
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
垂直偏振雷达回波的方位依赖性观测及其与光学厚度的关系
Nathalie Roy, Gilles Roy, Luc R. Bissonnette, and Jean-Robert Simard
我们采用一种门增强的CCD像机测量线性偏振激光穿过球形粒子组成的云层的垂直偏振后向散射光。根据早期发表的结果,我们在记录的图像中观察到清晰的方位角图案。我们证明了这种模式是对称的,它是由二阶散射引起的,而高阶散射引起的模糊随着光学厚度的增加而增加。我们还发现,对称特征的对比度与光学厚度的测量有关。此外,当模糊贡献被识别和去除时,特征结果给出了一个纯二阶散射观测,其可用于液滴尺寸反演。copy;2004美国光学学会
- 引言
从激光雷达技术的诞生开始,退偏测量一直被应用于区分液体或固体大气散射。手术原则是众所周知的,基于小均匀的液滴悬浮在空气中和球形均匀散射体不退偏辐射正好180°,而形状不规则的固体颗粒会产生显著退偏的情况。这项技术是由Schotland et al.、Sassen,、Pal 、Carswell,和 Platt.开拓发展,对于我们的知识,Carswell和Pal是第一个在1980年两极分化模式报告中提到在控制环境的云上的分布。他们在1985.年的大气云层中重复了这些观测,Rakovic和Kattawar在1998年对这些发现进行了一致的理论分析:一个由球形粒子的二阶散射的简单模型可以很好地再现观测到的模式。同时Roy et al.和Bissonnette et al.在多个场(MFOV)激光雷达显示的优势中利用多重散射的信息内容检索云微物理参数的水。到目前为止,MFOV的测量都是按不同的孔径顺序进行的,或者是在一个环形分段针探测器的帮助下进行的,或者是在全息记录的基础上进行的。最新进展在封闭的发展加剧了电荷耦合器件(ICCD)相对simple.的多重散射激光雷达测量光。虽然已经观察并解释了,相乘的激光雷达返回的方位依赖关系包含了可检索的云参数信息,例如光学厚度和液滴大小,但这还没有被利用。本文提出了一种用线性偏振光束穿透已知光学厚度的云的反散射光偏振模式的测量方法。对MFOV测量结果的测量是用一个有门的密集CCD摄像机记录下来的。在对称方位角和光学厚度的对比中建立了实验关系,此外我们表明,使用测量散射光在0°、90°对激光脉冲偏振的方向,我们可以推导出二阶贡献多次散射交叉极化测量模式。
图1. 激光雷达探测模块的原理图,包括两种传统的偏振通道和一种用ICCD相机测量交叉极化回报的通道:PMT,光电倍增管。
2.激光雷达系统及测量方法
MFOV激光雷达测量是在一个22米长的喷雾器室内进行的。两种传播系统被用于产生不同大小的水滴:分布的气动水头和MDG超级大 5000雾油发生器。在其他地方已经描述了气溶胶室设施、水滴和雾油云。在短时间内生成的水滴在10 - 80米直径的大小范围,附近的平均直径为20米,而油滴的亚微米直径͑对数正态分布和几何平均体积直径为0.8米,几何标准差为0.58米。气溶胶室位于距离激光雷达100米的地方。采用纵向透射计测量总光学厚度为2%。MFOV激光雷达测量是用100hz重复率Nd:YAG(激光͑Kigre,MDL 1732)主力͒封闭了CCD(相机同步͑ICCD DH-720-18u-03),输出激光的特点如下:2.5厘米直径,0.3mrad分歧͑͒总能量50%,线性极化纯度1500年25mJ大气中脉冲能量,脉冲宽度12 ns。
