
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
关于卸船作业中岸桥和集卡的集成调度研究
摘 要
为了降低船舶转运时间,岸桥、集卡和场桥等设备进行良好的协调作业是至关重要的。大多数研究都试图独立地优化这些设备的作业过程,但由于岸桥和集卡的作业是高度耦合的,因此必须以集成的方式处理这些作业,这是海运集装箱码头的特点。本研究开发了一种混合整数规划模型,用于联合调度岸桥和集卡。该集成模型明确地考虑了实际操作中的约束,如集装箱之间的优先关系、阻塞、岸桥的干扰、岸桥的安全界限。为了求解该模型,提出了一种结合了贪婪算法的遗传算法(GA)。结果表明,从该模型中得到的解决方案优于非集成模型,且能够在合理的时间内得到结果。
关键词:海运集装箱码头;岸桥调度;集卡调度;混合流水车间调度;遗传算法
第1章 绪论
在过去十年,集装箱化在急剧增长。联合国贸易和发展会议(UNCTAD,2012)指出,2011年,全球集装箱贸易(以TEUs,twenty-foot equivalent units,为单位)增长了7.1%,世界集装箱吞吐量增长了5.9%,达到了2011年的最高水平(57280万TEUs)。海运集装箱码头通过提高服务水平来应对这种集装箱贸易的增加。对于操作人员来说,最关键的目标是降低船只的周转时间(即船只在港口的总时间)。
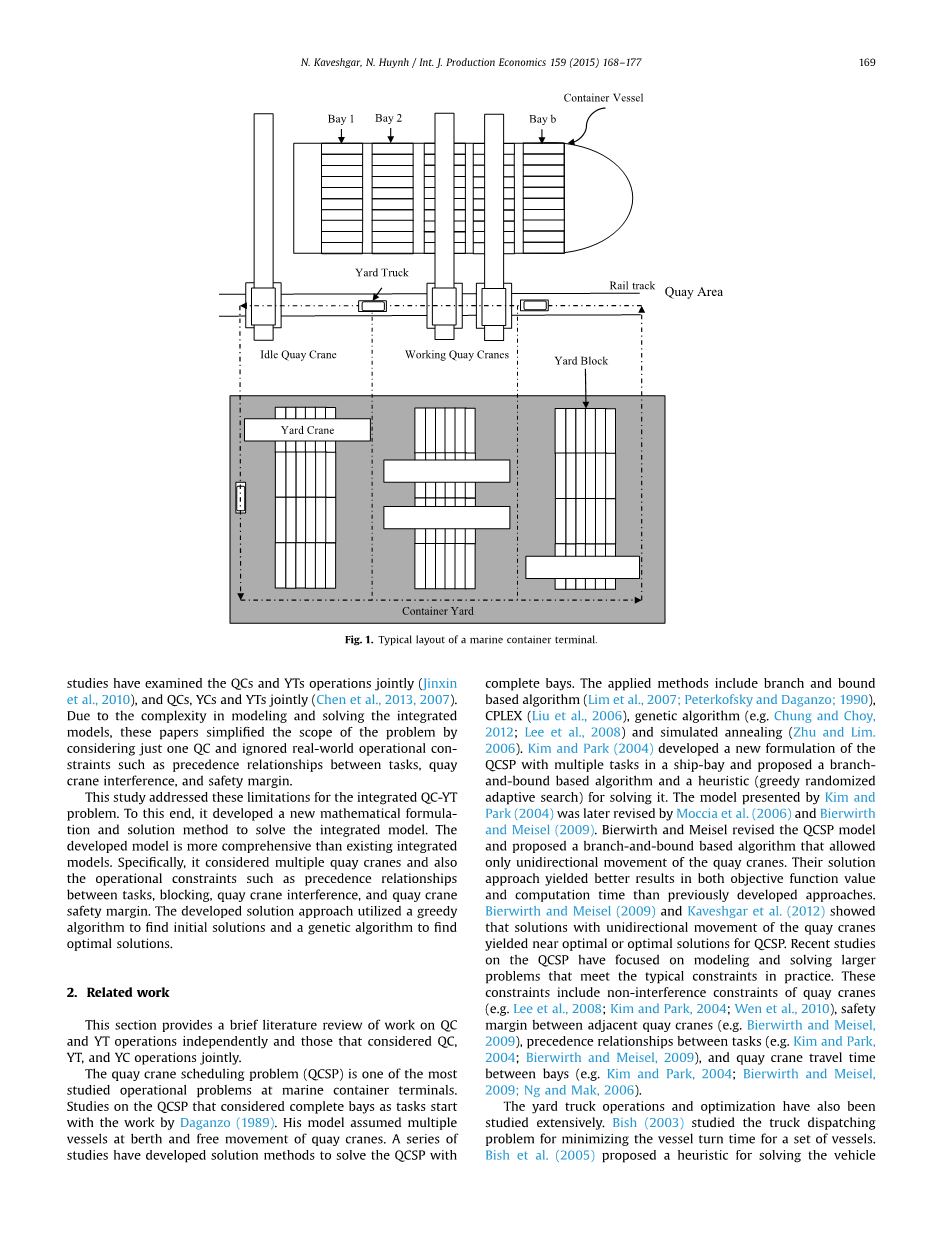
图1为典型的海运集装箱码头布局图。它包括靠海边的泊位和用于存放集装箱的堆场。其中,堆场一般6个宽,4个高,40TEU长。
图 1典型海运集装箱码头布局
如图1所示,主要有三种集装箱搬运设备:码头起重机(岸桥,QCs)、堆场起重机(场桥,YCs)和集装箱码头卡车(集卡,YTs)。岸桥负责船舶上的集装箱装卸,场桥负责堆放和回收出口和进口集装箱,集卡负责在岸桥和场桥之间运输集装箱。船舶上的集装箱通常根据卸货港、集装箱大小和集装箱重量进行分组。这些集装箱组(即被称为任务的进港/进口集装箱)通常位于船舶邻近码头一侧。一旦船只安全停泊在码头区域,卸船作业就开始了。卸船作业包括三个阶段:岸桥从船舶上卸下集装箱并将其装到集卡上;集卡将集装箱运输到场桥;场桥将集装箱堆放在指定区域内。这三个阶段的任何延迟都会增加整艘船的周转时间。因此,必须协调这些过程之间的任务调度。
大多数研究都是独立进行岸桥、场桥和集卡作业的优化。关于岸桥调度的研究(QCSP)试图确定每一个岸桥的任务顺序,以最小化船舶周转时间或所有岸桥完成其指定任务的最迟时间(即最大完工时间)。多年来,随着研究人员试图解释现实世界的约束,QCSP变得越来越复杂,如集装箱组的优先关系、岸桥的干扰和安全界限。针对场桥部署问题的论文试图优化场桥作业和其在集装箱堆场之间的移动,以最小化船舶作业和(或)集卡的延误。针对集卡调度的研究包括:双循环、序列相关作业、阻塞、路径和集卡组大小。最近,随着计算机技术的发展,研究人员对岸桥、场桥和集卡作业的不同组合进行联合研究。特别是部分研究已经实现对岸桥和集卡作业的联合研究[[1]]及对岸桥、场桥和集卡作业的联合研究[[2]-[3]]。由于建立和解决集成模型的复杂性,这些论文简化了问题范围,只考虑一个岸桥和忽略实际操作中的约束,如任务之间的优先关系、岸桥干扰和安全界限。
