
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
船舶碰撞中晃荡相互作用实验和数值研究
摘要
船舶碰撞中的晃荡相互作用在实验和数值上均得到了研究。碰撞中的接触载荷导致的船舶运动的快速变化引发船上部分填充的液舱剧烈晃荡。晃荡影响到碰撞动力学并且减少可用于结构变形的能量。通过一系列模型尺度实验获得了对这种相互作用现象的理解,在实验中一艘具有两个部分填充液舱的撞击船与一艘初始静止的没有装载任何液体的被撞船相撞。研究了对舱内液体质量以及碰撞速度对结构变形的影响。将线性晃荡模型与理论碰撞模型相结合,对这种情形进行了数值模拟。仿真模型和实验结果进行了验证,并且在水舱中等填充水平的条件下达到了很好地吻合,而相应地浅层填充水平下变形能被高估了高达10%。
关键词:碰撞动力学;晃荡相互作用;模型尺度实验
1.引言
大规模的船舶碰撞实验(Wevers和Vrede-veldt,1999)揭示了部分填充舱内的流体晃荡对船舶碰撞的动力学有重要影响(Tabri等,2009a,b)。两条水上船舶之间的系列大尺寸实验旨在从不同结构概念的表现并深入地了解碰撞动力学。为了得到预设的船舶吃水,一些船舶上的舱室仅被部分填充,导致可能发生液体晃荡。
这里,我们利用两个大尺寸实验的结果—Y型试验,两艘船模舱室内都装有大量液体(Wevers and Vredeveldt, 1999);X型试验,水舱内仅装有少量液体(Wolf, 2003)。众所周知,在外部动态激励下,未装满液体的容器容易剧烈晃荡,其中流体振荡的特征周期取决于液体的深度和容器的水平尺寸。晃荡对碰撞动力学的影响是通过施加在船体舱室结构上的随时间变化的载荷以及通过存储部分动能表现出来的。在碰撞中,晃荡是由船舶运动的快速变化引起的。如果晃荡液体的量相对于船舶的总质量显著,则碰撞中的能量分量的分布会发生改变。用于模拟船舶碰撞的常规计算方法通常没有将晃荡的相互作用考虑在内。
Tabri等人第一次在大尺寸碰撞实验的数值仿真中考虑了晃荡的相互作用(Tabri et al., 2009a,b),其中利用了由Graham and Rodriguez在1952年建立的数学模型。这种方法是基于线性势流理论。数值模拟结果与实验结果之间的对应性很好,证明了晃荡模型适用于碰撞模拟。在这个大尺寸实验中,水的深度与水舱在晃荡方向上的尺寸之比高于0.2,这被认为是线性晃荡理论适用性的下限(Chen et al.,2008)。计算结果表明晃荡运动储存了部分的动能,因此减少了碰撞中可用于结构变形的能量(Tabri et al.,2009a,b)。由于有更大的动能,撞击船相较于被撞船,前者发生的晃荡更为显著。Zhang和Suzuki(2007)利用拉格朗日法和任意拉格朗日—欧拉法,从数值上研究了碰撞过程中的晃荡相互作用。在此基础上,他们总结出相较于更先进的包含了非线性影响的数值模型,线性晃荡模型低估了可用于结构变形的能量达约17%。然而,在他们的仿真中,水舱内注水的高度达95%,因此,屋顶效应的影响可能是显著的,表露出在线性模型中一个非常不合适的设置。
