
英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
新加坡海峡船舶碰撞频率估算
本文旨在估算新加坡海峡的船舶碰撞频率。该频率来源于英国劳氏海上情报分部数据库的实时船舶运动数据所得到的船舶会遇次数和碰撞发生概率的乘积。结果显示,集装箱船在滚装运输过程中具有最高的船舶碰撞频率,而客船具有最低的船舶碰撞频率。油轮引起的正面碰撞频率最高。在新加坡海峡,风险最大的追越碰撞区域位于经度103°50′E和104°12′E之间。风险最大的正面碰撞区域位于经度103°50′E和104°00′E之间,而大多数交叉碰撞发生在经度103°50′E和104°12′之间。交通航道上的船舶碰撞频率为每年1.75次。目前,海峡西行交通的碰撞风险比东行交通更大(7月西行碰撞次数为0.0991次,而东行碰撞次数则为0.0470次)。此外,白天估算的船舶碰撞频率比晚上低。本文的结果将有利于新加坡海事和港务局进一步加强在新加坡海峡实施的航行安全策略。
关键词:AIS 船舶碰撞 船舶碰撞频率
1 引言
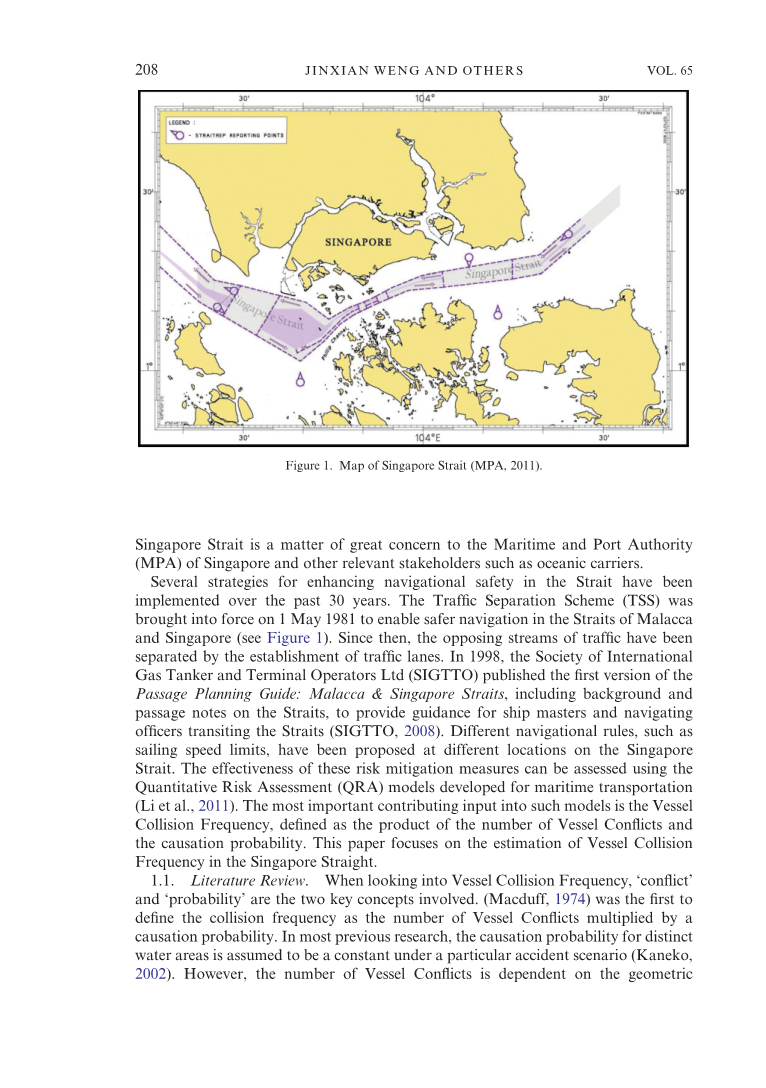
新加坡海峡位于马六甲海峡西部与南海东部之间,长达105公里。它将世界上最大的港口之一与世界其它部分连接起来,并且拥有高密度的船舶运输量。每天有200多艘船经过海峡,年吞吐量约7万艘,运输东北亚80%的石油,以及世界上三分之一的交易货物,包括中国的制造产品,印度尼西亚咖啡等等。尽管新加坡海峡对全球经济具有重要意义,但对于一些大型船舶(主要是油轮)来说还是不够深。海峡还有很多较窄和较浅的航道。在飞利浦部分,它缩小到2.8
图一.新加坡海峡地图(MPA,2011)
公里宽,航道仅有2.1公里宽,成为了这世界上的一个关卡。因此,通过新加坡海峡的船舶航行安全是新加坡海事与港口管理局(MPA)以及海运承运人等其他利益相关者关注的问题。
过去三十年来,加强海峡航海安全的几项措施已经实施。分道通航制(TSS)于1981年5月1日生效,以便在马六甲和新加坡海峡更安全地航行(见图1)。从那时起,通过建立交通航道分开相反的交通流。1998年,国际油轮和油码头协会(SIGTTO)发布了第一版“海峡通道规划指南:马六甲和新加坡海峡”,包括了海峡背景和通行记录,为船长和通过海峡提供指导(SIGTTO,2008)。在新加坡海峡的不同地点提出了不同的航行规则,例如航速限制。这些风险缓解措施的有效性可以使用为海上运输开发的定量风险评估(QRA)模型进行评估(Li et al, 2011)。对这种模型最重要的贡献是船舶碰撞频率,它被定义为船舶会遇次数和碰撞发生概率的乘积。本文重点介绍新加坡直航船舶碰撞频率的估算。
1.1 文献综述
