英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
使用2D激光扫描仪和IMU辅助视觉SLAM进行实时3D制图
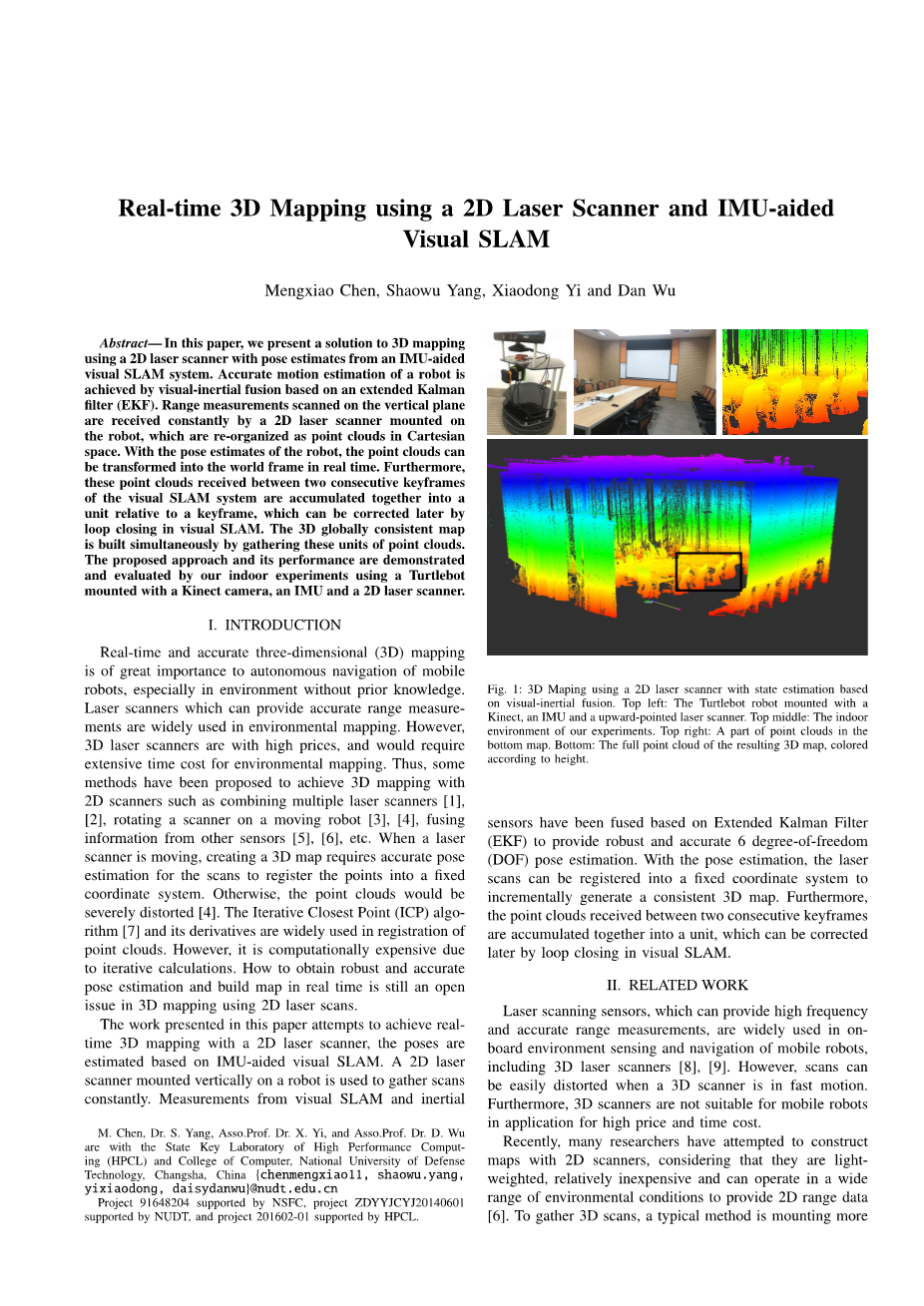
摘录——在本文中,我们提出一个用2D激光扫描仪和SLAM系统的IMU辅助位姿估计来完成3D建图的解决方案。扩展卡尔曼滤波的视觉惯性融合能够获得精确的运动判断。垂直平面的测距被连续获得通过2D激光扫描仪累积到机器人上,它能重建笛卡尔空间的点云数据。通过机器人的位姿判断,点云数据能被转换成世界坐标系。此外,视觉SLAM的两个帧之间的点云数据被累积到一个键架的单元,后来能够被视觉SLAM的闭关循环纠正。3D全局一致的地图是通过收集这些点云单元同时构建的。通过我们的室内实验:用一个安装了一个Kinect相机,一个IMU和一个2D激光扫描仪的Turtlebot,证明和评估了这种推荐的方法和它的表现。
一、介绍
实时和精确的3D建图是核心对于移动机器人的自动导航,尤其在没有先前知识的情况下。提供精确测距的激光扫描仪被广泛用在环境建图上。然而,高价的3D激光扫描仪要求大量的时间对于环境建图。因此,一些方法被推荐对于实现3D建图通过2D激光扫描仪[1],[2],像多个激光扫描仪的组合、在一个移动机器人上[3][4]旋转扫描仪、融合多个传感器的信息[5],[6]等。当激光扫描仪移动时,创建一个3D地图要求精确的位姿判断,以便在一个固定的坐标系中记录这些点。否则,这些点云数据被严重扭曲[4]。这个最近迭代点算法(ICP)[7]和它的派生法被广泛应用在点云数据的记录上。然而,由于重复的计算,使得计算复杂度非常大。怎样获得稳健、精确的位置判断,并能够实时建图仍然是一个有待解决的问题对于用2D激光扫描仪来完成3D建图。
图1:基于视惯性融合状态估计的二维激光扫描仪三维地图。左上方:高领机器人,安装Kinect, IMU和向上指向的激光扫描仪。右上方:实验室内环境,右上方:底部地图上的点云部分。底部:结果3D地图的全点云,根据高度着色。