在大尺寸实验中,两条船上的装有大量液体的水舱内都发生有晃荡运动,因此,几个晃荡过程同时产生相互作用使得分析单纯的晃荡现象变得繁琐复杂。为了更深入地理解这种重要的晃荡现象,决定采取单独的模型尺度碰撞实验,在实验中晃荡的直接影响可以通过比较水舱内有水和无水两种情况下的实验结果得到。之后,这些实验被归类为湿式或干式测试。重点放在对称碰撞实验上,实验中撞击船模型成直角撞向被撞船模的船舯位置。这种处理简化了船舶运动对于晃荡的影响。两个液舱被安装在撞击船的船模上,但是被撞船船模上并没有装载任何液体。
在现有研究中,Graham and Rodriguez (1952)的线性晃荡模型在Tabri et al. (2009)的碰撞模型中得以实现,其中的碰撞力模型相较于Tabri et al. (2009a,b)的已被改进。本文研究目标是验证在不同填充水平和不同碰撞速度下的计算模型的可靠性,由此在船舶概念设计阶段为结构设计提供一个适用的经过验证的数值计算模型。
2.在碰撞中的晃荡模型
在碰撞中,撞击船的动量是通过接触载荷传递给最初不动的被撞船。当这两艘船相撞时,它们的质量保持不变,动量的变化是由速度变化引起的。在碰撞动力学中,总能量由动能EK,变形能ED和克服水动力所做功的总和组成。对称碰撞中,相对于撞击船的初始动能的变形能EKA|t = 0传统上可以用Minorsky(1959)的公式来估计:
|
|
(1) |
式中上标A指撞击船,B指被撞船。a1表示纵荡运动产生的水动力附加质量,a2表示横摇运动产生附加质量,m表示船的质量。这个模型考虑了这艘船的质量m和水动力附加质量a引起的惯性力。水动力力学中的其他组成部分,例如摩擦阻力,恢复力以及水动力阻尼被排除在外。
如果其中一艘船或者是两艘都有由于未注满液体而存在自由液面的舱室,舱室内的液体会在碰撞中开始晃荡,如图1,并且可以等效为刚性固定质量与承载结构在较长的时间间隔内相互作用。因此,晃荡质量在动量传递中的参与被推迟,并且等式(1)不再成立。
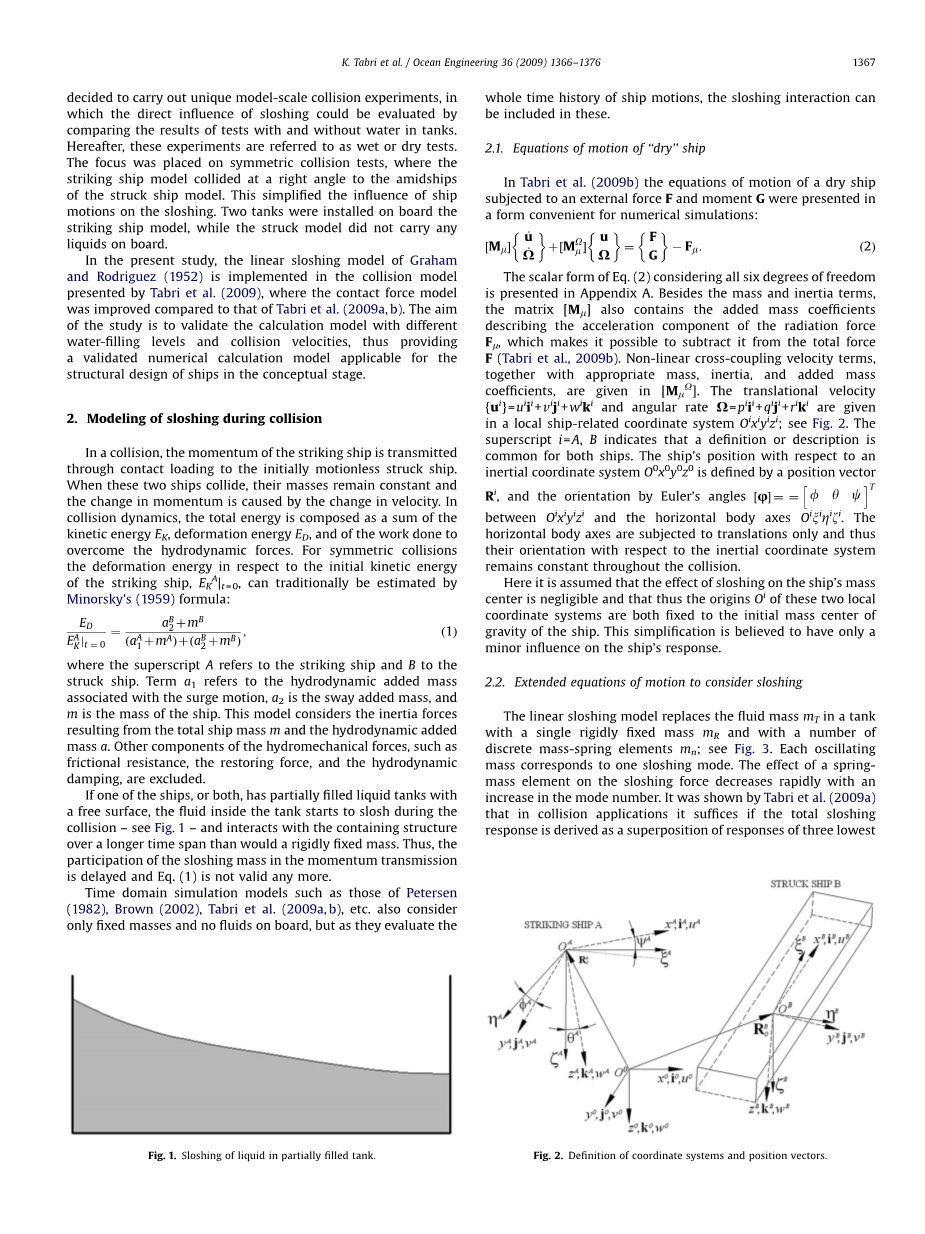
图1 部分装载水舱内的液体晃荡 图2 坐标系和位置矢量的定义
例如Petersen(1982),Brown(2002),Tabri(2009a,b)等人的时域仿真模型,也只考虑固定质量和船上没有液体情况,但是当他们评估船舶运动的整个时间历程时,可以将晃荡相互作用包含其中。
2.1 “干式”船舶的运动方程
在Tabri(2009b)等人的文中,“干式”船受到外力F和力矩G的运动方程以便于数值模拟的形式呈现:
|
|
(2) |
方程(2)的标量形式中考虑的所有六个自由度已在附录A中给出。除质量和惯性项之外,矩阵还包含描述辐射力的加速度分量的附加质量系数,这使得从总力F中减去它是可能的(Tabri et al.,2009b)。非线性交叉耦合速度项以及适当的质量,惯性以及附加质量系数,都在矩阵给出。位移速度和角速率在相对于船舶的局部坐标系;如图2。上标表示对两条船的定义或描述是相同的。相对于惯性坐标系,船舶位置是由方向矢量定义的,方向是由和水平船体轴之间的欧拉角定义。水平的船体轴只受位移,因此,他们相对于惯性坐标系的方向在整个碰撞过程中保持不变。
