英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
海洋工程
国际海事中船舶性能的评价
使用船上测量系统-在国际航行中散装货船运输的情况
a b s t r a c t :目前的全球社会比以往任何时候都更加迫切需要发展一个安全和高效的海上运输系统。 特别的推动因素是原油价格的急剧上涨,这要求航运公司尽量减少其船舶的燃料消耗。 此外,国际海事组织发布的能源效率设计指数限制了二氧化碳的排放。 天气预报服务对航运公司已变得更加重要。 然而,这些服务用于天气预报和船舶速度损失现象等目的的数值模型存在精度缺陷。 此外,由于船舶运动以及导航、发动机和天气参数方面的连续数据积累不足,阻碍了气象模型的开发。 这项研究所用的数据是一年多来从一艘20000吨级散货船在世界各地的航行中收集的。 通过对船舶运动频率响应、天气和海洋频率响应的实验数据和数值模拟,建立了船舶运动、速度损失和波浪条件的一些新关系。
关键词:海上运输、海洋波浪、船上测量
1、导言
对可持续社会的追求使发展安全和高效的海上运输比以往任何时候都更加重要。 几十年来,这一课题一直在海上运输和海军建筑领域进行研究( Newman, 1977; Faltinsen, 1990)。 研究方法有两种,即理论方法和经验方法。 前一种方法包括航海、推进和机动理论,这些理论在过去几十年中得到了广泛的发展( Ohkusu, 1996年)。 天气路由(最优路由)是后一种方法的特点,后一种方法的基础是目前的船舶运行在很大程度上取决于直觉和经验( Yokoi等人, 2009年、2010年)。 海事组织根据EEDI(能源效率设计指数)(海事组织, 2009年)限制船舶的二氧化碳排放。 还建议在SEEMP(船舶能效管理计划)(海事组织, 2 012年)内为船舶制定能源效率业务指标。 EEDI是二氧化碳排放量与船舶海运工作的设计比率,而EEOI是船舶在运行期间实际二氧化碳排放量与运输工作的比率。 同样的运输工作需要较少的二氧化碳排放。 否则,船舶应增加二氧化碳排放量。 虽然当船舶减速时,排放往往会减少,但船舶的附加阻力会增加在重海中的排放。 因此,准确评估船舶的性能是迫切需要的天气路线。 