
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
月球轨道激光测高仪测量月球表面坡度和粗糙度
由月球勘测轨道飞行器(Lunar Reconnaissance Orbiter)携带的月球轨道飞行器激光高度计获得新的全球高程数据,可以以前所未有的规模和分辨率对月球表面粗糙度特性进行量化。在基线alpha; = 17m ~ alpha; = 2.7 km的范围内,我们用一系列参数来绘制月球表面粗糙度:中值绝对斜率,包括方向(沿轨)和双向(二维),中值微分斜率和Hurst指数。我们发现,月球高地和月海平原表现出截然不同的粗糙度特性,月海和高地内部的变化更为微妙。大多数表面都表现出类似分形的行为,在给定的基线范围内具有单一或两种不同的Hurst指数,当存在过渡时,它通常发生在1公里基线附近,表明竞争表面过程具有显著的特征空间尺度。Hurst指数在月球高地内部较高,中值为0.95,在玛丽亚内部较低(中值为0.76 )。中值微分斜率是区分粗糙单元的有力工具,有助于刻画大盆地特别是东方地区的喷出物以及年轻的哥白尼陨石坑周围的射线系统。此外,它还能对月海表面的表面粗糙度随年龄的演变进行定量探索。
- 介绍
地表坡度和坡度分布作为地表演化过程随地质时间变化的特征,从形成机制和改造机制两方面为行星表面的形态历史提供了重要线索。此外,基于粗糙度及其尺度相关性的地表区域比较是解释地质和地形单元之间关系及其起源的有力工具,已成功应用于包括地球在内的各种行星体[如:Morris et al., 2008;Neumann and Forsyth, 1995; Smith and Jordan, 1988],火星[如:Aharonson et al., 2001; Orosei et al., 2003; Kreslavsky and Head, 2000]和金星[Sharpton and Head,1985]。从阿波罗时代到现在[[Daniels, 1963; Moore and Tyler, 1973; Yokota et al., 2008],人们对月球表面粗糙度的研究已经经历了几十年的时间,但迄今为止还没有能够在高分辨率和多尺度上全面研究月球表面的坡度和坡度分布。
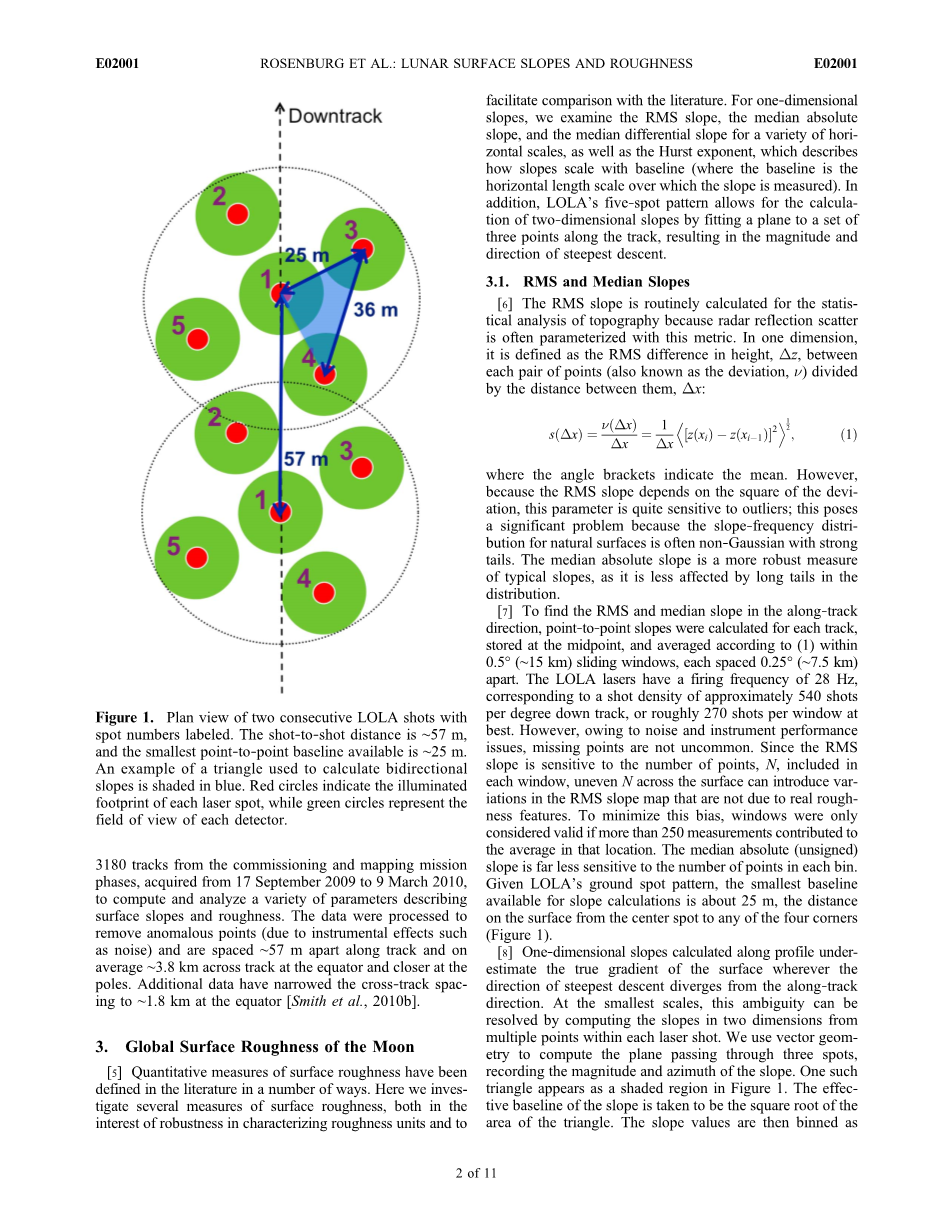
图1:连续两个LOLA镜头的平面视图,标有点号。镜头间距离为57 m,最小的点到点基线为25 m。用于计算双向斜率的三角形的一个例子是蓝色的。红色圆表示每个激光光斑的照明足迹,绿色圆表示每个探测器的视场。
月球探测器激光高度计( LOLA )于2009年6月下旬在月球侦察轨道器( LRO )成功入轨后开始收集数据[Smith et al., 2010a; Zuber et al., 2010]。在地面轨道结构中,由5个照亮点组成的表面以十字形排列(图1 ),LOLA允许在多个基线上确定坡度,不论是在每个激光镜头内的点对之间,还是在镜头之间。LOLA测量的较高的垂直精度( 10厘米)、精密度( ~1米)和高密度( ~57米单轨道空间),为定量表征月球表面与当前和过去的表面过程以及未来登月地点的选择提供了前所未有的可能。对比来看,火星轨道激光测高仪的垂直精度为1.5 m,空间精度为100 m (含指向误差),沿轨间距为300 m[Smith et al., 2001]。
- 地形数据
