像,移动目标定位,时空自适应处理,固定场景成像,合成孔径雷达(SAR)
一 介绍
合成孔径雷达(SAR)是一种遥感技术,能够提供不受天气影响的高分辨率图像,并且由于其增强SAR系统性能的能力而受到更多关注[1] – [12]。为了解决高分辨率和低脉冲重复频率(PRF)之间的冲突,提出了一种沿着方位角方向的高分辨率宽波段SAR系统的多通道解决方案,该冲突已在高分辨率和宽带宽SAR成像中遇到。此外,高分辨率的广域合成孔径雷达系统可以为地面移动目标指示(GMTI)能力提供巨大的潜力,因为方位角的空间自由度也可以用来抑制背景杂波[10] – [18]。机载雷达系统(如相控阵多功能成像雷达)用作机载X波段平台[11],旨在以非常高分辨率和远距离演示SAR成像。 此外,五个并行接收通道可以通过时空自适应处理来支持诸如GMTI之类的阵列处理技术。航天高分辨率雷达系统,例如TerraSAR-X [12]和RADARSAT-2 [13],也可以通过将专门设计的测量模式与合适的信号处理方法相结合来执行精细的GMTI模式[10]。静止场景成像处理通常会导致运动目标成像,并由于SAR积分期间目标运动而将其涂抹在合成的SAR图像中[19]-[23]。 另外,由于高分辨率宽幅SAR系统以相当低的PRF运行,因此移动目标将在方位上产生多个幻影目标。在这里,重影目标在SAR社区中也称为方位角模糊性。 这些移动的目标伪像可能会误导SAR图像的解释,因为它们会在不正确的位置复制目标(物体)并覆盖静止的场景。文献[21]-[23]提出了一种基于传统时空自适应处理框架的适当滤波器设计,用于去除SAR图像中的运动目标伪像。但是,传统的时空自适应处理框架[24] [27]需要很大的自由度来抑制高分辨率宽幅SAR系统的多个运动目标。一般而言,抑制运动目标所需的空间自由度的数量等于SAR场景中运动目标的数量乘以多普勒模糊度数,即PRF欠采样数[28]。在实践中很难满足该要求。 因此,传统的时空自适应处理框架可能会限制[21]-[23]中提出的时空滤波方法的性能。
为了克服上述问题,本文提出了一种新的时空自适应处理框架,用于去除SAR图像中的运动目标伪像。主要思想是压缩移动目标的时空频谱,以便在时空平面内没有用于移动目标的混叠信号分量。 通过使用建议的时空自适应处理框架,只需要一个空间自由度即可抑制一个运动目标。另外,对于多运动目标的情况,进一步提出了动态转向矢量的概念。 如果成像场景中的多个聚焦移动目标在方位上彼此不重叠,则一个自由度足以抑制所有这些移动目标。通过使用动态转向矢量的概念,理论上,抑制移动目标所需的自由度数量必须等于在方位角上彼此重叠的聚焦移动目标的最大数量。但是,聚焦运动目标在SAR图像中可被视为稀疏的[29] – [31]。它们仅位于时空平面中的某些角度和多普勒频点上,因此,移动的目标在方位角上相互重叠的可能性较小。 结果,通常,两个自由度足以抑制运动目标。
