
英语原文共 5 页
使用Web /移动应用程序的ROBODEM远程监控系统
Tasneem M. Yousif, Aysha K. Alharam
巴林大学计算机工程系
麦纳麦,巴林
[Tasneemyousif&Ayshaalharam @ hotmail.com]
Wael Elmedany, Abeer A. Al khalaf, Zainab Fardan
巴林大学计算机工程系
麦纳麦,巴林
摘要:
本文介绍了一种利用网站和移动应用程序检测爆炸性气体的远程监控系统。ROBODEM(ROBOt Detection Explosive Materials)系统旨在开发由LEGO Mindstrom NXT机器人处理的遥控爆炸性气体检测系统。主控制器采用arduino uno微控制器设计。该机器人配备了用于实时视频流的IP摄像头,使用MQ6和MQ5传感器的气体检测系统,以及用于实时跟踪的GPS接收器。该机器人可以在室内使用蓝牙或室外使用互联网进行控制。系统提供有关ROBODEM的信息,例如传感器结果,机器人的当前位置,当前时间和日期。如果有爆炸性气体泄漏,该系统会发出警报并在网站上显示一个弹出窗口。ROBODEM对Google地图中显示的机器人路径进行实时跟踪。原型已经过实验测试,并对结果进行了分析和讨论。
关键词: LEGO; arduino; GPS; Tracking; ROBODEM
Ⅰ.介绍
爆炸性材料对人类和环境来说太危险,人们可能会因此死亡,建筑物可能因此而受损[1]。它们会产生有毒气体,对我们的宇宙产生非常不利的影响。爆炸性和有毒气体非常危险,特别是对那些在石油和天然气方面有重要作用的公司,以及那些需要确保周围区域在关键工作之前是安全的电站。此外,有一些石油勘探区域应该确保安全,不应该有爆炸性气体存在。此外,危害房屋的有毒气体泄漏在很大程度上可能导致许多无辜的人和儿童死亡[2]。因此,作为这些材料的一部分的爆炸性气体应引起我们的注意。ROBODEM是一种爆炸性气体检测系统,通过遥控机器人上的实时视频流摄像机,找到机器人的确切位置,传感元件组成的强大系统,用于检测环境中爆炸性气体的百分比检测。该系统由六种基础技术组成:LEGO Mindstrom NXT机器人,GPS,GSM / GPRS,蓝牙防护罩,IP摄像头和气体传感器。
GPS设备负责确定机器人位置坐标:经度和纬度[3] .GPS模块还根据确切的时间和日期为我们提供跟踪机器人[4]。跟踪设备控制器处理来自GPS的这些坐标并在数字地图上产生位置点。GPRS屏蔽为用户提供了一种方式使用GSM手机网络能够向远程位置传输数据或从远程位置传输数据。GPRS [5]模块负责将用于控制机器人的确切命令从服务器发送到NXT装置/ LEGO 中心,从GPS模块接收位置数据,并再次从传感器接收传感器数据到服务器。对于实时视频流和监控机器人的运动,则使用IP摄像机记录[6]。该智能检测系统基于诸如MQ6和MQ5传感器等气体传感器。[7]。
这项研究的主题是一个技术机器人设备,可以通过智能手机或基于网络的应用程序在人类无法到达的任何位置移动和远程控制系统,可用于检测爆炸性材料并感知任何可能的气体泄漏伤害人的生命。因此,这个机器人将保护社会免受物理和人类损失。ROBODEM系统还提供危险条件的早期预警;它提供了干预和纠正的时间,这是在危险气体泄漏的地区撤离和通知重返大气层的机会。ROBODEM是通过使用智能移动应用程序和网站中代表的不同技术设计的,可以方便个人或公司使用的一个系统。ROBODEM系统可以通过摄像头在RC车和RC直升机中进一步实施以此保护环境。
