英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
面向密集航区的星基AIS接收机
Sriram Jayasimha,Jyothendar Paladugula, Aditya Varma Gadiraju and Manoj Kumar Medam
Signion Systems
Hyderabad, India
摘要——一个星基船舶自动识别系统(S-AIS)接收器有很高的信息碰撞概率,通过可激活AIS的船舶,两者都有时间和频率,对于船舶稠密的地区来说。时间和频率选择探测器(它使用来自未冲突字段与干扰消除一起的船舶轨道)解码的冲突消息。算法适用于在线处理,具有增强消息和船舶的探测概率。
关键词:等多普勒区域,卫星,AIS,S-AIS,海事,检波,综合解码
I. TNTRODUCTION
船舶自动识别系统(AIS)信息包括1分钟的帧,每一个2250个时分的多个访问(TDMA)26.67 ms槽,超过两个AIS频率,161.975(AIS-1)和162.025(AIS-2)MHz,通过半波长/2)偶极子,是为40海里直径的区域设计的(称为自组织TDMA一SOTDMA一region)。那SOTDMA协议确保了消息避碰在这个区域内。在一分钟内,最大的信息接收到的两个AIS频率是4500[1]。
作为低地球轨道卫星(LEOS)视域(FOV)拥有数百个SOTDMA区域,AIS卫星收到许多冲突消息。冲突更可能发生在广泛的海岸带或海湾,这里有许多装备有AIS功能的小型设备。在高度950公里的LEOS的链路规划中[1],甚高频12.5W同向辐射能量发射机(EIPR),最大倾斜距离为3606公里,每比特能量对噪音的谱密度(Eb/N0)为8.3dB。S-AIS信息解码是有限的干扰(而不是噪音)。
然而,国际电联最近的一份报告[2]则提出了改进的S-AIS(例如使用特殊消息27、特殊消息报告间隔,除AIS-1和AIS-2以外的频率 (仅检测A类船舶),我们提出了一种新的接收机结构,用于当前的AIS消息,该消息适合于船上的LEOS。 本文的其他部分包括:AIS的特征 FOV密集的LEOS接收到的信号认可机构启用的船舶(第II节);频谱除碰撞(SD)星载处理(SDPOB)1,例如[3,4]通过非相干处理并行解调结构中的解调器(第三部分) (第四节);高度和中度的解码/验证信息第五节中的信号干扰加噪比(接收器);解码消息的干扰消除(IC)从较弱碰撞的AIS信号中提取信息 (第六节);Leos捕获的总体系统性能 数据-样本(第七节)。