本文中给出的工作方法尝试用2D激光扫描仪完成实时3D建图,位姿评估依靠IMU辅助的视觉SLAM系统来完成。一个垂直安装在机器人上的2D激光雷达扫描仪被用来完整地聚集这些点。视觉SLAM的测量和惯性传感器能够通过扩展的卡尔曼滤波融合来提供稳健、准确的6 DOF位姿判断。对于位姿判断,激光扫描仪能够被记录在一个固定坐标系来逐渐产生一个3D地图。除此之外,两个连续帧之间收到的点云数据被一起累计在一个单元,后来能够被在视觉SLAM的闭关循环中纠正。
二、相关工作
激光扫描传感器,它可以提供高频率和精确的测量,被广泛用在随车携带的环境感知和移动机器人导航上,也包括3D激光扫描仪[8][9]。然而,当3D扫描仪在一个快速运动中时,这些点能够被扭曲。除此之外,3D扫描仪的高价和大量时间不适合移动机器人。
最近,大量研究人员已经尝试用2D扫描仪来构图,认为他们时轻量的,相对便宜的,并且能够在一个广阔的环境状况下提供2D范围数据[6]。为了收集3D的点,一个典型方法是增加更多的扫描仪在一个移动平台。两个2D扫描仪被用时,虽然这个水平安装的建立了2D地图来恢复位置,并且这个竖直安装的的来扫描竖直方向的,这样来转换成点云数据。因为这个方法需要非常精确的运动判断并且不适应3维状况,研究人员尝试用一个旋转的2D扫描仪由马达驱使[3][4]。连续的旋转使2D扫描仪有大量的视野,然而,这导致了需要用复杂的机械配置。
其他传感器的融合信息能帮助2D激光扫描仪在3D建图中,当雷达测程法的扫描匹配被用来提炼这个判断和记录,在[5]中,视觉测程法被运用在判断自我运动和记录激光雷达的数据。这个称作Zebedee的设备被用在组成一个2D激光扫描仪上[6],并需要刚性连接在惯性测量单元IMU上,这两者都弹性固定在一个移动的平台上。这种被动驱动的激光扫描仪需要对弹簧的机械性能进行仔细的建模。
当测距在不同时刻收到数据时,精确的6DOF 位置应该被估测对于记录这些点在一个固定坐标系。另外,它应该包含误差在这个发生的点云数据中。因此,有效的解决方案极大需要精确地评估这些位置并且精确地构造环境地图。
图2:方法概述:基于传感器融合的二维激光扫描位姿估计建立实时三维地图
