
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
保持真实:为严肃游戏创造和获取资产
作者:Paul Bourke1 Jeremy Green2
文章上传时间:2016年3月27日
接受时间:2016年5月26日
网上公布时间:2016年7月19日
发布媒体:2016年纽约斯普林格科学商业媒体
摘要:本文介绍了一个项目的数据收集方法,旨在创建一个类似于西澳大利亚历史上重要位置的虚拟游戏。目标不仅仅是传达一个地方的感觉,更多的是关于创建一个准确的表示。如果使用图像和3D模型等数据来表示位置上的特征不可用或近似,则这些数据仍然会丢失,而不是填充解释或插值。由此产生的虚拟环境更接近考古记录或数据库,而不仅仅是一个可以浏览和体验的3D环境。有人提出,由此产生的虚拟环境带来了额外的可信度,并且看起来比通过任意建模和通用纹理增强更真实。介绍了所采用的数据采集方法,在现场进行数据采集时遇到的限制,当前技术施加的限制以及最终所采用的各种技术中的其余挑战。
关键词:虚拟环境,严肃游戏,虚拟现实,数字资产,遗产数据,Unity3D,3D重建,照片纹理
1 基本介绍:
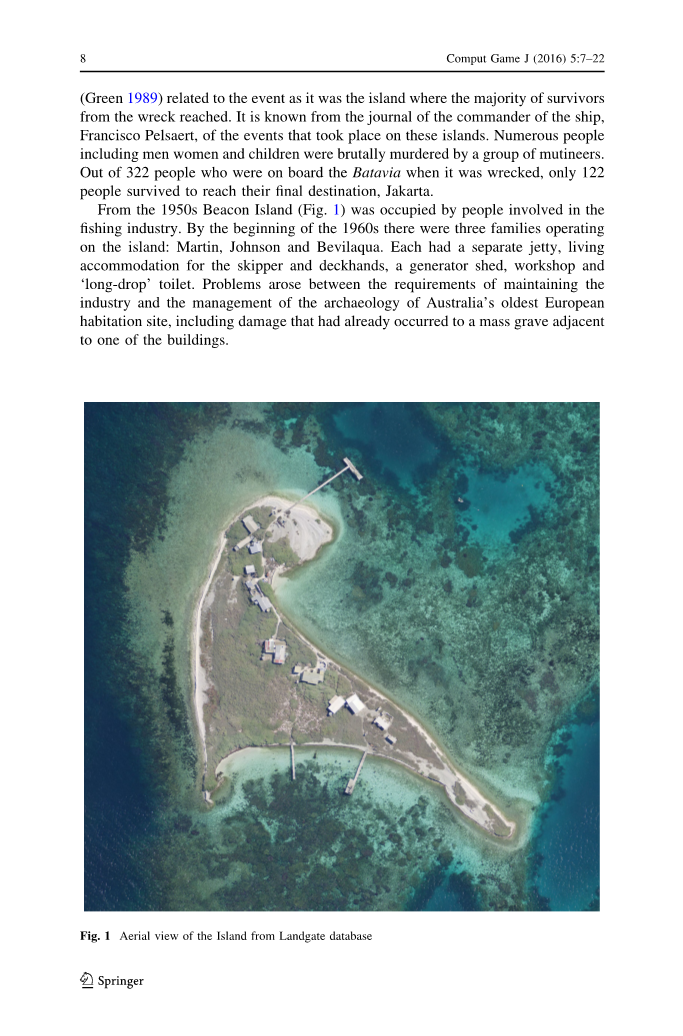
1629年,荷兰东印度公司Batavia(绿色1975)发现的沉船遗址一直与沉船遗址附近的岛屿上的陆地考古遗址有关。而灯塔岛作为主要的遗产之一是重要的(Green,1989),因为它是大多数沉船幸存者到达的岛屿。 从船长弗朗西斯科·皮尔塞特的日志中可以看到发生在这些岛屿上的事件。 包括男子妇女和儿童在内的许多人被一群叛乱者残酷杀害。 在巴达维亚遇难的322人中,只有122人幸存下来,抵达他们的最终目的地雅加达。
从20世纪50年代开始,灯塔岛(如下图所示)被参与捕鱼业的人占领。 到20世纪60年代初,岛上有三个家庭经营:马丁,约翰逊和贝维拉夸。每个人都有一个独立的码头,为船长和deckhands生活的住所,发电机棚,车间和#39;长拖#39;厕所。 澳大利亚最古老的欧洲居住场所的考古管理和维护行业的要求之间出现了问题,包括邻近其中一座建筑物的集体坟墓已经发生的损坏。
西澳大利亚博物馆根据州和联邦法律对这些场所负责。由于灯塔岛发展中出现问题,开展了将渔民从岛上搬迁的谈判。 在这个过程中,WA博物馆获得了您的社区遗产资助,开始记录这些建筑物及其遗产重要性。这样做的目标是,当渔民搬迁时,建筑物将被拆除,因此记录这些建筑物和岛屿在后代的形态是非常重要的。2013年,西澳大利亚大学获得澳大利亚研究理事会联合资助,称为咆哮40年代的沉船。 这笔赠款的目的之一是调查自从20世纪70年代和80年代西澳博物馆工作以来已经可以获得的海洋考古学新技术。
于是他们决定将这个遗产项目纳入咆哮40s ARC中赠款的一部分,并提出制作Beacon岛和钓鱼家庭建筑的数字3D表示的想法。创建虚拟环境的目的是希望在数字化记录该岛之前,随着建筑物的拆除而发生根本变化,并创建一个平台,通过这个平台可以将历史和未来的数据置于地理环境中。虚拟表示还需要具备足够的质量,使其能够在简单的在线体验到高分辨率虚拟现实室的各种演示模式中进行部署。在探索新的数字记录和处理技术时,决定确保虚拟表示的所有方面都应来自实际数据,以避免可能的插值和解释。 具体而言,确保所有二维和三维元素都基于岛上记录的数据,而不是例如自由创建或使用通用资产。