LRO维持一个近圆形的50公里极地轨道,每个月扫描月球的所有经度。我们使用2009年9月17日至2010年3月9日在调试和测绘任务阶段获得的3180条轨道数据,计算和分析各种描述地表坡度和粗糙度的参数。对数据进行处理,剔除异常点(由于噪声等仪器效应),沿轨道间隔57 m,赤道平均横过轨道3.8 km,两极距离较近。另外的数据使得赤道的横道间距缩小到1.8 km[Smith et al., 2010b]。
- 月球的全球表面粗糙度
表面粗糙度的定量测度在文献中已有多种定义。在这里,我们研究了表面粗糙度的几种度量方法,既有利于表征粗糙度单位的稳健性,也便于与文献进行比较。对于一维坡度,我们考察了各种水平尺度的均方根坡度、中值绝对坡度和中值微分坡度,以及Hurst指数,这些指数描述了坡度尺度如何与基线(其中基线是测量坡度的水平长度尺度)。此外,LOLA的五点模式允许通过将一个平面拟合成一组沿轨道的三点模式来计算二维坡度,从而得到最陡下降的幅度和方向。
-
- RMS 和中值斜率
RMS斜率通常用于地形的统计分析,因为雷达反射散射体往往是用这个度量参数化的。在一维情况下,定义为每对点之间的高度均方根差Delta;z (也称偏差,n )除以它们之间的距离,Delta;x:
其中角括号表示均值。然而,由于RMS斜率依赖于偏差的平方,该参数对离群点非常敏感,这就造成了一个重要的问题,因为自然表面的斜率-频率分布往往是非高斯的强尾。中值绝对斜率是典型斜率的一个较为稳健的度量,因为它在分布上受长尾影响较小。
为了得到沿轨道方向的均方根值( RMS )和中值斜率( median slope ),对每条轨道计算点对点斜率,存放在中点处,并按( 1 )式在0.5 ° ( ~15 km )滑动窗口内,每条轨道间距0.25 ° ( ~7.5 km )取平均值。LOLA激光器的发射频率为28 Hz,对应的发射密度约为每度下行轨道540发,或至多每窗口约270发。然而,由于噪音和仪器性能问题,失踪点并不少见。由于RMS斜率对点数很敏感,每个窗口包含的N,表面的不均匀N会导致RMS斜率图的变化,而不是由于真实的粗糙度特征。为了尽量减少这种偏差,只有当超过250个测量值贡献该位置的平均值时,窗口才被认为有效。绝对中值 (无信号)坡度对每个bin的点数远不敏感。在LOLA的地面点模式下,边坡计算的最小基线约为25 m,即地表中心点到四角任意一点的距离(图一)。
沿剖面计算的一维斜率低估了地表的真实梯度,无论最陡下降方向偏离沿轨道方向。在最小尺度上,这种模糊可以通过计算每个激光照片内多个点的二维斜率来解决。
沿剖面计算的一维坡度低估了最陡下降方向与沿轨道方向的真实坡度。在最小尺度上,这种模糊可以通过计算每个激光照片内多个点的二维斜率来解决。我们利用矢量几何计算经过3个点的平面,记录坡度的大小和方位。一个这样的三角形在图1中显示为阴影区域。取坡度的有效基线为三角形面积的平方根。然后将斜率值按前面的方式进行二值化,报告的0.5°重叠窗口的中值间隔为0.25°。
图2所示为17米尺度的中值双向坡度图。注意,结果以度单位报告,统计量以梯度单位( m / m )计算,中值斜率le;3°的光滑区域容易与高地区分,而最陡的中值斜率(ge;10° )则出现在火山口壁面和主要撞击盆地周围的块状弹射毛毯和年轻的射线火山口内。东方式撞击盆地的多环结构在这一尺度的地表斜坡上清晰可见,连同从连续喷出沉积中放射状出现的由地形表达的次级火山口链。南极-艾特肯盆地的地板表现为一个缓坡区域,对盆地地面取样(不包括泥灰岩沉积,这将有助于它们本身的粗糙度特征)的中值坡度为5.8°,尽管分布重叠,仍比高地的中值7.5°低近2°(详见表1)。在近月海平原内,斜坡的细微变化,特别是在Imbrium盆地、Serenetatis盆地和Crisium盆地内,显示出大规模的流锋和褶皱脊(图3 )。斜坡在两个主要的高地之间迅速过渡,并在其边界处形成泥质粗糙单元,其中泥质玄武岩常常发生倾斜和变形[例如,Solomon and Head,1980 ],只是部分地包围了周围较粗糙的地形。
