
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
利用GPS导出的综合水汽雾霾的特征分析
_____________________________________________
Jaewon Lee,a* Jong-Uk Park,bJungho Cho,bJeongho Baekb和Hyung Woo Kimc
a韩国大田科技大学天文学和空间科学系
b韩国大田韩国天文学和空间科学研究所
c第73天气集团,大韩民国空军,大田,韩国
_____________________________________________
摘要:为了确定GPS衍生的综合水汽(IWV)作为雾探测器的合理性,在时域中研究了GPS IWV与雾期气象观测之间的关系。在这项研究中,假设雾是基于大量水连续性模型中的非降水暖云的水蒸气和云水的简单函数,并且在雾期间,雾层上的大气是水平均匀的。
选择了浓雾的情况,人眼观察到的能见度(#39;synop#39;)lt;1 km,在同一GPS站点进行定期观测。初步结果表明,GPS IWV可以检测雾的微物理和动态过程,如水蒸气转化为云水,水汽流入GPS观测点。此外,可能会发现GPS IWV不断地和定量地反映饱和后的雾状态。
为了减轻时间分辨率的限制和“synop”可见性数据的不准确性,GPS接收器和能见度计同时在同一地点操作。该实验明确地揭示了典型的辐射雾比其他类型的雾更适合用于GPS IWV的检测。
基于这些结果,建议GPS IWV可以被认为是检测雾过程和改善雾可预测性的补充技术。版权所有2010皇家气象学会
关键词雾;GPS IWV;能见度;水蒸气;云水
介绍
与强降雨和热带风暴相比,雾对日常生活的影响较小。然而,随着运输系统的发展,包括海上和空中运输系统,浓雾显现能见度差,天花板低可能具有潜在危险(Bergot et al。,2005)。特别是机场,港口和高速公路周围的雾气会严重威胁公共安全。Leigh(1995)指出,由于这些原因,准确的分析和雾预测技术具有很高的经济价值。
雾是与地球表面附近的水蒸气凝结水滴直接相关的现象。随着雾的观测和分析技术的发展,已经开展了许多关于雾的研究。统计方法(Leipper,1995)和雾的水凝物分析(Gul-tepe等,2006)是一些例子。在其他研究中,遥感数据,如气象卫星,雷达(Nowak等,2008),以及热力学,物理学,辐射和云微物理学在数值天
气预报(NWP)中的敏感性分析模型(Pagowski等,2004)用于改进雾预测。然而,雾的分析和预测仍然具有科学限制,因为包括水蒸气在内的水凝物的分布在空间和时间上变化很大(Bendix等,2005)。
最近,全球定位系统(GPS)的使用已经扩展到许多领域。其中,使用GPS通过GPS卫星和接收器之间大气的信号延迟的GPS气象学是GPS最激动人心的应用之一(Anthes等,2008; Jin等,2008)。特别是,GPS观测的综合水汽(IWV)已用于气候学和过去十年的NWP模型(Smith等,2007)。
在这项研究中,利用在雾的形成,演化和消散过程中从大气中回收的GPS IWV的特征,采用了一种新的方法来检测雾的过程。然而,由于GPS信号通过雾层的延迟,不可能直接检测液相中的云水与GPS IWV的雾相关:与液体相关的延迟比通过水蒸汽的延迟短得多。气体(Solheim等,1999)。因此,假设需要大量水连续模型中的非降水暖云的特定条件来观察雾GPS,仅关注水蒸气和云水之间的相变过程。