我们的SDPOB增强了消息解码,消除了下行链路多普勒补偿,降低了下行链路功率带宽,减少了数据检测和融合的延迟。我们的接收器能使许多符号的时间和频率-偏移量(不像[5]),使用低复杂性的综合症解码,基于轨迹的验证,IC和它的参数化的相干性检测(CD)。然而,它无法解码罕见的碰撞在OdB附近的信息,在那里有一个AIS探测器波形形状[6]。解决源方向恒模算法[7]。然而,卫星角1-2 SOTDMA单元的分辨率需要一个天线阵列更多的元素,在VHF,而不是立方体卫星可以容纳。
II. LEOS-RECEIVED AIS-SIGNAL DOPPLER/DELAY SPREAD
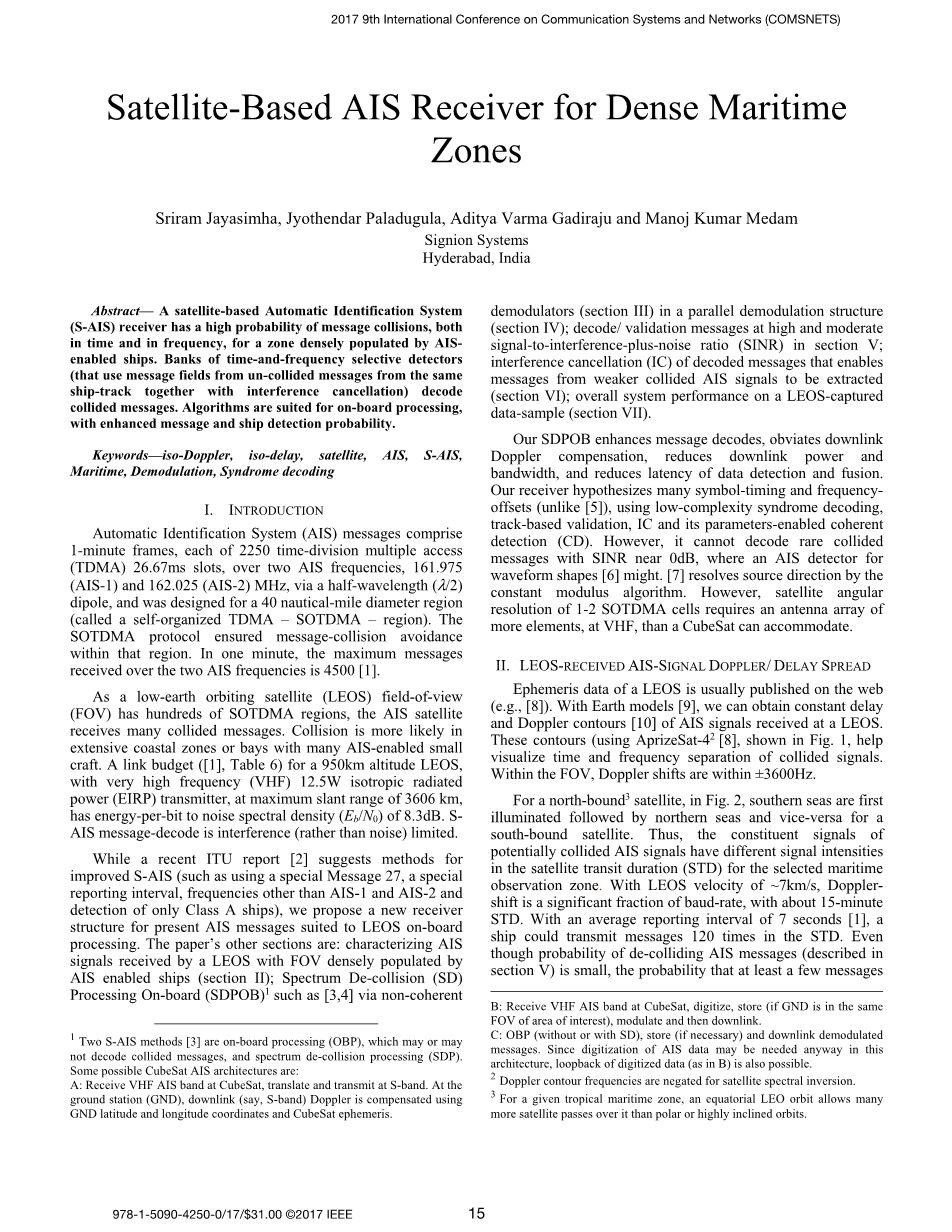
星历表的数据通常是在网上发布的(例如,[8])。有了地球模型[9],我们可以得到持续的延迟在LEOS中接收到的AIS信号的10个信号。这些轮廓(使用4-42 8,如图1所示,帮助可视化时间和频率分离的碰撞信号。在FOV中,多普勒偏移在plusmn;3600Hz。
对于一个向北航行卫星,图2,南海是第一个被北行卫星覆盖,反之亦然。因此,构成了可能碰撞的AIS信号有不同的信号强度在选定海域的卫星过境期间(STD)观察区。有了LEOS的速度是7km/s,多普勒-轮班是波特率的一个重要部分,大约15分钟平均报告时间为7秒[1],a船舶可以在STD中传输120次信息。尽管有可能发生反碰撞的AIS信息(在第五节)很小,至少有几条消息的概率在STD轨道中由给定的ship传输是正确的收到高。这就增加了解码概率在它的STD轨道上,同一艘船的其他碰撞信息。
反碰撞依赖于信号强度的变化(对1000公里高度的卫星有显著的影响)LEO S-AIS接收器中的多普勒。A类和B类-卫星链路边缘与低轨道的距离不同卫星图1的卫星位置[1]显示在图3中(A)。在直径6562公里的FOV中可以看到8分贝的变化。(即。从亚卫星点到3281公里的表面范围)。A无线电模型预测地球卫星传播损失1显示周期性的增强和衰退,由于内相和从水的反射路径中加入反射路径表面。图3(b)中的这个模型显示了1dB附近的变化子卫星指向FOV边缘的2dB;进一步8分贝当A类和B类船只出现时就会发生变化
III. DELAY AND FREQUENCY OFFSET SENSITIV ITY OF NON-COHERENT ATS RECETVER
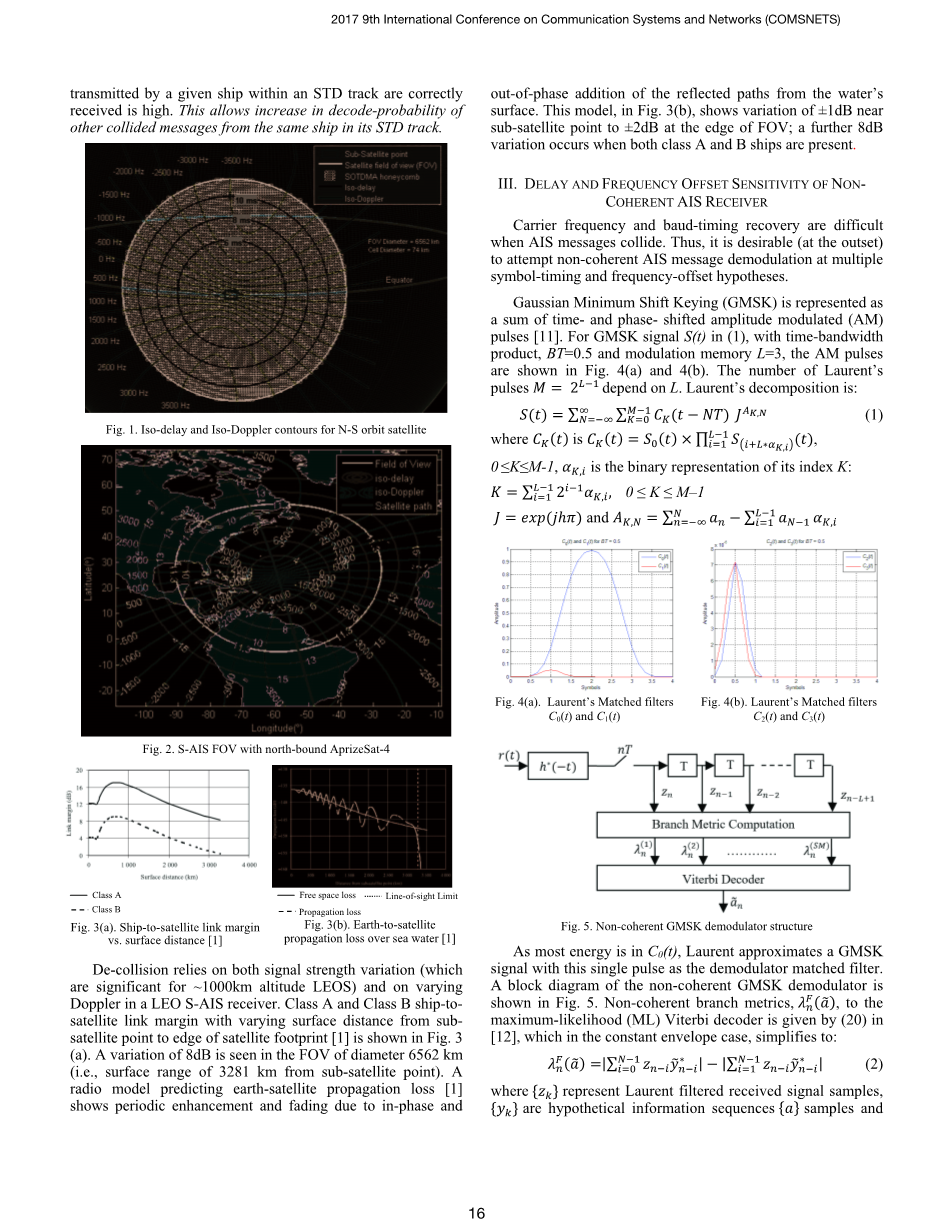