图2:在17 m有效基线处中值双向斜率图。坡度是通过在三个高程数据点之间拟合一个平面来计算的。据报道,中坡为0.5°窗口间隔相距0.25°。( a )北极,45°N,( b )南极,45°S,均为赤平投影。( c ) 70°S ~ 70°N纬度的柱面等距投影。
对于各向同性地形,点对点和双向坡度分布之间存在一定的关系:给定一维坡度分布,通过统计修正可以得到二维坡度的等效分布。一维斜率F ( p )和二维斜率F ( s )的概率分布函数与之相关:
在实际应用中,这个积分方程可以被离散化和反演。图4是我们测量的一维和二维边坡的全局比较以及调整后的点到点的边坡直方图。我们发现实测双向斜率与一维斜率分布预测的双向斜率有较好的一致性,但二维斜率比一维斜率分布预测的双向斜率稍陡,一般为25 %。我们可以对造成这种差异的两个因素进行约束。当采用高长径比的三角形进行平面拟合时,我们的斜率测量会出现各向异性。LRO的轨道构型为这些三角形的长轴创造了一个优选的方向,由于较长基线时斜率一般较浅,因此方位分布偏向垂直于下轨道方向。为了尽量减少这种影响,我们只使用包含低长宽比的三角形,使用点1,3和4。虽然仍存在一些各向异性,但这种考虑将契合提高了近2倍。导致这种差异的部分原因也是由于仪器限制使得在相似基线上比较斜率变得困难。点对点斜率的最小基线( ~25 m )大于我们所选择三角形的有效基线( ~17 m )长度。因此,双向斜率有大于一维斜率的趋势,这种差异的一个组成部分仅仅是由于基线不匹配造成的。通过使用局部Hurst指数(在3.3节中定义)将坡度分布缩放到共同的水平基线上,可以得到稍好的一致性。然而,这需要额外的假设,改进并不大。
图3:中间双向坡度,如图2所示,采用颜色拉伸设计,强调月球玛丽亚内部坡度的细微变化。大规模的水流锋面和褶皱脊等构造特征出现在比周围平原高的连续斜坡区域,在Imbrium、Crisium和Serenetatis盆地内最为明显。
表1:月球主要地理区域表面粗糙度特性的估计统计表
图4:月球的全球坡度直方图。红色(虚线)表示25 m基线处实测点对点坡度分布。该分布采用Aharonson和Schorghofer [ 2006 ]的方法重新计算到绿色(固体)线上,从一维斜率直方图预测双向斜率。在17 m尺度上测量的双向坡度如蓝色(点划线)所示。对所有分布进行归一化处理,使概率密度函数的积分等于1。假设地形是各向同性的,其馀的差异是由于用于测量二维斜坡的三角形的几何形状以及每种情况下测量斜坡的尺度不匹配造成的。这两种效应都受到LRO的轨道构型和仪器局限性的制约。
-
- 中值斜率差异
中值微分斜率是Kreslavsky和Head [ 2000 ]提出的一种衡量方法,用来消除小尺度和大尺度对表面粗糙度的贡献。对于感兴趣的基线L,它通过在给定基线的两倍处减去点到点的斜率来分离L阶上的粗糙度特征:
由此得到的值s是对较长波长特征在一定尺度上斜率的度量。
与RMS和中值双向斜率一样,中值微分斜率是在相距0.25°的0.5°窗口内计算的,只保留测量值大于250的窗口。遵循Kreslavsky和Head [ 2000 ]的工作,将两个不同基线计算的斜率相减,根据( 3 )式计算给定基线的差分斜率。实际上,这包括计算每个斜坡中点沿轨道长度的位置,并将较长基线的斜坡中点插值到较小基线的斜坡剖面所占据的点,以在正确的位置完成减法。该方法保证了两个坡面剖面始终正确对齐,从而避免了差坡计算值的误差。此过程与3.3节描述的、图6所示的去趋势过程相同,但基线的比率始终为2。