软件平台的选择是Unity3D,由于当时在研究小组中采用并具有专业知识而作出的决定,同时也因为它支持与项目相关的广泛部署选项,包括但不限于以下内容:
1.头戴式显示器(Cakmakci和Rolland 2006),如Oculus Rift或GearVR。
2.高分辨率立体显示装置,例如基于投影仪和平铺单元的所谓动力墙。
3.半球形穹顶,面向iDome(Bourke 2009)和水平定向穹顶,如天文馆中所见。
4.高分辨率身临其境的圆柱形显示器(Reda等2013)通常由计算机集群而不是单个工作站控制。
5.在线网页传送。
以上条件的操作可以让他满足至少可以在Mac OSX和MS Windows上部署。
2 数字资产:
下面总结了两次实地考察期间获得的数字资产。 在2D打印格式中可能出现的每个示例都会被呈现。
由于建筑施工的特殊性,很大程度上是自建的,随着时间的推移随机扩展,因此不存在议会或城市规划建设计划。 幸运的是,这些设计很简单,主要是长方形的房间,门和窗户。 在两次实地考察中,精确测量了建筑物的平面图,包括门窗的位置和尺寸。因此,该岛的建筑模型可以从计划中精确地挤出,并且还可以基于少量屋顶样式中的一种应用来测量尺寸。从每个建筑物周围的多个高度和多个位置拍摄HDR照片,至少在给定相邻建筑物,拓扑结构和树叶的情况下可能。 虽然这些不是直接使用,但它们形成了对模型完整性的交叉检查,并确定了可能在两次记录会话之间降级的建筑物部分。
考虑到从拍摄的照片中采集照片来重建建筑物的可能性。有许多完全自动的算法(Snavely和Seitz 2006)以及像PhotoScan这样的软件可以从照片中重建三维几何图形(稍后将其应用于岛上更多有机几何图形)。还有一些人类指导工具被认为更适用于在建筑物中发现的强烈直线形式,并使用图像创建整个表面纹理。这种方法的两个例子可以在PhotoModeller和Sketchup中找到。然而,结果被发现显着低于计划创建的手动模型。这是由于许多原因造成的,其中包括:
1.建筑物的许多部分被树叶遮挡,至少从可用的摄像机位置遮挡,因此部分纹理无法恢复。
2.由于邻近其他建筑物,水箱或简单的碎片,一些建筑物的侧面照片不可能。
3.拍摄屋顶以获得足够的视角是有问题的。
4.生成的网格数据可能效率低下,并且通常不会逻辑映射到物理结构。
在一天结束时,熟练的建筑造型师的模型质量明显优于人类指导重建过程中的同一时间投资。 由于人类指导的半自动化方法需要在照片上手动选择具有相应像素位置和舍入误差的共同特征,因此准确度也被确定为更高,上述的许多原因也是为什么激光扫描(Elberink 2008)不是一个可行的方法在这种情况下,其他问题包括在当前的实时虚拟现实和游戏软件中处理点云困难,或将大量点云集合转化为有意义的几何。 许多带有集成相机的激光扫描仪可以给出色点,但纹理保真度比这里使用的照相技术明显更差。 激光扫描也会因无法进入建筑物的许多面而受到影响。
建筑物外部的所有纹理都以照片的形式拍摄为正射影像(Szeliski,2004),至少在可能的情况下。当由于访问限制需要倾斜照片时,照片具有剪切和拉伸变换以使它们大致为正字形,主要错误是不正确的视差。对于非特定纹理,使用基于补丁的纹理合成(Efros和Freeman 2001)创建了常规的可缩放纹理,并将其应用于没有的纹理可识别的独特功能。 当需要记录的特征时,使用单独的照片,通常是整个墙壁或墙壁的一部分,参见墙壁上的具体雕刻。特别注意拍摄所有的窗户,门和其他显着的外部特征。 最终的三维模型已经正确确定了模型中用于窗户,门和大型缺陷的开口尺寸,但它们不包含结构元素,窗框,窗台,门框等的测量。 与许多到偏远地区的实地考察一样,现场时间有限,详细的建模被认为是非常耗时的。 尽管基于照片的框架和门楣的后期临时建模很容易实现,但这被认为与项目的数据目标相关,并且不太可能像照片纹理那样逼真。