当研究船舶碰撞频率时,“碰撞”和“概率”是两个关键概念。Macduff (1974)首次将碰撞频率定义为船舶会遇次数和碰撞发生概率的乘积。 在以前的大多数研究中,在特定事故背景下,不同水域的碰撞概率被假定为常数(Kaneko,2002)。但是,船舶的碰撞次数取决于水域参数,船舶尺寸,交通流量,船舶的对地航速(SOG)和对地航向(COG)。 换句话说,船舶碰撞频率的准确性主要取决于准确估计船舶碰撞次数。
Macduff运用分子碰撞理论通过假设船舶以相同的速度沿相同的路线运动来估计船舶碰撞的次数。这个假设显然是不现实的,可能会导致结果偏小。 Fujii(1971)提出了一个基于几何和运动定律的模型来估算船舶通过一个给定区域时的平均碰撞次数。然而,由于避碰操作假设占船长的9.5~16.3倍,在一定程度上高估了结果,因此这在实践中非常保守。实际上,通过新加波海峡的船舶之间的最小距离大约为船长的三倍,它被定义为基于测量点(即雷达屏幕上船舶雷达回波的“点”)时两艘船舶在最接近时的安全距离。在Fujii的开创性工作之后,又有人提出了船舶领域概念来估算船舶碰撞次数(Pietrzykowski,2008; Pietrzykowski and Uriasz,2009; Szlapczynski,2006;Wang, 2010)。举个例子,Fowler and Sorgard (2000)通过假设当两艘船相互间距离为0.5海里时存在危险的情况提出了一个基于船舶领域的模型。Pedersen(2002)也应用船舶领域理论对大型悬索桥进行了风险分析。然而,两艘船之间的最小距离依然被假定为一个常数,只有正面碰撞才被考虑在内。
基于计算机模拟的方法可以定量检查各种航行安全问题。 Dand(2001)介绍了国际航运会议常设协会(PIANC)水道设计的模拟方法。 Zhang和Huang(2006)利用计算机模拟方法来建立船舶模型以获取试验经验。但是,仿真方法非常耗时。由于缺乏实际的标准和对规则和航海技术的不正确理解,这也可能导致偏差或不准确的结果。因此,使用模拟方法来估算船舶碰撞次数是不合理的。
COWI(2008)最近提出了一个数学模型来估算追越和正面相遇局面的会遇次数。在这个模型中,船舶碰撞的次数取决于航线段长度,两个航行方向的通航密度,船舶的宽度和速度以及船舶与航线轴线的偏差。这个模型通常高估了追越和正面碰撞频率,因为连续航行船只的独立性没有被考虑在内。
除了上述的方法和模型,研究人员还提出了其他几种模型和方法。 Tan和Otay(1999)建立了一个简单的随机游动模型来估算船舶碰撞次数。为了评估新加坡海峡的航行安全,Qu et al(2011)提出了三个船舶碰撞风险指数:速度离散度,加速度与减速度以及船域重叠的数量。
1.2 目标与贡献