本研究解决了集成QC-YT问题的局限性。为此,提出了一个新的数学公式和求解方法。该模型比现有的集成模型更全面。具体地说,它考虑了多个岸桥,以及任务之间的优先关系、阻塞、岸桥干扰和岸桥安全界限等操作约束。采用贪婪算法寻找初始解和遗传算法寻找最优解。
第2章 国内外研究现状
本节对前人工作进行了简要回顾,包括独立考虑岸桥和集卡作业的和联合考虑岸桥、场桥和集卡的。
岸桥调度问题是海运集装箱码头热点研究问题之一。关于QCSP的研究,将整个海湾作为研究对象是从Daganzo(1989)的工作[[4]]开始的。他的模型假设多艘船在泊位和岸桥间自由移动。一系列的研究已经找到QCSP的解决方案,应用方法包括基于分支定界的算法(如,Lim等(2007) [[5]]; Peterkofsky 和Daganzo(1990) [[6]]),CPLEX(如,Liu等(2006)[[7]]),遗传算法(如,Chung和Choy(2012) [[8]];Lee等(2008) [[9]])和模拟退火(如,Zhu和Lim(2006)[[10]])。Kim和Park(2004)开发了一种新的多重任务的QCSP的形式,并提出了一种基于分支定界的算法和一种启发式(贪婪随机自适应搜索)来求解它[[11]]。该模型后来被Moccia等 (2006)[[12]]以及Bierwirth和Meisel(2009)[[13]]修订。Bierwirth和Meisel修改了QCSP模型——只允许岸桥的单向移动,并提出了一种基于分支定界的算法。他们的解决方案在目标函数结果和计算时间上都比以前的方法更好。Bierwirth和Meisel(2009) 及Kaveshgar(2012)[[14]]表明,岸桥的单向移动能得到最优解或近似最优解。最近对QCSP的研究都集中在建模和解决更大的问题——实际中遇到的典型约束。这些约束包括岸桥的非干扰约束(如,Lee (2008)[9]; Kim 和 Park(2004)[11];Wen等(2010)[[15]]),相邻岸桥之间的安全界限(如,Bierwirth和Meisel(2009)[13]),任务之间的优先关系(如,Kim 和 Park( 2004)[11];Bierwirth和Meisel(2009)[13])和岸桥在海湾之间的往来时间(例如Kim 和 Park(2004)[11];Bierwirth Meisel(2009)[13];Ng和Mark(2006)[[16]])。
集卡的运行和优化也得到了广泛的研究。Bish(2003)研究了集卡调度问题,最大限度地减少了船舶周转时间[[17]]。Bish等(2005)提出了一种用于解决一个和多个岸桥的集卡调度的启发式算法[[18]]。他们的方法找到了针对一个岸桥的最优解和多个岸桥的近似最优解。Ng等(2007)研究了基于顺序处理的集卡的调度问题[[19]]。一些论文关注自动运输,如自动引导车辆(AVGs)、自动升降车辆(ALVs),还有自动化集装箱装卸码头设备的调度。Kim和Bae(2004)提出了一种前瞻性的调度方法来最小化AGV的行驶时间和岸桥的等待时间[11]。Nguyen和Kim(2009)针对ALV调度问题提出了一种启发式算法,将堆场的约束转换为时间窗约束[[20]]。ALV能够在没有起重机协助的情况下从堆场中提起集装箱。Kim和Kim(1999)开发了一个混合整数程序,用于优化海运集装箱码头的单转运起重机的路径。为了解决这一问题,提出了一种动态规划算法[[21]]。