岛上的整体地形图是通过西澳大利亚州地图档案Landgate获取的。岛上有20厘米的网格,虽然可以在空中观看,但在地平面上提供了令人失望的纹理图,参见图1和图2中的地平面。随后的实地考察小岛计划使用无人机记录整个岛屿镶嵌图,但天气条件(大风)后面的技术问题妨碍了这一点。
全岛的拓扑结构进行了调查;随后对点高度进行三角化(Bourke 1989),然后将其转换为Unity3D引擎的16位灰度图。在这两个数据集中,使用3个清晰的标记成功地将空间纹理贴图注册到拓扑图中,即从勘测数据中的标题和两个建筑物角落。由于航测和拓扑调查之间的时间差异造成的,因为一些更加动态的海岸线在风暴通过时会改变形状。
岛上的地面覆盖物是沙子,小石块和贝壳的组合,直到大型珊瑚块(30厘米)。大量的正射影像是为平铺拓扑图的目的而拍摄的,目前这些拓扑图仅用航拍照片进行了纹理处理。由于该过程的任意性质,决定不通过纹理绘画应用这些因素,因为没有进行详细的景观分类。更高质量的航空图像地图可能允许可接受的纹理绘画,这将显着改善地面的视觉外观。
另一套照片采集的纹理被用于诸如码头的木质结构,旧小龙虾盆上的金属,各种管道,外部标志等等。
岛上有许多物体无法实际测量,任何手动建模都会涉及大量的解释和近似。这些主要是由大型珊瑚板组成的有机形式,它们包括三个关键物体:一座2米高的石棺,被称为戈斯的纪念碑,一艘在该地区遭到破坏的船只的船长,其遗骸可能是该岛东部的一座小楼,以及一些渔民围绕一些住宅建造的围栏。虽然不适合人工建模,但这些结构非常适合使用现代摄影测量技术从照片进行三维重建。一旦为这些模型创建了模型,它们要么根据调查数据点进行精确地理定位,要么将这些模型记录下来,然后使用它们在航拍图像上的可见位置对齐。由此产生的小型建筑物的三维模型如图5所示。这些网格可以用数百万个三角形进行高度详细描述,也可以下采样以满足图形性能预算。高分辨率纹理贴图提供了一个非常真实,并且即使是单个珊瑚块的正确演绎。
不幸的是,虽然适当准确的模型的石棺和小型建筑重建得很好,珊瑚墙却没有。这种失败主要是由于无法获得足够的位置以获得足够的照相覆盖率。用于表示珊瑚礁墙的方法是手工建模,这是对这个项目基于数据的目标的妥协,但排除这些目标的含义被认为更多的是虚假陈述而不是制造假模型来观察珊瑚墙的高度和深度。
为了为天空和海洋提供全球环境,创建了许多环境图像。这些是通过拍摄多个广角照片生成的,这些照片又通过180°球面全景拼接在一起形成一个单一的无缝360,然后根据需要重新采样到立方体地图中大多数游戏引擎。注意到对于环境地图,只需要顶部90°(水平线到北极)。
这些环境地图是在黎明前到黄昏之后的一天中的不同时间创建的,并且在午夜的另一个样本中创建,参见图6在下午7点拍摄的示例。接近日落。虽然只有8个时间步骤被捕获,但它们跨越了一天,大部分时间都是非结构化的蓝天。因此,他们可以插入到为单日内的任何时间提供样本环境。
不幸的是,目前所用软件中的环境地图不能用于使用全局照明技术来照亮虚拟空间,至少不是实时地。