在本文中,ROBODEM架构在第二部分中介绍。在第三部分中,将介绍硬件实现。最后,第4节介绍结论和未来的工作。
Ⅱ.系统架构
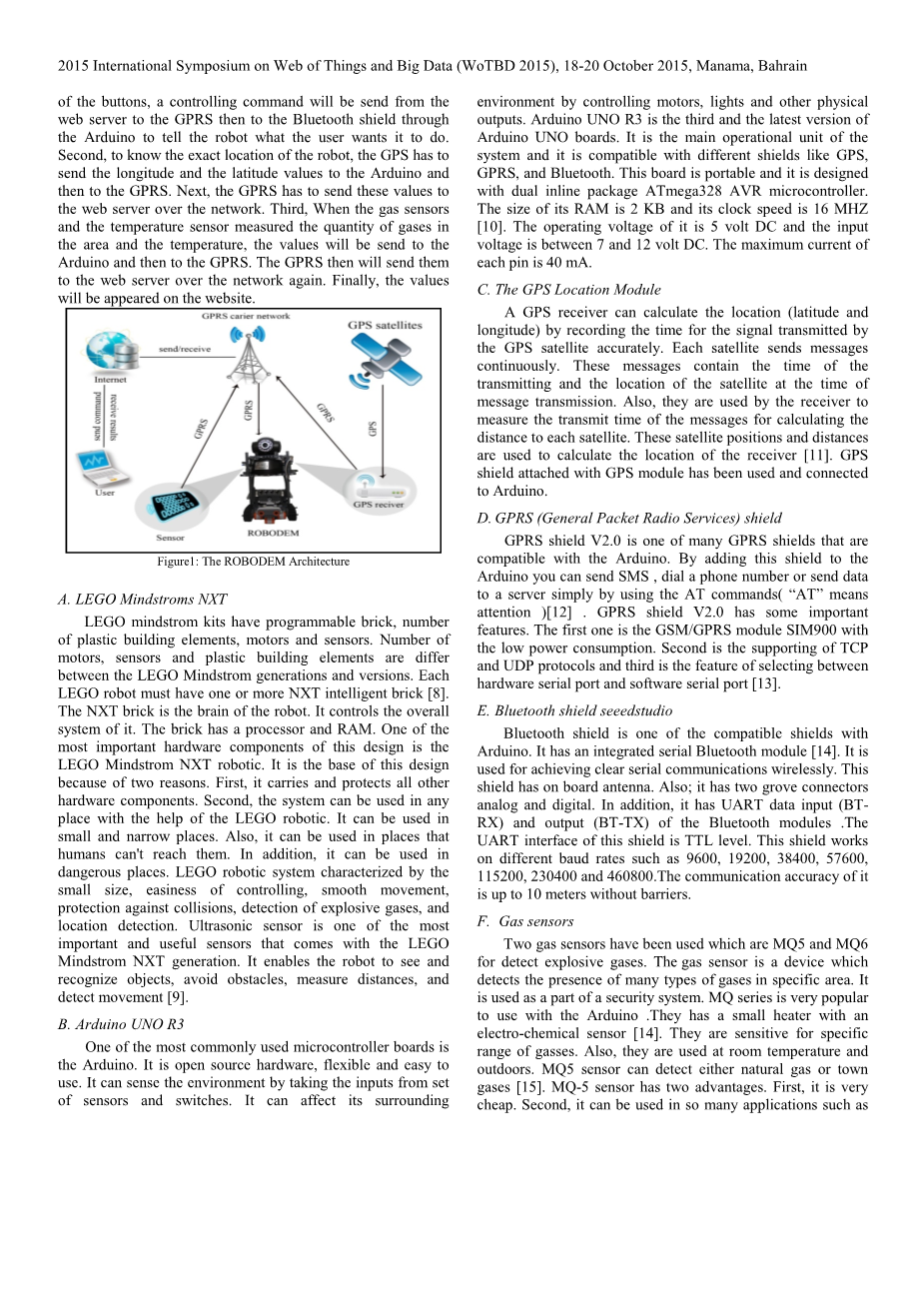
图1展示了用于在机器人和监控服务器之间传递数据的网络系统架构。该系统仅检测一部分气体爆炸性材料。气体检测系统将放置在LEGO机器人上,该机器人具有用于实时视频流的IP摄像头,用于位置检测的GPS以及具有用于室外控制的GPRS屏蔽的蓝牙屏蔽。该系统将遵循以下步骤以检测爆炸性气体。首先,LEGO机器人将在室内使用移动应用程序进行控制,或在室外使用网站进行控制。如果用户决定在室外控制机器人,则蓝牙防护罩必须在控制之前首先连接到LEGO。在蓝牙防护罩和NXT之间设置蓝牙连接后,用户必须单击网站控制页面中的五个按钮中的任何一个,以移动机器人或停止其移动。当用户点击一个按钮时,控制命令将从Web服务器发送到GPRS,然后通过Arduino发送到蓝牙屏蔽,告诉机器人用户想要它做什么。其次,要知道机器人的确切位置,GPS必须将经度和纬度值发送到Arduino然后再发送到GPRS。接下来,GPRS必须通过网络将这些值发送到Web服务器。第三,当气体传感器和温度传感器测量区域内的气体量和温度时,这些值将被发送到Arduino然后发送到GPRS。然后,GPRS将再次通过网络将它们发送到Web服务器。最后,数值将显示在网站上。
图1:ROBODEM架构
- LEGO Mindstroms NXT
LEGO mindstrom套件具有可编程装置,一定量的塑料建筑元件,电机和传感器。LEGO Mindstrom代数和版本的电机,传感器和塑料构件的数量不同。每个LEGO机器人必须有一个或多个NXT智能装置[8]。NXT装置是机器人的大脑核心。它控制着它的整体系统。装置有处理器和RAM。这种设计最重要的硬件组件之一是LEGO Mindstrom NXT机器人。它是这种设计的基础,原因有两个。首先,它承载并保护所有其他硬件组件。其次,该系统可以在LEGO机器人的帮助下在任何地方使用。它可用于狭小的地方。此外,它可以用于人类无法触及的地方。此外,它可以用于危险的地方。LEGO机器人系统的特点是体积小,易于控制,运动平稳,防撞击,爆炸性气体检测和位置检测。超声波传感器是LEGO Mindstrom NXT一代附带的最重要和最有用的传感器之一。它使机器人能够看到和识别物体,避开障碍物,测量距离并检测运动[9]。
B. Arduino UNO R3
最常用的微控制器板之一是Arduino。它是开源硬件,灵活且易于使用。它可以通过传感器和开关组的输入来感知环境。它可以通过控制电机,灯和其他物理输出来影响它的周围环境。Arduino UNO R3是Arduino UNO板的第三版也是最新版本。它是系统的主要操作单元,兼容GPS,GPRS和蓝牙等不同的防护装置。该板是便携式的,采用双列直插式ATmega328 AVR微控制器设计。RAM的大小为2 KB,时钟速度为16 MHZ [10]。其工作电压为5伏直流,输入电压为7至12伏直流。每个引脚的最大电流为40 mA。