当AIS信息发生碰撞时,载波频率和时间选择的恢复是困难的。因此,在开始时,在多个目标中尝试非相干的AIS信息解调定时偏移和频偏的假设这是可取的。高斯最小移位键控(GMSK)被表示为时间和相移的调幅(AM)的总和脉冲[11]。对于(1)的GMSK信号S(t),有时间带宽乘积,BT=0.5和调制记忆L=3,AM脉冲如图4(a)和4(b)所示。劳伦的数量根据l.Laurent的分解,脉冲M=2L-1是:
由于大多数能量都在C0(t)中,Laurent近似于一个GMSK用这个脉冲信号作为解调匹配滤波器。非相干的GMSK解调器的框图是图5所示。非相干分支度量lambda;FN(atilde;),到最大似然(ML)维特比解码器由(20)在恒定的包络情况下,简化为:
{Zk}代表Laurent过滤接收的信号样本,{Yk}是一个假设的信息序列一个样本,N是隐式相记忆。分支的模量——度量标准4的计算允许忽略阶段(假设持续相位除以N)。维数比译码器输出是估计的数值。
一个最大-后验(映射)碰撞恢复方法[13]有接近相同的频道系数,被认为是只是比一个ML的维特比译码器稍微好一点Eb / N0;因此选择后一种方法(使用IC)。
图6显示了非相干的GMSK接收机性能。使用的参数是BT=0.5,L=3,和N=6的信号取样于6个样品/波特。在频率上完美匹配波特时间的最佳表现。比较了使用BPSK和微分BPSK(DBPSK)性能。那在两个频率偏移量(200赫兹和400赫兹)上观察到B=4波特时间偏移量( 1/6-1/6, 1/3和1/3)。性能下降,频率不匹配或波特时间错误(图6):
(1)位错误率(BER)性能随着内隐相记忆(N)增加,(曲线移动接近DBPSK性能)。
(2)增加N会增加接收机的复杂性(通过增加维特比解码器中的状态数)。
(3)增加N会减少可容许的频率偏移量(因为更小的频率偏移允许相位保持大约在N波特的持续时间内);因此,我们有更好的频率选择性接收器的复杂性和接收器的数量。
(4)使用频率偏移的性能下降大小和时间偏差。
图7显示了非相干的接收机性能干扰功率为3.5 kHz频率偏移。我们观察到:
(1)当干扰信号的频率间隔更大将使性能改善。
(2)在干扰和需要之间的时间偏移信号对性能的影响不大。分支的标签跨越N符号;因此,对于N=6,一个1/2波特偏移将主要的分支度量减少了17%。
(3)干扰信号功率相等时性能差不大。随着SINK的增加,干扰比性能提高了2 dB和5dB 如图所示:
最大的多普勒和功率变化出现在FOV被认为是评估S-AIS接收器的性能指标。在图8中,干扰信号的载波频率从主信号消失了,从0到最大多普勒800赫兹的步骤,在SINK=6dB。在一个典型的 Es/No=18dB中最大多普勒的干扰,是2e-3相同的数据包错误率(PER)是0.401。如果干扰的频率更接近于显性信号,这个BER大约是1.5e-2(PER=0.9791)。