图1显示了检测设置。主光学元件包括一个直径为200毫米的离轴抛物面镜,焦距为760毫米。图像平面的位置是焦距和物体位置的函数,有必要根据云距离对图像平面位置进行调整。在传统的激光雷达偏振探测模块中,使用石英窗反射部分反射光线。
通过石英窗透射光被偏光体收集,并在ICCD上被重新收集;移除立方体极化器提供了总信号的测量。在图像平面上,一个带1%传输的传动装置比1.32mrad小,一个带传输的传动装置比1.32mrad大,当需要更大的动态范围时,它定位于图像平面。模糊由一个12.5毫米直径,0.5毫米厚BK7玻璃盘与1毫米直径反射率͑为99.0%͒中央点组成。除了主光学外,激光雷达系统还配备了全天候20厘米直径的潜望镜扫描器。这使我们可以将激光雷达指向任何方向。扫描仪由23厘米的窗口和三个平面30厘米直径的镜子组成设定在45°。整个系统的径向响应的特点是,在一个晴朗的天,在系统指向zenith.的时候,进行了平场测量。
我们使用ICCD相机来进行方位分辨MFOV测量。相机在-10°C冷却减少暗信号及其相关的散粒噪声。为了解决所记录的图像,微通道板增强器采用了由100 hz Nd:YAG激光器的Q开关激活的脉冲发生器。对于每一个测量事件,我们遵循一个程序,使我们能够优化相机的采集速度,降低噪音水平,尤其是读出噪声。首先,我们确定了在读取CCD之前需要对相机芯片进行求和的脉冲数。通常我们为最多20000项目标像素͑饱和度达到65535项͒确保足够的激光雷达返回矩阵相机的感光器和良好的线性响应。然后在获得激光雷达回程之前测量光的背景,在激光雷达测量的相同次数的情况下打开相机门。最后,从激光雷达返回的图像中减去背景图像。我们将这一过程重复了7个不同的范围,间隔3米,以研究激光雷达返回的演化过程,并深入到气溶胶腔。与ICCD范围视图的字段顺序,从而获得͑FOV瞬间。产生的采集速度取决于在读取CCD相机芯片之前所选择的脉冲数。通常这个数字在5到20之间变化,完成一个数据采集周期大约需要4.2秒。这个时间可以用一个分箱模式来减少。实际上,分箱的两个主要好处是提高了信噪比和提高帧率的能力,尽管这是以减少空间分辨率为代价的。这些测量通常在清晨进行,这样相对湿度就会比较高,风也比较温和。一个典型的测量序列如下:传统的激光雷达通道用来确定将时间延迟应用到ICCD相机上。室内的门关闭了,水滴或雾油的传播开始了。在播散结束后的30秒内,混合风扇被操作,以确保在室内有良好的同质性。前门被打开,ICCD相机每3米开始测量,从房间的0.5米开始,以18.5米的速度结束。后门被打开5秒,以便测量总光学厚度。在腔内的液滴浓度是均匀的,每一个ICCD测量的光学深度计算如下:
其中T是通过传输室和我穿透距离͑米内͒室。从0.1到3的光学厚度已经得到。
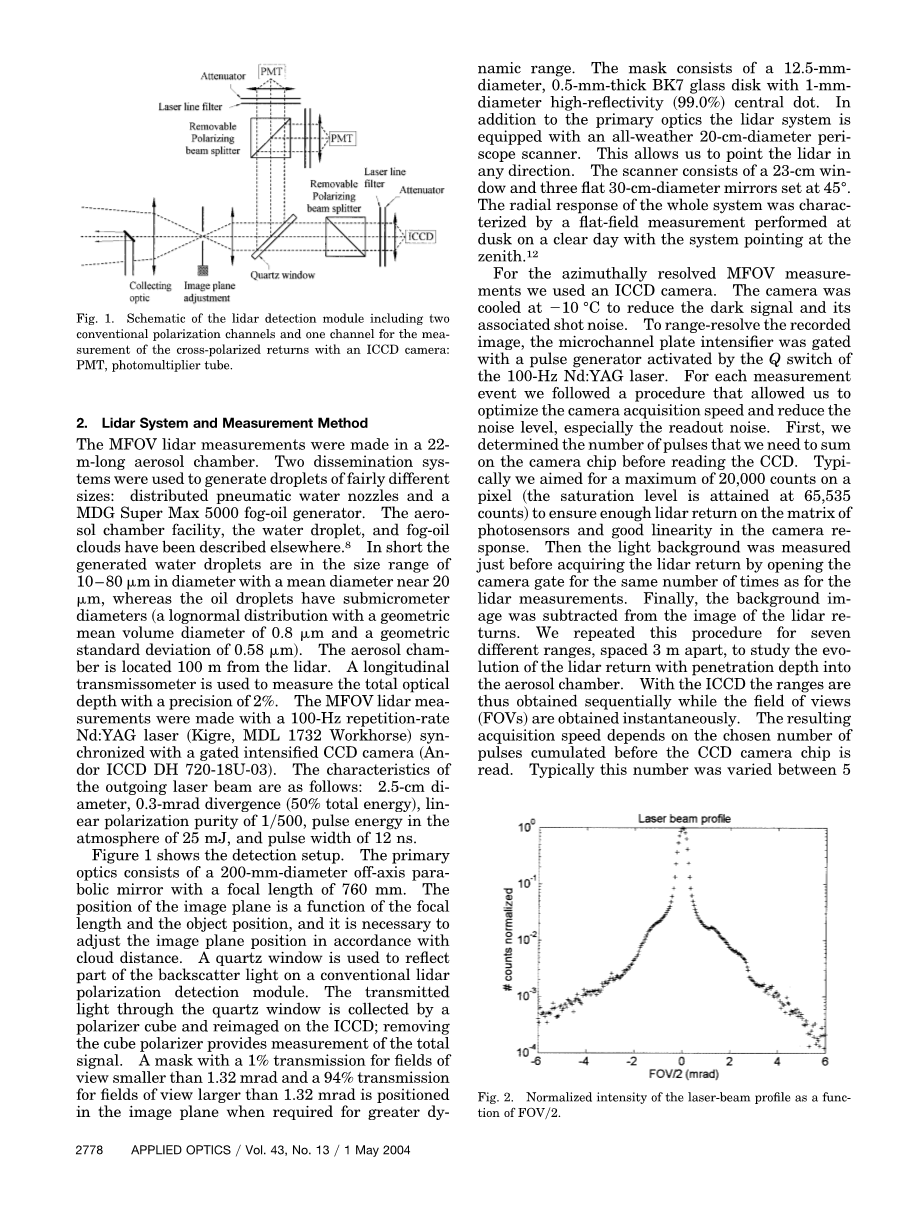
图2. 激光光束的归一化强度作为FOV / 2的函数。
图3. 从左面、左面、雾滴、右面、一滴水云上,距离交叉极化后向散射的图像,都被分散在一个22米长的房间里。门的深度为3米,云的距离为100米,云的穿透距离为:左、3.5、6.5、9.5米,右、6.5、9.5、12.5米。
图4. 图3所示模式的各种FOVs的方位依赖关系:符号、测量的像素计数;连续的曲线最适合。
图5. 对比度值、EQ(1)绘制与光学深度͑(a)FOV 2和4mrad͑(b)水和fog-oil滴。
3.测量
在进行这里的测量之前,我们将激光光束的轮廓描绘为在距离激光雷达200米的画布上的效果。图2显示了被记录的归一化强度作为FOV / 2的函数。为了实现图2,我们对每一列CCD的电荷进行了总结,并对结果进行了标准化。虽然50%的能量被包含在0.35mrad中,但仍有10%的能量超过了2mrad。激光光束的明显增宽主要是由于扫描仪光学元件的不完美、光学上的灰尘以及ICCD输入窗口内的反射。