关于运动目标的处理,已经有一些对低PRF高分辨率宽波段SAR系统进行杂波抑制和运动目标成像的研究,如[13] – [15]。在[13]中,使用RADARSAT-2数据验证了GMTI在具有高分辨率宽幅成像能力的多通道SAR系统中的可行性。在[14]和[15]中对用于高分辨率宽波段SAR系统的GMTI进行了进一步研究。 然而,[14]和[15]中的方法要求严格满足统一的采样条件,并且接收通道的数量大于多普勒模糊度数量的两倍,这可能会极大地增加系统的复杂性。而且,在[14]中没有考虑移动目标位置。 提出了一种结合运动目标位置的杂波抑制方法。所提出的杂波抑制方法基于时空自适应处理,不仅适用于均匀采样情况,还适用于非均匀采样情况。另外,我们提出的杂波抑制方法可以通过使用比第二个多普勒模糊度数小的方位角自由度来实现。但是,我们提出的方法是基于空时自适应处理的,与[14]和[15]中的相移中心天线杂波抑制方法相比,它增加了计算复杂度。
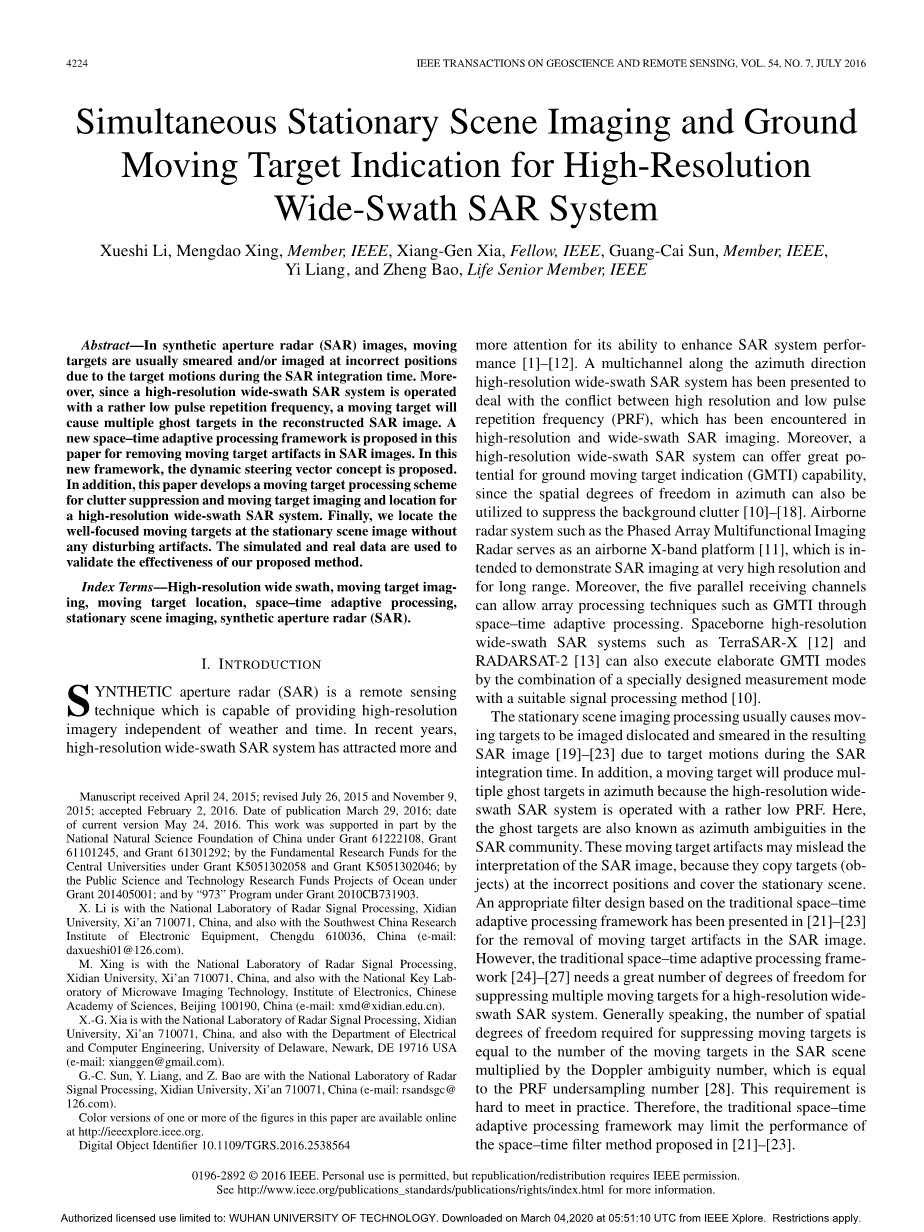
图1 多通道SAR的几何形状。
在方位角高分辨率宽带宽SAR系统中的多通道中,由于PRF设计为小于瞬时信号带宽,因此在每个通道中都会发生混叠。为了获得运动目标的信号,可以使用线性约束[32]来抑制背景杂波的模糊信号分量。标准的线性约束最小方差(LCMV)处理器权重旨在在受到某些线性约束的情况下最大程度地降低输出功率[32]-[34]。 但是,LCMV处理器可能具有较高且不规则的旁瓣,并且此行为可能导致方位上出现幻影目标。由于将真实的移动目标与其方位的幻影区分开来,这将使移动目标的检测和定位变得更加复杂和具有挑战性。为了解决这个问题,在阵列信号处理中采用带二次模式约束的LCMV波束形成(LCMV-QPC)方法[35]-[37]来抑制背景杂波,从而可以开发出具有指定旁瓣电平的波束形成器。在LCMV-QPC方法中,根据标准LCMV标准设计自适应权重矢量,并应用二次模式约束来限制与所需模式的偏差。阵列信号处理中的LCMV-QPC技术旨在为LCMV自适应波束形成器提供主波束和旁瓣控制。
本文的组织如下。在第二节中,介绍了多通道SAR的信号模型。在第三部分中,提出了一种时空自适应处理框架,该框架可以有效地抑制SAR图像中的运动目标伪像。在第四节中,提出了一种运动目标处理方案,该方案包括杂波抑制以及运动目标成像和定位。在第五部分中,提供了仿真和实际数据处理结果以验证所提出的方法。最后,在第六节中总结了本文。
二 多通道信号模型
具有移动目标的M通道SAR的几何结构如图1所示。雷达以速度v沿X轴移动。假设中心通道是参考通道。参考通道发送信号,并且在所有M个通道接收回波波形。从通道m到参考通道的方位角偏移用dm表示,其中m = 1,hellip;,M,M是通道数。运动目标C(0,)与通道m之间的瞬时倾斜范围可以表示为
其中是最慢的时间,而和分别表示移动目标的横向轨迹(c.t.)和沿轨迹方向(a.t.)的速度。在SAR系统的数据收集过程中,假设移动目标以恒定速度运动。带有方位角位置X的移动目标的倾斜范围可以表示为[38],其中满足。 通过将移动目标的速度设置为零,可以获得静止场景的瞬时倾斜范围。对于移动目标,瞬时倾斜范围可以近似表示为. 在通道m处接收到的运动目标P的往返瞬时倾斜范围可以近似表示为,其中是参考通道的瞬时倾斜范围。
假设从参考信道发送线性调频波形。 进行距离压缩后,在通道m处接收到的运动目标的回波信号被转换到范围-频域,可以得到