近年来,多篇论文共同探讨了两个或两个以上的终端作业。Chen等(2007)提出了一种Tabu搜索算法,用于解决集装箱码头中岸桥、场桥和集卡的综合调度问题[2]。该问题被定义为具有优先级和阻塞约束的混合流车间调度问题(HFSS-B)。Zeng和Yang(2009)提出了一种用于岸桥、场桥和集卡的集装箱码头装卸作业调度的综合仿真和优化方法[[22]]。这个问题被定义为HFSS。优化方法搜索了求解空间,仿真模型对优化算法生成的结果进行了评价。
Jinxin等(2010)开发了一种从船舶中提取集装箱的数学公式[[23]]。这个问题是只考虑一个岸桥的两步流车间问题。卸下集装箱时,集装箱之间没有优先关系。作者提出了一种基于规则的启发式算法和一种求解该问题的遗传算法。Chen等(2013)制定了一体化岸桥、场桥和集卡等设备调度的约束规划模型,并提出了求解该模型的三阶段算法[[24]]。他们假设将集装箱任务分配给岸桥是预先确定的。Henry和Zhao(2008)提出了一种混合整数规划模型,用于岸桥、AGV和场桥的同步调度,并利用多层遗传算法解决了问题[[25]]。Meersmans(2002)在自动化集装箱码头开发了集装箱装卸设备(岸桥、AGV和自动场桥)的综合调度模型和算法,但只考虑了装船作业[[26]]。Vidovic和Kim(2006)认为集装箱码头是一个三阶段的物料搬运系统,在相邻的物料搬运设备之间没有缓冲区域。他们提出了一种基于概率理论的连续马尔可夫链模型和两种基于概率理论的近似数学模型,以估计三阶段物料处理系统的复合周期时间[[27]]。
针对以往的工作,本研究开发了一种基于混合流车间调度的数学模型。它通过考虑任务和多个岸桥之间的优先关系来扩展Jinxin等(2010)的工作。同时也加强了Chen等(2013),Zeng和Yang(2009),Henry 和 Zhao (2008), Meersmans(2002)以及Vidovic和Kim(2006)的工作,增加了岸桥的不干涉约束和安全界限。因此,开发的模型是第一个在集成问题中考虑多个岸桥、应用HFSS技术对集成QC-YT问题进行建模,同时考虑岸桥干扰和安全界限等作业约束。开发的公式是唯一的,在问题的第一阶段的决策变量(岸桥调度)使用了一组任务而不是单个任务。该方法大大减少了决策变量的数量,缩短了计算时间。
第3章 模型建立
集成QC-YT问题的目的是找到集装箱的设备分配(岸桥和集卡)和集装箱作业顺序,以最小化最迟完成时间,从而满足集装箱之间的优先级关系、阻塞、岸桥影响和安全界限。集装箱之间的优先关系要求
全文共13391字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12076],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

