
英语原文共 11 页
游艇帆船的前沿漩涡
摘要
不对称的大三角帆是游艇用于顺风航行的高升力帆,有人提出,它的锋利前缘可以形成一个稳定的前缘涡(LEV)。如果LEV持续稳定地附着在前缘,则其可以增加帆的推力。然而,到目前为止,仅在数值模拟中存在稳定附着的LEV。在本文中,我们首次通过实验验证了在不对称大三角帆上可以形成稳定的LEV。我们在水槽中测试了一个3D打印的刚性帆,其基于弦长的雷诺数约为104。没有船体和索具的情况下对帆进行单独测试,使用粒子图像测速仪(PIV)在水平横截面上测量流场。我们发现,在帆的背风侧(吸力侧),流动在前缘处分离,再次向下游重新连接并形成稳定的LEV。LEV从帆的根部到尖端直径增大,并在尖端与尖端涡旋合并。我们使用标准检测到LEV,并且我们验证了其随时间的稳定性。 LEV提供的升力贡献是通过计算每个航段的复势模型来计算的。 该分析表明,LEV提供了超过总帆升力的20%。 这些研究结果表明,通过促进稳定LEV的形成,可以增强具有尖锐前缘的低纵横比翼的最大升力,例如大三角帆。
引言
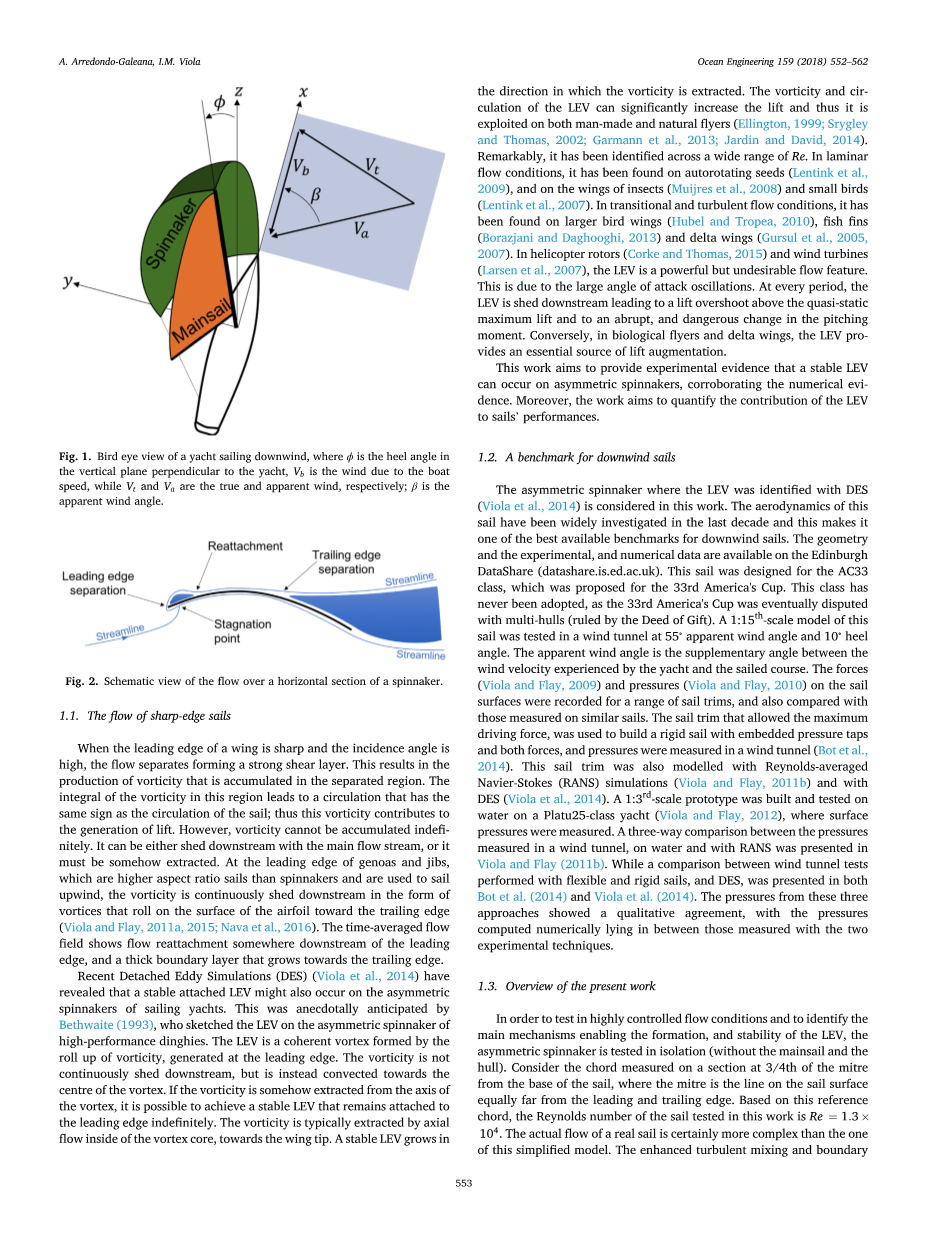
帆是一个薄翼,前缘相对锋利。顺风航行的常见配置包括两个风帆:主帆和大三角帆(图1)。主帆位于游艇后部,前缘和后缘连接于刚性结构(桅杆和吊杆)。与之相反,游艇前部的大三角帆仅通过三个角连接到船上。在任何非零攻角下,无约束的锋利前缘都将导致流动分离(图2)。这是游艇帆的主要特征之一,使它们与传统的机翼不同。事实上,前缘的流动与板的入射流动相似(Viola and Flay,2015)。流动重新附着发生在前缘下部的某处,形成单独流动的区域。该区域在弦向上较短,但从底部延伸到帆的尖端(Viola等,2013)。当顺风航行时,最有效的前帆是不对称的大三角帆,这些大三角帆是高半径,高扭曲和低纵横比的帆。弦和翼展方向上的最大弯度通常分别高于弦长的20%和50%。根部和顶部之间的扭转角度高于20°,纵横比在1.5和2之间。这些帆设计可以产生最大升力,并且其阻力对游艇性能几乎没有影响,因为阻力几乎垂直于帆道。
大的外倾可以实现高升力,但也会导致后缘分离。后部分离区域可以覆盖一半以上的弦。由于它的范围比相对较小的前缘分离区域更容易识别,后部区域的长度通常用于帆设计者可以增强帆的形状。但是,几乎所有的驱动力都是 在前沿附近产生。 因此,前缘分离区域的流体动力学的微小变化可以导致性能的显着提高。 这项工作旨在获得本节中关于流程的新见解。
然而,这项工作的影响超出了帆设计。特别是近年来人们对于无人驾驶飞行器(UAV)的非常薄的机翼以及膜翼越来越感兴趣。它们以中等雷诺数(Re)大约104-105运行。在该Re方案中,必须使用大攻角或高弯度来产生升力。因此,这个高弧形帆周围的流动与无人机机翼的设计有关。
1.1薄翼帆上的流动
当机翼的前缘薄且入射角大时,流动分离形成强剪切层。这导致了涡量的产生,这些涡量是在分离区域积累起来的。该区域中涡量的积分得到的环量与帆的环量符号相同; 因此,这种涡量有助于产生升力。然而,涡量不能无限累积。它可以在主流流向下游,也可以某种方式提取。在genoas和jibs的前沿,它们比大三角帆具有更高的纵横比帆并且用于逆风航行,涡量在下游以涡旋的形式不断脱落,涡旋在翼型表面向后缘滚动(Viola and Flay, 2011a, 2015;Nava等,2016)。时间平均流场显示前缘下游某处的流再附着,以及向后缘生长的厚边界层。