其中表示范围-频率窗口函数,表示方位角时间窗口函数,表示信道的权重函数,表示范围频率,表示载波频率。
三.运动目标的抑制,SAR图像的伪像
在这里,为了使SAR图像没有运动目标伪像,我们提出了一种时空自适应处理框架,可以有效地抑制运动目标。基本上从SAR聚焦中使用的SPECAN处理器中提取方位角deramp处理[39],它通过以下函数[38]来压缩移动目标多普勒带宽:
然后,方位傅里叶变换(FT)之后的运动目标的多通道回波信号可以表示为
其中,和表示方位角频率。为了通过方位角去斑处理获得运动目标和静止场景的时空频谱分布,可以将(4)变换为角域。通过将FT设置为,将FT取为(4)中的信号值域反FT,可以得到
其中;和分别是方位角频率和角度窗口函数。从(5)中可以注意到,移动目标的时空频谱分布为
其中lambda;代表载波波长。如果我们将移动目标的速度设为零,那么我们可以获得静止场景的时空频谱分布,即
如(6)和(7)所示,通过方位角去斑处理,运动目标和静止场景的时空频谱分布保持不变。但是,应该注意的是,在经过方位去皮后,将移动目标粗略地聚焦在多普勒域中。本文将时空自适应处理与方位角偏移处理相结合作为时空自适应处理框架,将传统的时空自适应处理方法[25]-[27]作为时空自适应处理框架。在传统的时空自适应处理框架中,运动目标类似于固定场景,两者都是混叠的,并且多普勒模糊度数等于PRF欠采样数[4],[34]。但是,在deramp时空自适应处理框架中,移动目标的方位被粗略地聚焦,并且没有混叠信号分量。
图2通过使用两个时空自适应处理框架,表示了时空平面中静止场景和运动目标的时空频谱分布。绿色粗实线表示静止场景的时空频谱线,图2(a)中的红色细实线和图2(b)中的红色圆圈表示运动目标。在这里,我们考虑将PRF设计为杂波方位角带宽的五分之一的情况。在两个时空自适应处理框架中,静态场景被混淆了,在这两种方法中,多普勒模糊度数均等于5。因此,在两个时空自适应处理框架中用于静止场景频谱重建的自由度数是相等的。
图2 通过使用(a)传统时空自适应处理框架和(b)deramp时空自适应处理框架,静止场景和运动目标的时空频谱分布。
图3 通过使用deramp时空自适应处理框架,静止场景和两个运动目标的时空频谱分布。
图2(a)中的移动目标被混叠了,多普勒模糊度数仍然是5。但是,在图2(b)中,移动目标被粗略地聚焦了方位,并且没有混叠的信号分量。可以注意到,使用传统的时空自适应处理框架来抑制一个运动目标需要五个自由度,因为在时空平面中一个运动目标有五个混叠信号分量。如果同时存在多个目标,则抑制移动目标所需的自由度将大大提高。 但是,从图2(b)可以明显看出,通过使用deramp时空自适应处理框架来抑制一个运动目标仅需要一个自由度。如果有多个目标,我们可以根据运动目标的分布构造动态转向矢量。 图3示出了两个移动目标的情况的示例。T1和T2用于显示动态转向矢量的构造。在多普勒频率的区域中,我们可以利用一个自由度,例如在角度附近放置一个零,来构造用于抑制目标T1的操纵向量。合成了光束图案,如图3左侧所示。可以改变这一自由度,例如可以将角度附近的零调整到角度附近,以构造用于在多普勒频率的频率区域中进行静态场景频谱重构时抑制目标T2的转向矢量,并合成光束图,如图3右侧所示。