这里假定晃荡对船体质量中心的影响可以忽略不计,因此这两个局部坐标系的原点都固定在船的初始质量重心上。这种简化被认为对船只的响应只有很小的影响。
2.2 考虑晃荡的扩展运动方程
线性晃荡模型用单个刚性固定质量和多个离散质量弹簧元件代替液舱中的流体质量;如图3,每个振荡质量对应于一个晃荡模式。随着模式数量的增加,弹簧质量元件对晃荡力的影响迅速减小。Tabri(2009a)等人证明了
图3 简化离散晃荡的力学模型
这一点,他们认为在碰撞应用中,如果总晃荡响应是作为三种最低晃荡模式的响应的叠加得到的,即一个水舱内振荡质量的数量是三个,那么这种简化模型是合理的。通过刚度系数为的弹簧和阻尼系数为阻尼器将单个质量连接到舱壁上,该质量块的平移运动方程为:
|
|
(3) |
在局部坐标系中,和表示水舱的加速度,速度和位移,,和对应地表示振动质量在某个运动分量方向上相同的物理量。这里假定角运动不影响晃荡动态,反之亦然。因此,晃荡相互作用被认为仅作用于船舶局部坐标系中的横摇和纵荡运动。在Graham和Rodriguez(1952)和图3的基础上,第n个振动质量元件的质量和刚度系数的公式是
|
|
(4) |
|
|
(5) |
式中是水舱中水的高度,是水舱在晃荡方向上的尺寸。相应地,阻尼系数:
|
|
(6) |
式中是第n个振荡质量的固有频率,呈对数递减。
与船舶相关的自由度总数,是刚性自由度和振动质量的总和
|
|
(7) |
其中 ,式中是未装满的液舱的数量。
运动方程(方程(2))现在扩展到考虑晃荡相互作用。与方程(2)结合,形成了三个的阶新矩阵,和,其中包含,和项以及包含方程(3)中振荡自由度的矢量,和。因此,形成了6个由表示的的零阶矩阵被添加到和以便解释振荡自由度。 因此,这给出个自由度的新运动方程:
|
|
(8) |
式(8)除了刚体运动外还包含六个振动自由度,在附录B中的以标量形式给出。位移被评估为位置矢量和对局部坐标系的投影,给出和,其中变换正交矩阵的组成形式(Clayton and Bishop,1982)
|
|
(9) |
运动方程的时间积分基于一个具体的五阶Dormand-Prince积分方案(Dormand and Prince,1980),该方案是龙格—库塔解决者家族的成员。对于有效时间内的积分,等式(8)右边的力在时间步长期间保持常数,而左侧的运动在每个子增量中更新。此外矩阵在每个子增量中更新,因为它包含速度项。Tabri(2009b)等人提供了由周围的水和船舶之间的接触引起的外力和的定义。
方程(8)提供在积分增量结束时的运动。在那里,通过对局部坐标系中的速度进行时间积分并且通过矩阵将所获得的平移位移增量转换为惯性框架来评估船舶相对于惯性框架的新位置。这些增量被添加到位置向量。通过将角增量添加到欧拉角来更新方向。给出位置和方向,可以计算船舶之间的穿透力和接触力。此外,右侧的其他外力也会更新。
运动方程式(方程(8))是为每条船建立的。这些方程在进行时间积分增量时分别处理,并且在每个积分步骤之后更新相互接触力以保持运动的连续性。
3.考虑晃荡相互作用的模型尺度碰撞实验