为了分析GPS IWV与能见度之间的关系,2007年和2008年在韩国气象局(KMA)的气象观测站(Mokpo,Seoul,Sokcho)选择了浓雾案例。
此外,减少#39;synop#39;可见性的限制时域,GPS IWV进行了定量比较来自能见度计的数据,包括最近在Gyeryong直升机停机坪进行的其他定期观测2008年春季。
这些分析表明GPS IWV来自信号通过雾层的延迟可以描述雾过程中水凝物的相变,并且IWV在GPS站点上的变化代表了冷凝/蒸发和来自其他地方的水蒸气的流入。
雾形成的物理和动力过程
云物理在描述过程中至关重要雾形成。存在大气中的水物质如水蒸气,云液态水,细雨,雨水,云冰,雪,霰和冰雹(Houze,1993)。在这项研究中,雾被定义为大量水连续性模型中的非降水暖云,并且认为雾的水物质仅存在于水蒸气和云水中。水蒸气和云水之间的关系可以描述为水连续性方程(1)和(2):
其中qt (总含水量)是具有质量守恒定律的保守含量。等式(1)是具有qv (水蒸气含量)和qc (云水含量)之和的欧拉方程。它可以以偏微分形式重写为等式(2)。等式(2)中的中心成员的第一项描述了水蒸气的局部变化,第二项描述了平流,最后一项显示了湍流通量发散。当缩合率(C)变为负值时,意味着蒸发(E)占主导地位。相反,当它变为阳性时,意味着凝结是主要的(Fitzjarrald和Lala,1989)。
因为总水含量必须在等式(1)中保存,所以水蒸气的增加等于蒸发过程中云水的减少。冷凝过程正好相反。然而,云水和水蒸气之间的这种变化并不直接暗示云和雾的形成和消散。为了隐含地解释雾的过程,每个术语必须被独立地视为本地从等式(2)的总微分形式改变,平流和湍流项。
另一方面,等式(3)是从大气的表面到顶部的等式(2)的积分形式,以表示与雾有关的水蒸气的相变:
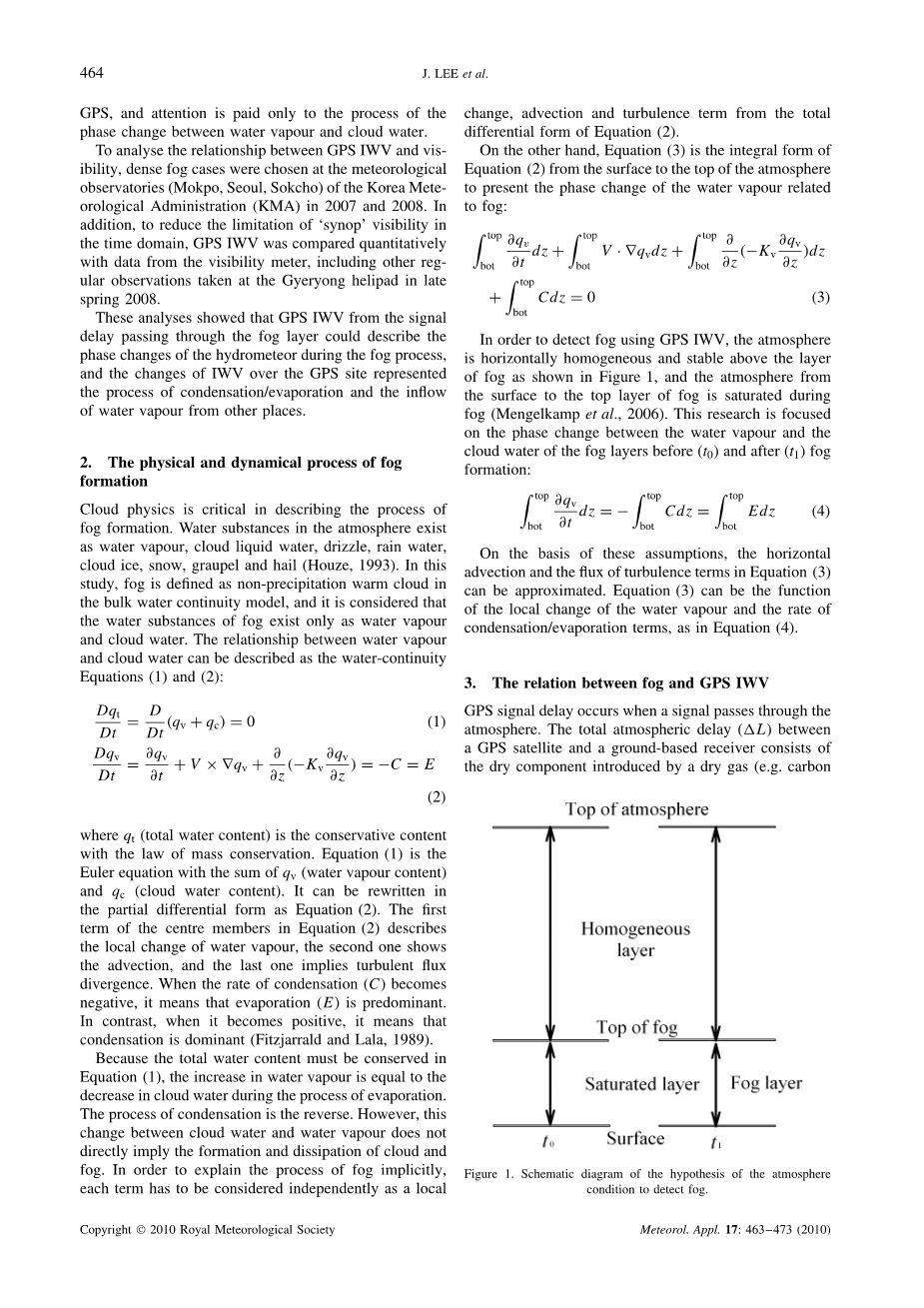
为了使用GPS IWV检测雾,大气在雾层上方水平均匀且稳定,如图1所示,雾中从雾面到顶层的大气饱和(Mengelkamp等,2006) )。本研究的重点是雾层(t0)和之后(t1)雾形成过程中雾层的水蒸气和云水之间的相变:
雾与GPS IWV之间的关系
基于这些假设,可以近似等式(3)中的水平平流和湍流项的通量。等式(3)可以是水蒸气的局部变化和冷凝/蒸发项的函数,如等式(4)所示。
当信号通过大气时发生GPS信号延迟。总大气延迟(OL)之间GPS卫星和地面接收器由由干燥气体(例如碳)引入的干燥组分二氧化碳,氮气)和湿成分引入
图1.检测雾的大气条件假设示意图。 图2.在韩国(首尔,束草,木浦)和鸡龙直升机停机坪提供定期观测数据的GPS站点的位置。
通过大气中的水蒸气分布。它可以通过压力(p),水蒸气压力(ew)和温度(T)的函数来描述,如公式(5)所示,其中p和ew 以百帕为单位给出,T在凯尔文(Bevis et al., 1992):
等式(5)右边的第一项是倾斜流体静力延迟,第二项是倾斜湿式延迟。倾斜延迟使用映射函数转换为天顶延迟。天顶静水延迟可以在1毫米内预测,表面压力和温度基于流体静力平衡的假设(Elgered,1993)。然而,天顶湿延迟(ZWD)随着大气中水蒸气的分布而变化很大(Bevis等,1994),并且与公式(6)中的GPS IWV有关:
其中rho;是大气中液态水的密度和
其中Rv 是水蒸气的理想气体常数,Tm 是来自Tm 0.907Ts的加权平均温度[K]16.5,Ts 是表面温度[ K](Ha et al., 2006)。
最初,IWV是从表面到大气顶部积分的水汽含量的值,如公式(7)所示:
等式(8)是等式(7)的转换形式,其描述了雾前后IWV的变化率。最后,IWV率与蒸发率之间的关系可以如等式(9)结合等式(4)定义过时/冷凝。
利用GPS IWV分析雾
图2显示了Mokpo,Seoul和Sokcho GPS站点的位置,这些站点是由于GPS接收器和常规KMA天文台中的其他气象仪器的共址而选择的。观测数据是相对湿度,温度,风,“synop”能见度和GPS原始测量值。76例中2007年和2008年能见度lt;1 km,降水13例,无GPS数据11例被排除在外。通过对气象进行比较,选择了52个雾箱进行分析数据和GPS IWV。
首先,分析所选雾箱的天气背景,以检查雾的发生情况。结果确定大多数是大气压案件的条件稳定分层。这些条件表明,在雾的形成过程中,水蒸气和云水被限制与干燥空气混合,这影响了雾的强度和持续时间(Welch等,1986)。然后试图检测水的变化雾层内的蒸汽含量,并使用GPS分析雾的物理和动力学特征WV。通过对GPS IWV模式的分析和所选病例的气象观测,52个选定的雾状病例按辐射分类,平流和混合雾。使用GPS IWV检测和分类雾的过程如图3所示。在辐射雾的情况下[选择的雾箱中最大部分(27例)],凝结的影响比影响的影响更大。雾形成过程中的水平平流和湍流通量。通过在等式(3)中形成雾期间GPS IWV的减小,可以推导出水蒸气向凝结的云水转化。相比之下,六个平流雾情况的平流效应比凝结更具优势。由于水蒸气与云水含量一起流入GPS站点,这些情况通过GPS IWV的增加来分类。不包括辐射和平流雾情况,19个雾箱是“混合雾”。这被确定为受等式(3)的所有项影响的类型,并且难以解释所有这些只有GPS IWV的过程。
图3.使用GPS IWV检测和分类雾的示意图。
-
- 分类雾分析
GPS IWV和雾之间的定量关系,使用GPS IWV的时间序列,混合比和24小时内的可见性数据(包括雾)分析每个分类雾和无雾情况,如图所示图4.这里,当所有雾箱的可见度最小时,设置参考时间(0 h)。混合比是来自温度,露点温度和表面压力的气象观测值的计算值(Bolton,1980)。混合比表示表面大气中的水蒸气,并与雾中的GPS IWV进行比较。
图4(a)显示了27个辐射雾情况随时间的平均能见度,混合比和GPS IWV。能见度的变化是所有雾类型中最大的。混合比的时间序列类似于pat-雾前后的能见度(-6至 6 h)。当能见度变差时混合比率降低,而当能见度变得更好时混合比率增加混合比和可见度之间的相关系数是0.804。
与雾前后的水蒸气定量相比,它是一个很好的指标,因为它可以检测到水面附近的云水相变。考虑到这项研究的假设,GPS IWV也代表了雾期间水蒸气的状况。GPS IWV具有与混合比的相关系数(0.932)。GPS IWV与能见度之间的关系具有高相关性(0.730)。在雾形成之前,混合比和GPS IWV都比雾期更大。这意味着混合比和GPS IWV在雾持续时间之前反映GPS站点上的潮湿状况。
图4(b)是六个平流雾情况的平均能见度,混合比和GPS IWV的时间序列。与辐射雾情况相比,能见度变化相对较小,但混合比和GPS IWV的变化很大,因为等式(3)的平流项大于辐射项(Xu和Dong,1994)。混合比和GPS IWV的值是最大的,因为本研究中的所有平流雾情况都发生在湿度相对较高(6月和7月)时。当能见度变差时(6到0小时),混合比增加一点(0.35克公斤minus;1)上半场(6到3小时)然后相对变化(3到0小时)。这意味着混合比可以在雾前仅在表面上检测水蒸气的平流。然而,GPS IWV不断增加,因为它可以检测所有雾层的水蒸气。因此,确认GPS IWV可以表示GPS站点上的水蒸气的变化。GPS IVW的最小可见时间和峰值时间表现出1小时的时间延迟。可以推断,平流雾消散的主要原因不是雾流向其他区域,而是云水转化为水蒸气。