天气路由系统利用天气预报和对船舶性能的评估来决定最佳海上航线,近几十年来天气预报的发展借鉴了计算机性能的提高。 据悉,日本气象厅目前具备提前2 64小时发布天气预报的能力。 然而,如果一次航行持续几个星期或更长时间,如国际海运,预测业绩仍然不够。 此外,许多目前的天气预报服务仍然根据运营商的经验讨论船舶的安全性。 气象动力学与船舶性能评价相结合的研究很少。
在沉重的大海里。 气象学中的天气基本上是与全球尺度进行讨论的, 尽管船舶性能是在一个海洋状态下进行评估的。 几十年来也开展了一些关于海况估计的研究( Iseki和Terada, 2002年; Nielsen, 2006年; Pas coal等人, 2007年)。 利用统计技术和船舶响应理论可以准确地估计波浪的方向谱。 这意味着在当前天气预报中考虑船舶准确响应的重要性。
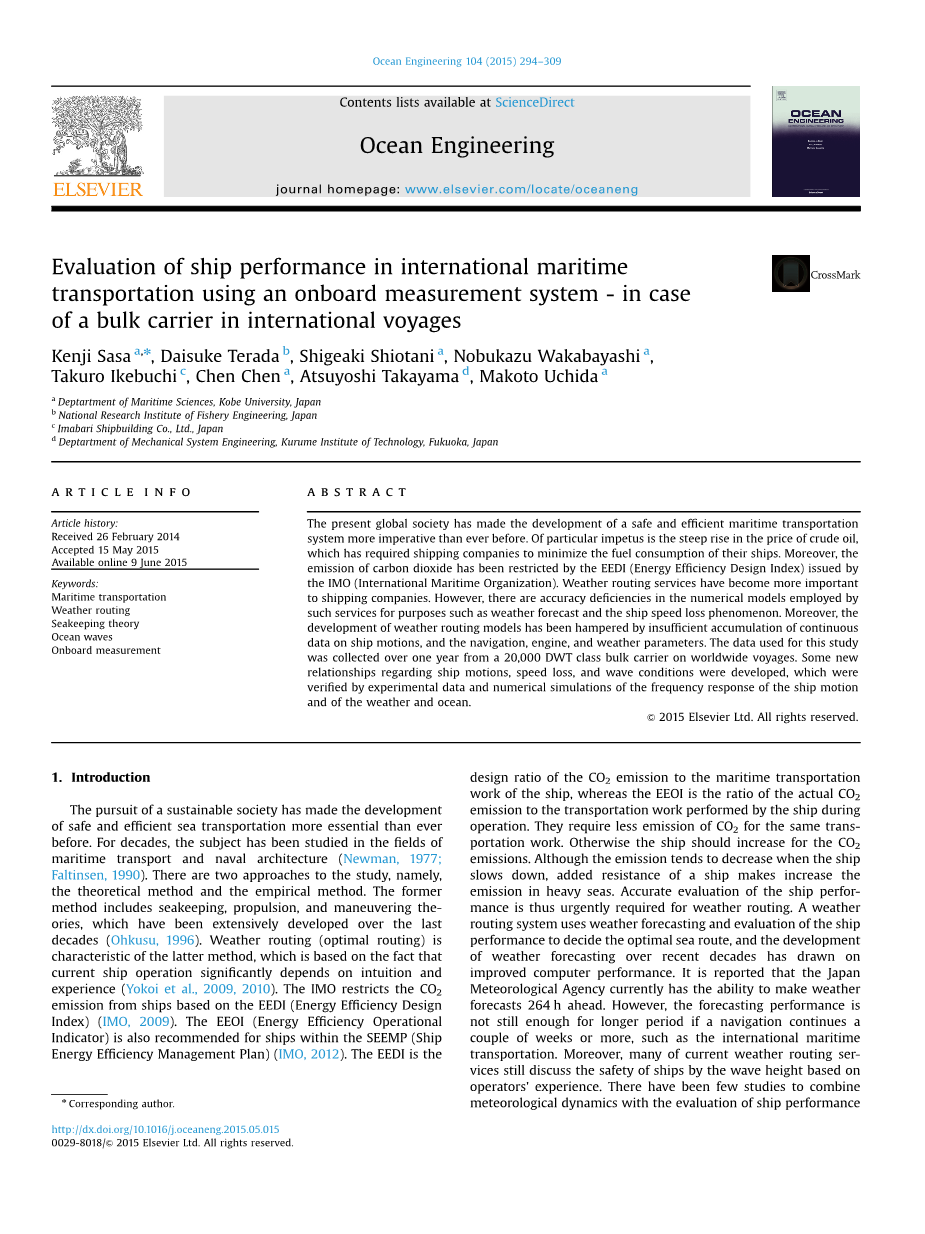
在此背景下,作者论证了对“海上运输三原则”进行全面研究的必要性。这意味着在海上运输中应同时讨论安全性、经济效益和海洋环境。 该研究项目分为三个部分,安全、经济和环境。在安全部分,新的测量系统计划收集航道期间船舶性能和天气的数据库。由于测量系统的安装和维护方便,定期班轮( LN G运输船或集装箱船) 一直受到关注。 然而,由于雷达波干扰,许多航运公司不同意安装波浪雷达系统。 一位流浪汉船主允许我们安装这个系统。 测量开始时间推迟到2010年6月,第一次数据收集在一年后实施。 这项研究是基于测量结果。 在经济部分,货物物流在国际航行中得到了考虑。 在环境部分,利用天气模拟模型研究了船舶废气的扩散。 这些研究被简要总结为一份出版物(神户大学海洋运输三原则研究小组, 2013年)。在安全和经济部件中,速度损失或燃料消耗是相关的,二氧化碳气体排放在安全环境中。 实现天气路由有多种因素.. 首先,在实际海洋中积累测量参数是很重要的。在本研究中,船舶运动的估计是作为天气预报和航海分析的结合。 当评估速度损失时,船舶运动被定义为主要参数。 并对一些关系进行了统计分析,包括油耗、发动机功率、转速等。 机载测量数据的积累不仅是必不可少的,也是分析这些问题的最初步骤。