因此,如果目标的聚焦位置在方位上彼此不重叠,则一个自由度足以通过使用动态转向矢量概念来抑制多个运动目标。通过利用动态转向矢量概念,理论上,抑制移动目标所需的自由度数量必须等于在方位角上彼此重叠的最大移动目标数量。但是,聚焦运动目标在SAR图像中可被视为稀疏[29] – [31]。它们仅位于时空平面中的某些角度和多普勒频点上,因此,移动的目标在方位角上相互重叠的可能性较小。因此,通常,两个自由度足以抑制运动目标。在高分辨率广域SAR系统中,PRF将始终小于方位角信号带宽,以获得高分辨率和广域SAR图像。 因此,在每个通道中都将存在混叠。 为了获得用于抑制运动目标的动态转向矢量的表达式,我们将式(4)重新表示为
其中N表示多普勒模糊度数。(8)中的第一个指数项通过以下替换实现:. 在这里,我们假设N是一个奇数。如果N是偶数,则(8)中求和符号的下限和上限应分别为和。
然后,可以将用于抑制运动目标的动态转向矢量构建为
并应用于(8)中的信号。在(9)中,,并且可以由一个移动目标确定,该目标位于其中,移动目标区域定义为a的两个相邻时空谱线之间的区域静止场景,如图3所示,即对应于区域1。被定义为的阶跃函数,其值可以通过最小化目标信噪比来估计图像域中的噪声比(SCNR)[33]。在第IV-A节中介绍了在杂波抑制之后位于哪个区域的已知运动目标。关于参数d的选择,一方面是最小可检测的c.t。速度由天线长度决定;另一方面,移动目标的盲速度由天线间隔决定。因此,天线设计是天线长度和天线间隔之间的权衡。利用(10)中描述的LCMV方法[32],将杂波的预期信号分量设置为1,并将杂波和运动目标的混叠信号分量设置为零,从而实现了清晰的杂波频谱重建可以从以下位置获得实现移动目标抑制的效果
其中是约束矩阵,是所需的杂波方向,是约束杂波方向,是相应的约束矢量,协方差矩阵由多通道数据估算,并且。进行杂波频谱重构后,将没有移动目标干扰的杂波回波信号转换到方位时域,然后可以通过以下函数利用去采样处理的方位逆来补偿(3):
经过方位斜波处理后,便可以使用精确的距离偏移算法(RMA)[40]-[42]来校正距离像元偏移(RCM)。最后,可以利用去毛刺方法[43]-[45]来实现静止场景的方位角压缩。
四.杂波抑制和移动目标成像和定位方法
在这里,我们为杂波抑制和运动目标检测,成像和定位开发了运动目标处理方案。
A.抑制杂波的LCMV-QPC方法
如果采用LCMV方法[32]来抑制背景杂波(8),则由于不同光束步进穿过运动目标区域而导致的幻影目标将出现在方位角上。LCMV处理器可能具有较高且不规则的旁瓣。 为了开发低旁瓣电平的波束形成器,引入了在阵列信号处理中采用二次模式约束方法的LCMV处理器来抑制背景杂波。在这里,我们对LCMV-QPC技术进行说明。在阵列信号处理中,阵列自适应过程可以在干扰方向上形成零点。因此,可以消除干扰。但是,旁瓣电平始终很高,这并不是期望的。这是因为,如果干扰的方向快速变化或干扰突然出现,则自适应加权矢量无法抑制干扰。如果可以
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238919],资料为PDF文档或Word文档,PDF文档可免费转换为Word