图3显示了不同光学深度下测量的正交偏振激光雷达的彩色编码强度图像,fog-oil͑(左)和水滴͑(右)云。在此表示中,1个像素的径向距离对应于0.0476mrad,其强度通过ICCD芯片上的激光脉冲数进行归一化。图3中的图像是由Carswell和Pal所观察到的模式的清晰的复制,但是模式会随着光学深度的增加而变得模糊。
我们将对图3中图像的两个特定方面进行定量分析。首先,我们研究了方位(Ref.13)依赖正交极化返回给定FOV。图4显示了的函数关于FOV视场范围1.7-2.3,3.7-4.3和5.7-6.3mrad用名义平均值为2,4,6mrad。标绘的值是在10度以上的方位平均值。显示为最适合的连续曲线方程为因为͑和是适合每个实验数据集的参数(和)。根据第4节所讨论的多散射理论,对拟合参数的依赖和符号的预测。
拟合参数是固定的,使以下条件得到尊重:|拟合曲线()-实验数据()|/|实验数据()|lt;误差,误差允许值从0.1开始,如果需要,可以增加到0.3。典型值和的不确定性通常低于(错误容忍大约是0.1)2mrad小光学厚度。这一现象可以解释为理论蒙特卡罗反向散射正交偏振模式获得的Ref.13表明散射的浓度增加了模式是位于一个较小的激光的入射点附近。事实上,高阶散射事件的贡献给大的FOV造成了一些模糊。因此,为这些FOV找到一个很好的拟合曲线变得很困难。拟合过程中典型的不确定性也随散射体的大小而变化。为同一视场水滴的数据比雾油更容易找到一个拟合曲线,因为激光雷达的数据返回强度,这是高度相关的散射相位函数,是更高更大的粒子(水滴在这项研究)。我们使用参数和计算对比的观测模式,即,
(1)
对比度值是计算所有测量和标注在图5和光学厚度。图5中某些点的相对分散可能是由于在计算光学深度时所假设的,在气溶胶腔内粒子的传播并不是完全均匀的。
这一定是特别的油雾,因为这些液滴生成只有一开始的气溶胶室5000年目标超级马克斯fog-oil发生器,然后蔓延在受控的环境中通过一个强大的电风扇,吹空气很长(22米)穿孔塑料管而产生的水滴是分布式气动水喷嘴。与光学厚度的对比降低了准线性,如果我们认为拟合曲线上允许的误差大于10%,则与液滴大小和FOV(2和4mrad)几乎无关。与光学厚度的稳定对比度降低是由于高阶散射。注意,较大的FOV的泛化没有在图5(a)中显示,因为在拟合过程中典型的不确定性高于这些数据的0.3。我们认为误差的公差是如此之高,以至于在计算对比度时给出令人满意的结果是不精确的。粒子大小的非相关对比和光学深度之间的线性关系相比之下可以推广到大粒度范围,因为水滴的平均直径20米,而研究几何平均体积雾油更小直径(0.8米)。在第二种分析中,我们研究了交叉极化模式的FOV依赖,对给定的方位角进行了研究。图6给出了这个量绘制的函数从到为-5°到5°、20°到25°、42.5°到47.5°、65°到 70°和87.5°到92.5°的平均值来表示0°、22.5°、45°、67.5°、90°。我们观察好两侧对称45°指示好室内径向均匀性以及ICCD的校准。
图6. 绘制功能的视场相对正交极化换取窄方位角行业集中在0°、22.5°、45°、67.5°和90°讨论
4.讨论