最近的Detached Eddy Simulations(DES)(Viola et al.,2014)透露,稳定附着的LEV也可能出现在帆船游艇的不对称大三角帆上。这是Bethwaite(1993)的传闻,他将LEV描绘在高性能小艇的不对称大三角帆上。LEV是由前缘产生的涡度卷起形成的相干涡旋。涡度不是连续地向下游流出,而是朝向涡流的中心对流。如果以某种方式从涡旋轴提取涡量,则可以实现稳定的LEV,并将持续地保持附着在前缘上。涡量通常是由旋涡核心内的轴向流向翼尖的方向提取的。稳定的LEV在提取涡量的方向上增长。LEV的涡度和环量可以显着增加升力,因此它可以在人造和自然飞行器上使用(Ellington,1999; rygley和Thomas,2002; Garmann等,2013; Jardin和David,2014)。值得注意的是,它已经在广泛的雷诺流动中被发现。在层流条件下,它在自旋种子(Lentink et al.,2009)和昆虫的翅膀(Muijres et al.,2008)以及小鸟的翅膀上被发现(Lentink et al.,2007)。在过渡和湍流条件下,它已在较大的鸟类翅膀(Hubel和Tropea,2010),鱼鳍(Borazjani和Daghooghi,2013)和三角洲翅膀(Gursul等,2005,2007)上被发现。在直升机旋翼(Corke和Thomas,2015)和风力涡轮机(Larsen等,2007)中,LEV是一种强大但不合需要的流动特征。这是由于大的攻角振荡,在每个时期,LEV向下游脱落,导致升力超过准静态最大升力,并且突然瞬间发生突然且危险的变化。相反,在生物翅膀和三角翼中,LEV提供了升力增强的重要来源。
这项工作旨在提供实验证据,证明稳定的LEV可以在不对称的大三角帆上发生,证实了数值证据。此外,该工作旨在量化LEV对帆的性能的贡献。
1.2顺风帆的基准
在这项工作中考虑了用DES识别LEV的不对称大三角帆(Viola等,2014)。这种帆的空气动力学在过去十年中得到了广泛的研究,这使其成为顺风帆最好的基准之一。模型,实验和数值数据可在Edinburgh DataShare(datashare.is.ed.ac.uk)上获得。这支帆是为AC33级而设计的,这是为第33届美洲杯提出的。这个级别从未被采用,因为第33届美洲杯最终有多个船体的争议(由礼品契约统治)。该风帆的1:15比例模型在风洞中以55°视角和10°跟角进行了测试。表观风角是游艇经历的风速与航行过程之间的补角。对帆表面的压力(Viola和Flay,2009)和压强(Viola和Flay,2010)记录了一系列几路,并与在类似帆上测量的那些进行了比较。利用最大驱动力的帆边,设计了一种嵌有压头和两种力的刚性帆,并在风洞中测量压力(Bot et al.,2014)。该风帆饰条还使用reynolds-mean Navier-Stokes (RANS)仿真(Viola and Flay, 2011b)和DES (Viola et al.,2014)进行了建模。