主要因素是船舶运动、导航和发动机参数以及长时间的天气参数。 还有必要为20000 T级散货船建立一个连续测量系统,并正在进行测量以收集进一步的数据。 在本研究中,从不同的角度对目前收集的数据进行了统计分析,以解释重海上的速度损失现象。 还对船舶运动进行了数值模拟,以利用EUT( 增强统一理论)( Kashiwagi, 1997年)估计随波滚动和俯仰运动的频谱。最后,利用分析结果对转速损失和油耗进行了简单的估计。
2、实际海上测量
如前所述,积累船上测量数据对于这项研究是必要的。 然而,在海上收集连续数据是困难的,特别是在长途航行中。 所使用的可持续测量系统是新建造的,并在本节中描述了船上测量的细节。 在本文中,天气数据显示了空气中的参数,如风、气压、空气温度,并包括海中的参数,如波浪、水流等。
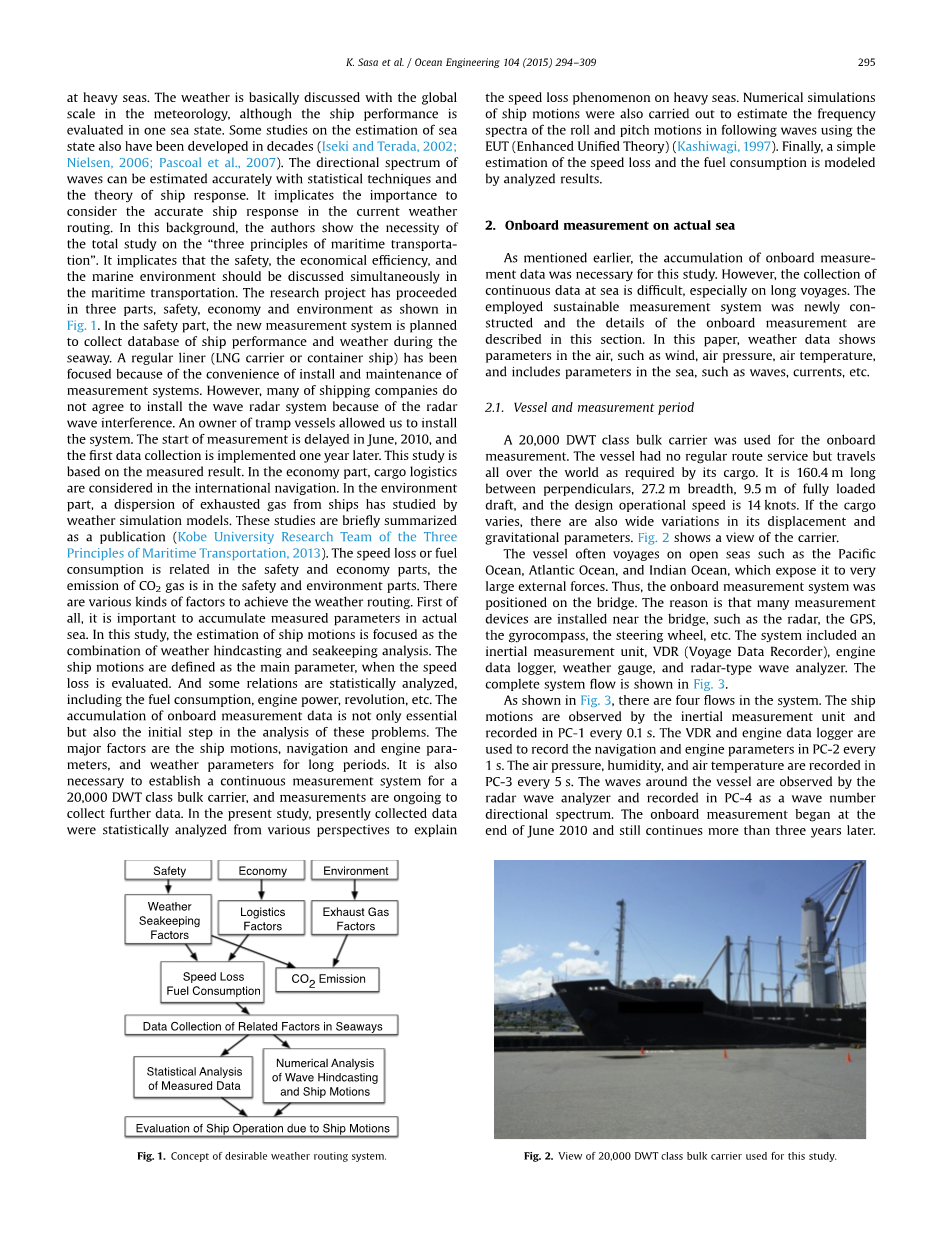
2.1 船只和测量周期
一艘20000D WT级散货船被用于船上测量。 该船没有正常的航线服务,但根据其货物的要求在世界各地旅行。 垂直间长160.4米,宽27.2米,满载吃水9.5米,设计航行速度14节.. 如果货物变化,其位移和重力参数也有很大的变化。该船经常在太平洋、大西洋和印度洋等公海航行,使其暴露于非常大的外部力量。 因此,车载测量系统被定位在桥上。 原因是许多测量装置安装在桥附近,如雷达、GPS、陀螺仪、方向盘等。 该系统包括一个惯性测量单元, VD R(航行数据记录器),发动机数据记录器,气象仪, 雷达型波分析仪。 完整的系统流程如图3所示。系统中有四个流。 船舶运动由惯性测量单元观察,每0.1秒记录一次PC-1。VDR和发动机数据记录器每1秒记录一次PC-2中的导航和发动机参数。气压、湿度和空气温度每5秒记录一次PC-3。由雷达波分 析仪观察船舶周围的波浪,并记录在PC-4中,作为波数方向谱。 机载测量始于2010年6月底,三年多后仍在继续。
2.2 船上测量的主要参数