minus;
minus;
minus; minus;
图4(c)显示了混合雾箱的平均能见度,混合比和GPS IWV。能见度的模式类似于辐射雾:然而,变化较小。混合比模式也类似于雾形成前后的辐射雾情况(6到0小时),但GPS IWV模式是不同的。在雾期间,GPS IWV的变化显示出比辐射雾更大的变化。混合雾情况包括其他天气现象,例如复杂的云层对GPS信号更敏感:因此,由此产生的减少量的GPS IWV难以直接链接到雾的形成的凝结效应。
图4(d)显示了GPS IWV的平均分布和无雾条件下的混合比。无雾的参考时间由52个雾箱的最小能见度的平均时间调节,并且约为2122 UTC(0622小时LST)。混合比和GPS IWV的值和变化最小。两者之间的相关性很高(0.850)。混合比和GPS IWV在当地时间凌晨(0小时)和下午(9小时)最大值最小。混合比和GPS IWV的日变化小于其他雾情况。在无雾情况下,暗示水蒸气的值和日变化不大。
将所选雾情与无雾情况进行比较表明,混合比和GPS IWV的值和变化在每种雾型中都表现出显着的特征。通过对总时间序列的分析,GPS IWV的最大值显示为平流雾情况,最小值是无雾情况。混合比也类似。当仅在雾形成之前和之后(6至0小时)考虑时,辐射雾情况的混合比的变化是最大的。因为混合比代表附近的水蒸气在辐射雾凝结过程中的表面,在平流雾和混合雾的情况下,混合比的变化没有特定的信号,因为方程(3)的凝结和平流项往往相互抵消。然而,GPS IWV显示了辐射雾形成前后的变化,以及平流雾的流入,因为GPS IWV可以反映整个大气的状况;雾的类型可以用GPS IWV的变化模式分类。可以推断,GPS IWV的增加意味着平流效应的优势,并且GPS IWV的减小意味着在雾期间凝结效应优于GPS站点。
通过分析选定的雾和无雾通过GPS IWV定量检测水蒸气状态的可能性可以确认雾,并通过GPS IWV变化的模式对雾的类型进行分类。然而,仍然难以分析受等式(3)的复杂项影响的混合雾情况,因为GPS IWV无法将每个效应与总雾过程分开。因此,分析的重点是辐射雾和平流雾的情况。
图4. 1小时
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[431434],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- GIS矢量地图的鲁棒水印方案外文翻译资料
- 中国相似地理位置发达地区房价影响因素的差异——以西安高新区和沣渭新区为例外文翻译资料
- 集成数据在城市土地利用变化时空动态监测的应用——以印度金奈都市为例外文翻译资料
- 全球地表水及其长期变化的高分辨率制图外文翻译资料
- 造成沿海大型城市内涝灾害的主要因素识别——以中国广州为例外文翻译资料
- 基于SFPHD框架的中国快速城市化地区城市生态系统健康综合评价方法外文翻译资料
- 基于绿地演变的未来城市地表热岛强度的多情景模拟预测外文翻译资料
- 中国大陆272个城市地面和冠层城市热岛强度的长期趋势外文翻译资料
- 与孟加拉湾热带气旋有关的中国低纬度高原远距离降雨事件外文翻译资料
- 新丰江水库流域GPM IMERG降水产品评价及水文效用研究外文翻译资料