建造了一个1:3比例的原型,并在一个25级的platu25游艇上进行了水上测试(Viola和Flay,2012),在那里测量了表面压力。在Viola和Flay(2011b)中介绍了在风洞,水上和RANS中测量的压力之间的三向比较。而在Bot et al.(2014)和Viola et al.(2014)两篇文章中,都对采用柔性和刚性风帆以及DES进行的风洞试验进行了比较。这三种方法测得的压力值在定性上是一致的,数值计算的压力值介于两种实验方法测得的压力值之间。
1.3目前的工作概述
为了在高度受控的流动条件下进行测试并确定能够形成LEV的稳定性的主要机制,不对称的大三角帆进行单独测试(没有主帆和船体)。斜桁距帆座的四分之一,其中斜桁是帆面上距前缘和后缘同样远的线。基于该参考弦,在该工作中测试的风帆的雷诺数是Re=1.3times;104。实际航行的实际流量肯定比这个简化模型更复杂。在该模型中没有考虑在较高雷诺数下增强的湍流混合和边界层效应。然而,已经发现LEV对雷诺数的影响有很大波动(Gordnier等,2009)。而且,其他帆和船体的影响被忽略了。后帆产生上升流,增加有效攻角。因此,通过调整攻角可以主要解决这些影响。靠近船体和海面会导致帆底附近水流的局部变化。这种变化的影响在LEV上是微不足道的,因为LEV主要是在帆的最高部分发展的。起始流量是均匀的,并没有考虑到帆完全经历的表观风速的高度变化。然而,这种影响也是适度的,主要可以由帆的不同纵倾来解释。出于这个原因,1.2节中描述的基准实验和模拟考虑了均匀的起始流动。 因此,虽然这项实验没有提供全尺寸流量的定量描述,但它能够描述顺风帆流的关键特征。
本文的其余部分安排如下:在第2节,试验方法,提出了方法的细节,包括帆的几何形状,实验装备,流动条件,用于测量流场的仪器以及数据如何析。在第3节“结果”中,给出了流量测量,包括LEV的分析和LEV对帆的性能贡献的估计。 最后,第4节,结论,总结了主要发现。
试验方法
2.1建立帆模型
用于此调查的3D打印模型的几何形状可在www.ignazioviola.com上获得。该模型的面积为A=0.045m2。从基座到头部的扭转角为16°,最大轴向弯度为0.40c0,最大翼展方向弧度为0.65c0,其中c0=0.114m,是在3/4处航行部分的弦长。该模型厚3毫米。在前缘的流动分离促使了边缘斜切的增大。前缘和后缘的倒角为20°,从底部到头部的跨度的前3/4。在帆的跨度的顶部1/4处,倒角从20°逐渐增长到70°,允许厚度在斜切上保持恒定。帆的头部是钝的。
该模型使用Fortus 250 3D打印机以ABS为材料进行3D打印的。它安装在由杠杆臂控制的旋转轴上,旋转轴用于精确控制攻角。轴连接到一个6毫米厚的丙烯酸板上,该板连接到一对45times;45毫米的铝制轧制件上,该轧制件连接在水槽的侧壁上。该机械臂允许改变攻角,并通过一个拱形刻度盘系统来确保其测试位置(图4)。通过DES测试,轴设定为相同的视角(55°)和后跟角(10°)(Viola等,2014)。
2.2水槽