第二、高阶散射事件对测量模式的贡献,在图7中进行了示意图。所有被记录的二阶散射贡献,在Bs的一个反向散射事件中共享一个共同的散射平面(假设一个无穷小的激光光束大小)。相比之下,散射顺序的贡献大于2也通过Bs,例如,图7中的和,都有不同的散射面。这解释了为什么高阶散射不会产生方位模式。在这方面,重要的是要记住,从固体靶中获得的激光束的图像显示,在大的FOV中有相当多的能量,这也会造成二阶方位角模式的混乱。Rakovic和Kattawar已经表明,二阶散射的径向(FOV)和方位依赖关系是
由:
(2)
其中为激光束轴的径向距离,可以很容易地转化为视场; 是反向散射系数;和是两个Mueller矩阵的乘积的表达式,它们结合了两个散射事件的所有可能的散射角。使用公式(2)在对比的定义中公式(1)]我们发现
(3)
换句话说二阶散射交叉极化的对比是恒定的,且与粒子大小和FOV无关。这一致的在图3和图4的实验观察中,除了高阶散射的模糊效应外,公式(2)显示的是和应该等于0。来自散射的指令高于2。假设统一强度分散超过,我们近似散射的贡献大于2的平均的图像强度/窄方位角行业集中在0°、90°、180°、270°。我们计算每个FOV的不同值,因为它是依赖于FOV的。从完整图像中减去这个量,我们得到一个接近二阶散射模式的结果。我们对所有的测量进行了计算,发现在FOVs(2,4,和6mrad)中雾滴油和水滴的平均对比度为0.950.07,这足够接近1的理论值。这种差异可能来自于一个小而不可忽略的离轴激光束能量的量(图2)。对于大于2的散射点的贡献的均匀强度的近似也必然导致一些误差。事实上,这些散射顺序可以显示一些弱的方位角模式。然而,在多散射轨迹中,对方位角模式的主要贡献来自近双散射轨迹,光有一个反向散射和许多近正散射。注意,从图4中的拟合曲线中减去,与理论公式(2)的角度相依相匹配,可以得出正好1的对比。因此,我们得出的结论是,从记录的完全交叉极化返回的二阶散射交叉极化的返回中,得到较好的准确性是相对容易的。最后,将该模式与方位角相结合,得到了二阶散射的与FOV相关的交叉极化回归。这种转换的好处在于后一种数量是可用于分析建模的,因此可以利用可管理的检索技术。在图8中,我们比较了图2所示的图2所示的第二阶返回值与完整的返回值。
这些数据与Roy和Bissonnette报告的MFOV测量结果很相似。到目前为止,我们已经限制我们的讨论球形粒子的背散射光在180°不是退偏的。同样的测量方法也适用于1玻璃珠和非球面颗粒,如黄铜薄片(直径0.1,直径6),碳纤维(直径8,长3毫米),以及大型(90)聚合物微球和碳酸钙涂层。三种非球面的粒子都没有观测到方位角。在1玻璃珠的情况下,已经观察
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21930],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 气候系统模式BCC_CSM1.1对东亚高空对流层急流和相关瞬变涡流活动的模拟外文翻译资料
- 基于FAO Penman-Monteith方程与每日天气预报信息估算参考蒸散量研究外文翻译资料
- 稳定非饱和渗流条件下的无限大边坡稳定性外文翻译资料
- CMIP5模式下中国极端降水指数。第二部分:概率投影外文翻译资料
- 2013年2月8-9日东北部地区暴风雪过程的偏振雷达和微物理过程研究外文翻译资料
- 华南前汛期香港中尺度暴雨的研究外文翻译资料
- 边界层对极地春季臭氧损耗现象起止的影响外文翻译资料
- 一种利用神经网络从具有高光谱分辨率的红外光谱 反演温度信息的方法外文翻译资料
- 1961 ~ 2004年青藏高原夏季降水的时空分布外文翻译资料
- 中国中东部地区冬季雾——霾日的年际变化及其与东亚冬季风的关系外文翻译资料