表1给出了导航期间的主要测量参数及其状态。 如表所示,船舶运动( PC-1)是在整个期间连续的唯一参数。 导航和发动机数据( PC-2)持续近一年,未采集天气数据( PC-3).. 不幸的是, PC-2和PC-3的硬盘驱动器在测量过程中崩溃。测量的第一个月也只收集了波浪数据。 这些数据收集失败是由于数据记录器和PC,而不是传感器。 人们认为,由船舶在波浪上的运动引起的大的脉冲和振动对硬盘驱动器产生了负面影响。据估计,这种影响的幅度远大于对国内航行船只的影响。 由于硬盘驱动器容易受到冲击和振动的影响, 2012年12月,所有PC机都被固态驱动器取代。 从那时起,没有发生数据收集失败。
2.3 波雷达分析仪的性能
海浪信息是从日本无线电股份有限公司制造的海浪雷达分析仪中获取的,尽管有一些海洋波的测量方法。 如前所述,有一些关于方向谱估计的研究( Nielsen, 2006年; Pascoal和Guedes Soares, 2008, 29)。 波的方向信息可以从多个超声波传感器或浮标中获得。 在本研究中,散货船没有固定的路线,测量是针对长时间的。 海上浮标不适合航线不规则的散货船。 因此,由于成本和维护,使用波雷达分析仪,虽然在某些情况下仍然存在一些精度问题。 波雷达的性能对于决定测量波的精度是很重要的,这里将对其进行简要描述(平山等人, 2010年)。 波雷达由安装在船上的X波段雷达和雷达图像分析单元组成。 该分析单元还连接到GPS、陀螺仪和日志速度单元,以纠正船舶的航向和运动。 波信息是从雷达图像中传输的,雷达图像在海面上被反射。 波高是由S/N比的线性近似得到的,即图像中信号与噪声的比值。 线性近似的系数是通过与平静和暴风雨天气中的视觉观测进行比较来确定的。 它可以分析40到480米的波长。测量范围在距离雷达3.8公里以内,它测量1920米的二维区域。该区域被划分为256个网格点,每个网格大小为7.5米。它已经为太平洋、大西洋等几艘船只进行了验证。 安装在桥架内, 相对便于长周期测量维护,雷达的测量信号被记录到硬盘驱动器上。 数据记录方面的麻烦发生在2010-2011年,它被替换为SSD类型。 且正在与制造商设计一个稳定的数据记录系统。
2.4 船舶运动、导航和发动机参数的性质
首先定义波浪和风的方向。 无花果。 4和5显示了波浪和风的方向定义。从船尾到船头测量波浪方向,它是与船舶航向的相对角度。 另一方面,风向是在真实的轴承中测量的。 无花果。 6和7显示了2010年7月5日至7日以及9月26日至30日期间观察到的船舶运动的变化。 每小时使用统计处理的测量值绘制数据。