通过在赫尔辛基理工大学试验水池进行的一系列模型尺度实验,获得了对晃荡物理学的理解;如图4。Tabri(2007)等人详细描述了船模和它们的缩放比例,其中提出了无晃荡相互作用的对称碰撞实验。这里描述了对湿式测试所需的测试装置和测量系统的附加修改。
3.1湿式设置
模型试验设计为与大型实验物理相似(Wevers和Vredeveldt,1999)。基于弗劳德尺度定律的可行缩放因子是(Tabri等,2007)。
图4 船上有晃荡水舱的撞击船模型
图5 两个晃荡水舱的测试设置
为保持Y型核心结构大型试验所用船舶的几何相似性(Wevers and Vredeveldt,1999),模型具有以下主要尺寸:长度,深度,撞击船的宽度,被撞船的宽度。如图4和5所示,两个液舱被安装在撞击船模型上。在那里,舱室的侧面高度大于在大型试验中使用的船的侧面高度,以减少屋顶效应的影响。在模型测试中,每个水舱的长度约为模型总长度的1/4。与大型测试相比,舱室的长度被放大了,以便更清楚地了解这些现象。在这些舱室尺寸的情况下,这条撞击船就像是一艘大型原油船或一艘新型的河上油轮,增加了侧面结构的耐撞性,允许更大和更长的货油舱(van de Graaf等人,2004)。
图6 模型规模实验中使用的刚性球尺寸
图7 在大尺寸实验和模型尺度实验中测量的力—穿透曲线。将大尺寸测量与模型尺度的缩尺比是lambda;= 35。
撞击船模型配备了一个轴对称的刚性球,其尺寸如图6所示。在被撞船模型中,一块聚氨酯泡沫被安装在碰撞位置。泡沫的抗压强度为(Ranta和Tabri,2007)。根据这个值和接触表面的形状建立模型尺度的力穿透曲线。这个力—穿透曲线,如图7所示,很好地对应于Y型舷侧结构的大尺寸实验(Tabri et al.,2009a,b)期间测量的结果,并且按缩小。因此可以说,模型尺度和大型实验之间的动力相似性大致保持不变。
撞击船模型连接到试验水池的滑架上,并且被平滑地加速到期望的碰撞速度以防止在碰撞之前产生晃荡。滑架在模型重心附近和模型之间存在连接,以避免初始垂荡运动。被撞船的模型用线盘固定在水池中。两个船模都是在接触之前被释放。
借助Rodym DMM非接触式测量系统,可以将撞击船的六个相对于惯性坐标系的运动分量都记录下了。这需要船模的重心位置作为输入值。在碰撞期间这个值被认为是恒定的。正如Tabri(2007年)等人所讨论的那样,Rodym系统中的后处理造成了测量信号的时间滞后。为了与其他测量信号精确同步,撞击船的纵向加速度也用Schaevitz LSBP-1加速度计测量。被撞船模型的所有六个运动分量都由安装在船上的Crossbow DMU-FOG运动模块记录。该测量系统还为稳定的垂荡角和首摇角提供时间历程。
用四根由钢丝制成的电阻波探头测量晃荡水舱中的自由表面高度。前舱安装三个探头,一个安装在后舱;如图5。刚性探头通过力传感器连接到撞击船(Tabri等,2007)。由于其他分量在对称
全文共9632字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16355],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