本研究旨在估算新加坡海峡的船舶碰撞频率。船舶碰撞频率为船舶会遇次数与碰撞发生概率的乘积。船舶碰撞的次数通过使用劳氏船级社海洋情报分部(Lloyd#39;s MIU)自动识别系统(AIS)提供的实时船舶信息进行计算。根据估算的船舶碰撞次数,可以确定新加坡海峡碰撞风险最高的地区。本文还研究了船舶航向和时区对船舶碰撞频率的影响。
这项研究的贡献是双重的。首先,它启动了对新加坡海峡船舶碰撞频率估算的研究。其次,这项研究的结果可以被新加坡的MPA用来选择适当的航行安全策略。
本文的其余部分安排如下:第2节介绍了劳氏船级社的MIU AIS数据和数据处理方法;在第3节中,建立了船舶碰撞频率估算模型,其次是第4节的结果和讨论;最后一节介绍本文的研究结论。
2 数据
2.1 数据采集
国际海事组织(IMO)国际海上人命安全公约(SOLAS)要求自2002年起,所有大型海轮(>300GT)和所有客船均应配备AIS (Mou et al , 2010)。通过专用甚高频(VHF)无线电,AIS信息可以在船舶之间传输,从船到岸,反之亦然。简而言之,AIS是使船舶彼此“可见”的技术。它可以记录船只行为的信息,包括人类行为和船舶的操作性的影响。
在这项研究中使用了来自英国劳氏MIU AIS数据库一个月(2009年7月)的AIS数据。总共收集了166182条AIS记录,来评估在图1中显示的新加坡海峡在103°21′E和104°35′E区域之间的船舶碰撞频率。图1中的虚线表示新加坡海峡的分道通航制)。每个AIS记录在每个报告时间(每3到10秒)包括每个船只的以下信息:MMSI(水上移动业务标识)号码,纬度位置,经度位置,SOG和COG。
2.2 数据处理
尽管所收集的大部分AIS记录都是准确的,但有一些记录的位置和速度信息不准确。 例如,发现0.18%的103°21′E到104°35′经度位置数据超出了范围,而SOG数据的0.25%超过了一个难以置信的速度50节。 为了处理这些不准确的SOG和位置数据,本研究采用了(Qu et al , 2011)提出的数据清理方法。
此外,超过35%的AIS记录不包括船舶长度。删除这些不完整的数据是不恰当的,因为这会干扰实时数据的完整性。由于船舶长度是船舶碰撞频率估算的一个关键参数,我们提出以下步骤来确定不完整的数据,将缺少船舶长度的AIS记录划分为两类:
类别1:(具有国际海事组织编号的船舶船长缺失)。 船长与以下因素高度相关:净登记吨位(NRT),总吨位(GT)和载重吨位(DWT)。 但是,NRT和DWT的值有时不可用并且为空。考虑到上述因素的可能性,我们首先将这个类别的数据分为以下四类:
- NRT = null and DWT ne; null.
- NRT = null and DWT = null.
- NRT ne; null and DWT = null.