船舶运动被评估为显著的振幅滚动和俯仰运动在0.1s的间隔。图中的数据。 这艘船是在从日本到阿拉斯加海岸的处女航中被带走的。 观察到大约3-4米的波高,如将详细描述的那样。 滚动和俯仰的最大振幅分别为101和21。 图中的数据。 这艘船从中国驶往北美洲,在太平洋上航行时被收集了7艘。 滚动和俯仰的最大振幅分别为141和31。在图中, 8和9显示了同一时期每个小时的船舶速度、主机转速、船舶航向、风向和风速的变化。 6和7. 图 在图中, 10显示了在相同周期的每个小时内显著的波高、平均波周期和平均波方向的变化。 6和7原始数据记录在每秒,并进行统计分析1小时。从图中8可以观察到, 7月5日,该船航向在601至1301之间变化较大。 从下午到7月5日午夜,波浪方向显示90-1201。 这意味着这艘船已经处于梁海状态半天了。 船舶航向的较大变化可被认为是避免梁海的机动。6、8和10,滚动和俯仰运动也开始增加。从7月5日下午到午夜的波高时间可以看出,在7月5日晚上,滚动运动曾经减少了一点。 波浪方向已改变为30-501,并可能影响下降的运动。 然而,在7月6日,滚动运动再次超过101。 因此,在这种海上状态下,机动操作似乎不足以减少滚动运动。 相对波浪方向估计为机动后的右舷四分之一,因此无法看到相对于设计操作速度14节的速度降低。 发动机的转速几乎恒定在120转/分左右,持续60h。燃料消耗是从每小时燃料流量的差异中得到的。 在此期间,它从840升到920升不等,并且当船舶运动从18h变得更大时趋于波动。在图中。 由于测量失败,没有波浪数据。 然而,波浪高度应该更高,因为平均风速高达20米/秒。这一点将在本文后面讨论。 船速从9月29日的14节减至8节,发动机的革命也在同一时期停止了。 这应该是一种故意的速度损失,尽管当时没有船只机动的记
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[240066],资料为PDF文档或Word文档,PDF文档可免费转换为Word