使用加了白高斯噪声(AWGI)的错误发生在高信噪比(SNRs)的情况下在相同的信干扰比(SIRS)中,由于单一干涉伯努利分布。对于连贯和非-相干解调,干扰(与之相同的频率信号)公差(带均匀分布的烧裂干涉阶段)在高的时候比同等的要有更好的噪声容限,如图9所示。
IV. MESSAGE DE-COLLIDINGAIS-RECEIVER ARCHITECTURE
图10显示了AIS-1的两种S-AIS接收器(161.975兆赫)或AIS-2(162.025兆赫)。最大视场多普勒是50 kHz通道分离的8%。接收方不使用波特-计时和/或频率偏移估计;相反,在所有的波特中,一个并行的解调结构(PDS)偏移量(即对于每个波特数的样本数等于6,0/6,hellip;,5/6的Laurent脉冲C0样本)和21个频率区(0赫兹,plusmn;400 hz,hellip;,plusmn;3600 hz,plusmn;4000 hz),覆盖了FOV的最大多普勒,被使用(126个并联解调器)。由于每个解调器的频率都是200Hz(图6),所以频率区域被抵消了。
V.S-AIS MESSAGE CORRECTION AND VALIDATION
信息通过循环冗余校验进行验证(CRC,在这种情况下CRC一16[14])。当CRC匹配,消息几乎肯定是正确的并插入到一个组中消息列表。当CRC不匹配时(例如,当碰撞出现),综合症解码尝试信息校正(稍后详细)。两个错误可以更正为[15]显示a(255,239)BCH码与汉明距离5。纠正消息存储在组ii中(组i的副本或消息)相撞。如果错误是不可改正的,那么消息就是存储在3组,如图11的流程图所描述。
图12显示了带有固定字段的AIS信息结构包括8位全零的增升序列,24位序文序列(交替1,0),8位开始和结束标志序列0,1,1,1,1,1,1,0和24位缓冲区。168位数据由船舶信息组成,如海上移动服务标识(MMSI),经度,纬度,时间戳,速度超过地面(SOG)和其他信息。大多数领域是动态的,不像MMSI,它是固定在一个给定的容器上的。
帧检查序列(FCS)是在168位上计算的数据字段使用CRC-166。为了避免错误检测开始和结束标志,184位数据是位填充的,也就是五连续的,加上0。缓冲领域组成所有的0都能适应增加的长度(通过减少相应的缓冲区)并可以补偿延迟和延迟系统中装配。调制在之前的8位增强序言,在结尾的时候被8位的位可变长度的缓冲区。在接收端,开始之间的数据最后的标志是位无填充的,如果CRC校验过,在序言和FCS之间的数据块被解析。