水槽是爱丁堡大学工程学院工程系统研究所的实时波测试设施。它长2米,宽0.4米,高0.9米。水深设置为0.5米,帆水平放置在水面以下0.1米处。机械臂与水槽壁之间的自由空间为两侧0.05米。在Uinfin;= 0.1146m / s的均匀流下测试该模型。利用激光多普勒测速仪在模型上游1 m处测量了7%的湍流强度。如此大程度的湍流是由于缺乏收缩段,这是在一个类似的全尺度系列游艇得出的经验。因此,这里研究的旋涡流动结构在湍流中对流,就像它们在全尺寸下那样。如McWilliams(1984)所示,相干涡旋对湍流扰动具有高度弹性。
2.3粒子图像测速
使用粒子图像测速(PIV)系统进行流动可视化,该系统由Solo 200XT脉冲双头Nd:YAG激光器组成,在lambda;= 532nm的波长下具有200mJ的能量输出。相机是CCD Imperx 5MP,分辨率为2448pxtimes;2050px,尼克尔f/2,50mm镜头。接种颗粒是银涂覆的中空玻璃球,平均直径为14mu;m,密度为1.7g/cc。为了减轻表面反射,使用罗丹明B的第二层涂层将一层哑光黑漆涂在帆上。施加第三层丙烯酸涂层以保护罗丹明B涂层免受水的影响。在相机上使用滤光器以减去罗丹明B的波长并使反射光最小化。背景扣除(Wereley等,2002)使得能够在靠近墙壁的情况下进行测量。然而,由于帆的曲率和激光片的方向,前缘区域不会受激光反射的影响。
激光束通过两个镜子和一系列水下LaVision光学器件重定向,以产生与流动平行的激光片。激光片完全浸没,如图4所示。激光片的厚度约为2毫米。 记录帆的三个横截面:平面A,B和C(图3)。 它们分别位于从帆根部到尖端的距离的7 / 8,3 / 4和1/2处。
PIV对图像以7.5Hz采样。 应用两遍自适应相关。 第一遍具有64像素64像素的询问窗口,具有高斯加权和50%窗口重叠。 第二遍具有24 px * 24 px询问窗口和75%窗口重叠。从全时间序列生成平均字段,并使用3 * 3滤波器来平滑矢量字段。
2.4涡流检测标准
用gamma;1和gamma;2标准(Graftieaux等,2001)检测涡流,这些标准已成功应用于PIV数据(Rabinovitch等,2012; Harbig等,2013; Pitt Ford和Babinsky,2013))。 纬度2标准是gamma;1标准的非伽利略不变量版本,因为减去了局部对流速度。 图5示出了gamma;1算法的示意图。 使用以P为中心的大小为2112的方形窗口S内的PIV数据计算点P处的纬度1标准。在S内的每个点M处,矢量PM与速度uM之间的角度theta;的正弦值是计算。 P中的gamma;1值由下式给出
|
|
|
(1) |
其中N是S中网格点的数量。
在gamma;2准则中,区域S中的平均对流速度lt;Ugt;从询问窗口中的每个速度点中减去,因此
|
|
(2) |
其中
|
|
(3) |
2.5校准涡流检测标准
为了校准gamma;1和gamma;2标准,在分离的Lamb-Oseen涡旋上测试这些标准。 Lamb-Oseen涡旋的切向速度为
|
|
(4) |
其中Gamma;LO是涡旋的强度,r是径向坐标,l0是核心涡旋半径,定义为切向速度最大的径向坐标。 它的流通是由
|
|
(5) |
Lamb-Oseen涡旋的gamma;1和gamma;2标准如图6所示。针对询问窗口
资料编号:[5084]