在这个过程的早期阶段,人们认识到建筑物的内部太复杂了,以至于不能用3D建模,至少不能用时间和预算。图7是大多数建筑物中几何复杂性的典型示例。所采取的方法是从岛上每个建筑物的每个房间的中心捕获合理的高分辨率球形(等矩形)全景图。这与用于环境地图的技术完全相同。其结果是几乎70个气泡传达每个房间的内容的摄影感,尽管仅来自每个房间内的单个位置。
还决定以类似于虚拟参观的方式,沿着岛屿的主要道路从大约3米的相同位置捕捉这些气泡。除了体验岛屿的虚拟3D几何模型之外,还可以定期跳入摄影气泡中,并以交互方式导航视图,以便与该位置完全一样地看到岛屿。
最终这导致了另外200个来自全岛的气泡。这些融入到虚拟环境中,作为倒置的纹理球体,当人们接近它们时会淡入。如果用户进入球体,那么他们被吸向中心,因为这是球形全景看起来完全正确的唯一位置。应该注意的是,很显然,当人们从3D模型移动到摄影气泡的内部并再次出现时,气泡被正确定位和对齐以给出一致的体验。图8是来自气泡内部的照片视图和虚拟模型中相同建筑物的视图(来自稍微不同的位置)的示例,半透明气泡在左侧可见。岛上的树叶由低密度灌木丛和密集灌木丛组成,最高处大约1.5米。确定了6种主要灌木类型和统计样本。
树枝和叶子在黑色背景下拍摄,并附有比例尺规则,见图9。其目的是使用特定物种的结构知识,例如分支比率,分支间隔,厚度比率,叶片覆盖率的统计数据等等来创建植物的参数化模型,该模型可以虚拟地生长在它们各自正确的区域中。
最初想象的是,实现叶子的虚拟表示的限制因素将是几何成本。 Unity3D和其他引擎中的参数化工厂形成工具足够成熟,能够根据距离处理详细程度。限制因素就是无法使用可用的工具来创建看起来甚至接近现实的表示。
定向音频记录了岛上遇到的重要音频源。这些主要是海浪和鸟的声音,后来由燕鸥和海鸥组成。完整的Ambisonic唱片(Branwell 1983)并没有被制造出来,因为在没有商业补充的情况下,Unity无法传达。取而代之的是4通道定向录制,即使Unity只能代表全向点源。
在虚拟环境中,这些声源位于岛屿周围的空间逻辑位置。例如,燕鸥很大程度上占据了岛上的内部灌木丛,海鸥倾向于占据各个码头和海滩的极端点。
从岛上的关键位置拍摄了一些千兆像素全景图像。图10显示了一个例子,从主码头捕获的0.9千兆像素图像。虽然这些原本打算仅用作全景照片,但如果纹理资产被遗漏或不适合,它们确实提供了一定程度的保险。全景图的分辨率足够高
重新创建缺失的纹理。如果在岛上有什么地方存在问题/不确定性,它们也可以作为有用的检查,提供比在照片档案中搜索大量任意定位和定向图像更快的现实检查。
岛上树叶的可信表现证明是有问题的,并且是最重要的缺失特征。尽管已经仔细地捕捉了植物物种的概况并对分枝和茎/叶的概率进行了分类,但所创建的参数化植物模型从未出现过甚至接近真实的物种。试图通过精心设计的,但非参数化的工厂进行改进,显然会导致一个环境,从来没有足够的图形能力进行实时交互。虽然参数化植物模型通常会在游戏中产生非常可信的通用地面覆盖物,但在具有已知的目标植物外观的情况下进行反向操作似乎仍然存在很大问题。
一个频繁的决定是何时使用不同类型的纹理,具体来说,何时要坚持完全原始的全覆盖(例如:门),何时允许使用平铺纹理(例如:码头上的板)以及何时应使用平铺纹理(如:屋顶铁或普通铁锈)。指导原则是纹理是
全文共8507字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16384],资料为PDF文档或Word文档,PDF文档可免费转换为Word