一艘船的信息,嵌入在高级数据链中图12中的控制(HDLG)数据包是不返回到零的(NRZ-I)编码(即,在0处切换开关)。图13显示NRZ-I编码位,转换为[-1, 1]级,是GMSK调制,它固有的差分编码数据(尽管预编码人员可以直接传递数据,AIS应答器不会这样做)。作为非相干性的解调本质上执行微分检测,对偶错误是由错误事件引起的。NRZ-I解码器(过去在最后,也会导致双重错误,但是被一个正确解码的钻头分开。一个双重错误可以通过辨证解码[17]来纠正。有两个或者更少的双重错误(4位错误),这种综合症并不是单一的7;因此,所有双双错误模式都是不可纠正的。单表1显示了双重错误模式统计数据。
表1显示了任何位置的单个双重错误可修正的,最多有两个双重错误被修正概率0.744;由此,每个的问题都有改善解码(在包中假设常量)如表2所示,其中n=184使用MMSI和n=154的轨迹取代MMSI,如下:
PRR with two or less dual error corrections
作为单一双误的综合症可能是相同的两个双误,我们选择了一个双错误解码(更确切地说这两个双重错误)是很有可能的。
从最坏的情况得出的计算结果是悲观的原因是,首先,当SIRgt;5.5分贝时,PER较低(图9);第二,当信息包有两个或多个错误时部分发生碰撞;因此,PER通常小于表2的值。因为传播延迟在FOV中只有2.7-11.3 ms。在26.67 ms的割缝框架中,双碰撞有两种类型:
a)与a发生碰撞的消息转移相邻槽(最多为8.6毫秒)
b)几乎完全的信息冲突,26.67毫秒,18.07 ms重叠)
组-II消息通过对组-I的检查来验证数据:消息的纬度/经度是否在卫星的FOV,并与它被检测到的多普勒相匹配(图10)。其他的消息字段检查分类如图14所示,将信息分为三个列表。虽然序文序列是已知的,它在验证中没有使用解调器的维特比译码器正在处理这一时期。逻辑的流是由错误的检测和错误报警统计数据集。
对于基于轨迹的处理(图14的第三个问题流程图),我们缓冲(在卫星上)组-I和组-II信息(在图14中传递前两个问题的信息)周期T(20秒)。列出消息跟踪-基于可寻的MM
全文共11469字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9668],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