C.GPS定位模块
GPS接收器可以通过准确地记录GPS卫星发送的信号的时间来计算位置(纬度和经度)。每颗卫星都连续发送消息。这些消息包含发送时间和发送消息时卫星的位置。此外,接收器使用它们来测量消息的发送时间,以计算到每个卫星的距离。这些卫星位置和距离用于计算接收器的位置[11]。已连接GPS模块的GPS防护罩已使用于Arduino。
D.GPRS(通用分组无线业务)屏蔽
GPRS屏蔽V2.0是与Arduino兼容的众多GPRS屏蔽之一。通过将此屏蔽添加到Arduino,您只需使用AT命令(“AT”表示注意)[12]即可发送短信,拨打电话号码或将数据发送到服务器。GPRS屏蔽V2.0具有一些重要功能。第一个是具有低功耗的GSM / GPRS模块SIM900。第二是TCP和UDP协议的支持,第三是硬件串口和软件串口之间的选择[13]。
E.蓝牙屏蔽
蓝牙屏蔽是与Arduino兼容的屏蔽之一。它有一个集成的串行蓝牙模块[14]。它用于无线地实现清晰的串行通信。这个屏蔽有天线。而且它有两个插槽连接器模拟和数字。此外,它还具有蓝牙模块的UART数据输入(BT-RX)和输出(BT-TX)。该屏蔽的UART接口为TTL电平。该屏蔽适用于不同的波特率,如9600,19200,38400,57600,115200,230400和460800。其的通信精度高达10米而无障碍。
F.气体传感器
MQ5和MQ6两个气体传感器,已经用于检测爆炸性气体。气体传感器是检测特定区域中存在多种气体的装置。它用作安全系统的一部分。MQ系列传感器非常适合与Arduino一起使用。MQ系列传感器有一个带电化学传感器的小型加热器[14],对特定范围的气体敏感。此外,MQ系列传感器均可在室温和室外使用。MQ5传感器可以检测天然气或城市气体[15]。MQ-5传感器有两个优点。首先,它非常便宜。其次,它可以用于如此多的应用中。“家用气体泄漏检测仪,工业可燃气体检测仪和便携式气体检测仪”。MQ6是一种半导体气体传感器,可检测特定区域的气体泄漏。[16]。这种类型的气体传感器对LPG,丙烷和丁烷具有敏感性。它对香烟烟雾的敏感度也很低酒精[17]。MQ-6气体传感器具有良好的响应时间。
Ⅲ.硬件植入
该设计由六个硬件组件组成。这些组件包括LEGO Mindstrom NXT结构,Arduino和GPRS系统,室外控制系统,跟踪,实时视频流和智能检测系统。
A.LEGO Mindstrom NXT结构
Educational LEGO Mindstrom NXT套件用于构建系统的基础。使用近40个塑料元件,一个NXT装置,一个超声波传感器和三个电机来构建图2所示的LEGO Mindstrom NXT机器人.IP摄像机从顶部放置在机器人的中间,成为机器人的眼睛探测周围的所有地方。其他硬件组件放置在机器人上。
B.系统的基础(Arduino Uno和GPRS)
这项研究的目标是基于从GPS,传感器到互联网上的Web服务器的许多方面传输数据。为了实现这一目标,需要GPRS屏蔽,SIM卡连接到良好的微控制器。选择Arduino Uno R3有几个原因说明[10],例如,它是一个开源的,易于使用,因为它易于学习它的软件并且它与所使用的屏蔽兼容。选择Arduino Uno板具有合适的成本,并且具有合适的尺寸和足够数量的端口,可用于设计的其余硬件组件。