图5:中差斜率合成色图。根据式( 2 )计算了三个不同基线上的差异斜率,在考虑的最小尺度上,蓝色通道对应粗糙度,即一个炮间距,即57m。绿色表示220 m基线处的粗糙度,红色表示560 m基线处的粗糙度。地图投影与图2相同。
以这种方式计算了所有基线的差异斜率,从一个镜头间距( ~57米)到25个镜头间距( ~1.4公里)。计算时只考虑单个激光光斑的剖面,这样可以沿同一方向计算多个基线上的斜率。图5给出了月球表面在三种不同尺度下的复合色图,其中红道的粗糙度为- 560m ( 10镜头间距),绿道的粗糙度为- 220m ( 4镜头间距),蓝道的粗糙度为- 57m ( 1镜头间距)。地表粗糙度性质的变化是明显的和实质性的,对几种地形类型表现出耐人寻味的特征。月球玛丽亚在最小尺度上最粗糙,在大尺度上更平滑,使得它们在合成图像中很容易被它们的蓝色调所区分。通过与图5的对比可以看出,不同年龄的水流具有不同的糙率特征,最年轻的水流仅在最小尺度上表现出糙率特征,而在较大尺度上,随着年龄的增长,糙率逐渐增大。在最小尺度下,粗糙度随年龄保持近似恒定,潜在表明小尺度上的饱和发生在较短时间尺度上。在综合地图中,这些年龄变化对应着颜色从深蓝色到蓝绿色的转变,主要盆地(尤其是东方地区,属于老盆地)周围的喷出物在最长的尺度上最粗糙,导致这些区域出现橙色或红色。年轻的哥白尼时代的陨石坑看起来是白色的,因为它们在所有的通道都是明亮的,是月球上修饰最少的特征,它们在所有的尺度都是粗糙的。此外,与这些陨石坑有关的射线系统,在反照率图中如此明显,但不明显地表示为地形起伏,在中尺度最粗糙,可能反映出陨石坑链和团簇,这些团簇经常填充陨石坑射线[例如,Oberbeck,1975,Pieters等人,1985]。因此,它们清晰地表现为围绕每个特征的星状黄色到橙色晕(图6 )。在其他方面,更微妙的变化,与单一的地质特征没有明显的关系,发生在许多地表。纬度为30 ° S ~ 60 ° N,经度为160 ° E ~ 240 ° E的区域,代表月球高地不间断的大范围延伸,呈现相对明亮的斑驳状外观,与许多不同尺度上饱含火山口的旧地表一致。南极-艾特肯盆地除叠加火山口内的野兔斑块外,其馀区域比周围略红。
图6:以19°E和22.4°N为中心的月球远侧火山口Jackson及其射线系统,如( a ) 750 nm Cle
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[257591],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- GIS矢量地图的鲁棒水印方案外文翻译资料
- 中国相似地理位置发达地区房价影响因素的差异——以西安高新区和沣渭新区为例外文翻译资料
- 集成数据在城市土地利用变化时空动态监测的应用——以印度金奈都市为例外文翻译资料
- 全球地表水及其长期变化的高分辨率制图外文翻译资料
- 造成沿海大型城市内涝灾害的主要因素识别——以中国广州为例外文翻译资料
- 基于SFPHD框架的中国快速城市化地区城市生态系统健康综合评价方法外文翻译资料
- 基于绿地演变的未来城市地表热岛强度的多情景模拟预测外文翻译资料
- 中国大陆272个城市地面和冠层城市热岛强度的长期趋势外文翻译资料
- 与孟加拉湾热带气旋有关的中国低纬度高原远距离降雨事件外文翻译资料
- 新丰江水库流域GPM IMERG降水产品评价及水文效用研究外文翻译资料