- 其它
对于每一组,我们都使用多重线性回归方法来估算与这四个因素相关的系数。 使用这种方法,船长l可以被形成为以下分段函数:
等式(1)中的船舶长度函数由于高预测性可以提供准确的估算。
类别2:(没有国际海事组织编号的船舶船长缺失)。对于此类船舶,缺失的船舶长度将由数据库中所有可用船舶长度的平均值(asymp;197米)来确定。
3 船舶碰撞频率模型
受到(Fujii et al., 1974; MacDuff, 1974 and Mou et al., 2010)的工作的启发,本研究中的船碰撞频率估算式子如下:
其中:
f:容器的碰撞频率
N:船舶会遇的数量
pc:碰撞发生概率,即给定的船舶不能避免碰撞的可能性
为了计算船舶碰撞的次数,我们采取三分钟的时间间隔(Delta;T= 3分钟)来分析收集的AIS数据。船舶碰撞被定义为船舶在下一个时间间隔内进入另一艘船舶的区域的危险情况(Montewka et al., 2010)。在这里,船舶区域表示为航海者希望避开其他船只或物体的船舶周围区域(Goodwin,1975)。 图2显示了船舶碰撞的一个例子,船舶B将在下一个时间间隔Delta;T内侵入船舶A的区域。请注意,船舶A的区域半径(R)并不是固定的,而是随着船舶长度而变化。可以看出,大多数区域半径约为船长的三倍(Mou等人,2010)。 因此,特定船只的区域半径可以简单地通过下式估算:
Domain of Vessel A
图2.船舶碰撞
其中Ri是船舶i的区域半径,li是船舶i的长度。
令表示在时间t时特定船只i的位置;和分别表示船舶i在时间t时的速度和航向。类似地,表示在时间t时另一艘船j的位置;和分别表示时间t时船舶j的速度和航向。在t时刻,船舶i相对于船舶j的相对速度,由表示,可由下式计算得到
在t时刻,船舶i和船舶j之间的距离,由表示,可由下式计算得到
图3.船舶位置和船舶碰撞之间的关系
如图3所示,令为相对速度和两船连线之间的角度。角度可由下式计算得到:
如果在下一个时间间隔船舶i不进入船舶j的区域,在时刻t时的最小航行距离可通过下式计算得到:
因此,船舶i和船舶j在时间t将会碰撞如果吓死成立:
以下有三种船舶碰撞类型:
- 追越碰撞。 追越碰撞指的是两艘船舶在同一条航线上行驶,几乎处于同行航线上导致的碰撞。追越的航线差异不应超过10°(Montewka et al.,2010)。
- 正面碰撞。 正面碰撞指船只几乎位于相反的航线航行,航线差异在170°到190°范围内导致的碰撞。
iii) 交叉碰撞。 交叉碰撞指碰撞的两艘船之间的航线差异落在10°-170°或190°-350°的范围内。
应该指出的是,本研究中使用的航线分类是不同于“国际海上避碰规则”中的规定的。本研究采用航线分类方案(Montewka et al。,2010),因为这种分类方案与COLREGS相比可能略微高估碰撞风险。 鉴于新加坡海峡的高安全性要求,使用这种保守的航线分类是合理的。由于船只可能遇到以上所有三种船舶碰撞类型,船舶碰撞频率可以估计为:
其中:
: 追越局面次数
: 追越碰撞发生概率
: 正面局面次数
: 正面碰撞发生概率
: 交叉局面次数
: 交叉碰撞概率
4 结果和讨论
4.1 船舶交通特性
本节主要介绍涉及碰撞的船只特点。在新加坡海峡航行的船舶可以分为六类:一般货物船,散货船,液货船,液化天然气气体/液化石油气船(LNG / LGP),滚装船(RORO)/客船和集装箱船。基于我们一月的AIS数据,表1给出了在新加坡海峡航行的每个类别船只所占的百分比份额。从表1可以清楚地看到,集装箱占比最大(36.36%),其次是散货船(20·50%),然后是油轮(18·30%)。RORO /客船(4.77%)所占比例最小。
为了研究的两艘碰撞船舶的相对速度,可用@Risk软件(@Risk,2002)来拟合相对速度分布。这个软件使用卡方拟合统计量来衡量一个分布是否符合收集的数据。从中选择最合适的(具有最低的卡方统计量)。图4包括描述相对速度最佳拟合分布的三个图,其涉及三种不同类型的船舶碰撞。图4(a)显示威布尔分布最能描述追越碰撞的两艘船的相对速度。大多数船舶的相对速度(79.9%)在1到5节之间,平均相对速度约为3节。图4(b)表明正面碰撞船舶的平均相对速度为12节。图4中的三幅图证明正面碰撞船只的相对速度一般比追越碰撞和交叉碰撞
全文共7777字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16089],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