C.连接GPRS屏蔽与Arduino Uno R3
GPRS屏蔽为用户提供了一种使用GSM手机网络能够向远程位置传输数据的方法,首先将VIVA SIM卡插入GPRS屏蔽的SIM卡座[18]。其次,将GPRS屏蔽层叠到Arduino上并正确插入引脚,以便硬件串行引脚(01)GPRS分别插入Arduino的引脚(D0和D1)。D0将用作硬件串行的Rx(接收器),而D1将用作Tx(发送器)。此外,GPRS屏蔽软件系列的引脚(7和8)将分别插入Arduino的(D7)和(D8),其中D7用作软件串行的Rx,D8用作Tx。除此之外,D9用于为SIM900供电。图3显示了GPRS如何从两侧连接到Arduino。
D.连接蓝牙屏蔽与GPRS屏蔽
通过将蓝牙屏蔽插入GPRS屏蔽来连接屏蔽。GPRS屏蔽的引脚D5和D6以及Arduino用作软件串行端口。这些引脚分别与蓝牙屏蔽引脚(5和6)连接用于与硬件串行端口(D0和D1)通信。图4显示了如何将蓝牙屏蔽添加到系统中。
图2:LEGO MindStrom NXT机器人的形状
图3:通过Arduino连接GPRS Shield
图4:将蓝牙屏蔽添加到系统
E.控制系统工作的方式
为了通过蓝牙通道控制LEGO机器人的装置块,需要使用LEGO Mindstrom NXT特有的通信协议。图5显示了协议电报的体系结构。字节0包含电报类型。有三种类型的电报,即直接指令电报,回复电报和系统指令电报。出于此设计的目的,仅使用直接命令和回复命令。表1显示了一些带有类型的重要命令。其他字节由命令本身和基于回复组成在电报类型上。直接命令的大小有限这是64字节,包括电报类型的字节。还有两个字节未包含在大小限制中,它们应位于蓝牙消息的前面。这两个字节应包含消息中的字节数。
图5:LEGO Mindstrom NXT蓝牙协议的通用架构
表1:具有类型的重要命令
F.连接GPS护罩与系统
SparkFun GPS防护罩的位置将位于系统的顶部。只需将GPS插入蓝牙屏蔽并正确插入引脚。在顶部添加GPS屏蔽的原因是Arduino的引脚2和引脚3仅用于设置GPRS的串行模式。这就是为什么我们不能用它们来设置GPS序列。为了解决这个问题,我们需要弯曲两个引脚GPS引脚(引脚2和引脚3)不连接并插入另外两个引脚而不是折弄GPS引脚,然后引脚(2)与GPS屏蔽引脚9连接,引脚(3)与引脚10连接设置GPS的软件串行模式。图6显示了GPS屏蔽与系统的连接。
图6:将GPS护罩连接到蓝牙上
G.MQ6传感器的硬件部分
MQ6传感器有一个与Arduino一起使用的屏蔽。该屏蔽具有使用该传感器所需的所有电路。屏蔽只有3个引脚(Vcc,GND和Vout)与Arduino连接。Vcc引脚连接到Arduino中的 5V。这是需要与传感器加热器连接的电压。GND引脚连接到Arduino中的GND作为接地引脚。Vout引脚连接到A0(Arduino的模拟输入)[18]。在GPS屏蔽的顶部将此传感器连接到系统中,如图7所示。传感器在洁净空气中提供大约100 mv的读数,然后输出电压由于气体量增加而增加。传感器产生电流,然后需要负载电阻来测量电阻器上的电压,该电压将指示气体的浓度。该阻力
资料编号:[5859]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