最近,融合的6DOF姿态评估多模型传感器和全方向的环境感知已经收到了广泛的关注。在[10]中提出了一种由视觉、激光扫描、惯性传感和GPS组成的河流勘探与测绘多模态感知系统。一个双重的3D激光扫描仪,三立体组合的相机、一个IMU和一个随身携带的电脑被融合来得到测量和建图在[11], 在[12]中,这个惯性制导系统,它能从不同GPS系统和IMU通过传感器融合,将多个线性传感器得到的数据被融合如点云数据。至于传感器融合,建立在可视和惯性测距的扩展卡尔曼滤波的低耦合方法已经被显示在[13],[14],在实时系统中[15]获得状态评估。本文采用了类似的方法对摄像机和IMU的测量数据进行融合。通过传感器融合的姿态评估,当点云数据被实时转换维键架,垂直面上的测距被重建。具体地说,通过点云数据单元和键架的记录关系,点云数据是最优的通过键架在视觉闭关循环中的纠正。
三、用2D激光扫描完成3D建图
A. 方法概述
在这个方法中,我们用一个安装在机器人上的2D激光扫描仪,在传感器融合的状态评估帮助下,得到了实时3D建图,如图2中显示。对于要求不在一个垂直的2D空间,快速测量数据组成距离和测量的角度值,安装在移动平台商店激光扫描仪是向上指向的。这种姿态评估方法建立在在线扩展卡尔曼滤波器上,而状态的判断由一个视觉SLAM系统的6DOF姿态评估IMU测试和更新。通过扩展卡尔曼滤波的精确和高频率姿态判断,符合当前激光扫描仪的点云数据能被记录在一个固定的坐标系。
图3:在不同的坐标系中,绿色的IMU相机转换和IMU激光转换被当作恒定值。红色部分向上了激光扫描仪在世界坐标系中的位姿。
- 传感器数据融合完成状态评估
为了得到稳健、精确的状态评估,我们建立一个基于扩展卡尔曼滤波的IMU辅助的视觉SLAM系统。图3显示了我们系统坐标系的解决方案。特别地,虽然相机位姿测量由视觉SLAM系统来完成滤波器更新,但状态评估由IMU来驱使。
IMU陀螺仪和加速度计提供旋转角和加速度的测量在一定误差b和均值为零的白高斯噪声n下,这个实际角速度和加速度在IMU框架如下:
=-- , a=--。
状态呈现如下:
在世界坐标系中IMU的位置组成状态,姿态四元数,角速度,陀螺仪和加速度计误差和,视觉比例因子, IMU坐标系的旋转进入相机坐标系表示,以及相机中点在IMU坐标系中的位置,和都被当作恒定值,并早已被校准。
根据[16]中的方法,我们通过不同的方程式进行传播状态变化。对于连续时间误差状态的不同方程式,连续时间系统噪音协方差矩阵,离散化误差状态传播和误差过程噪声协方差矩阵被校准。通过在[16]中的滤波方程,传播状态协方差矩阵能够被计算。
至于视觉SLAM,我们用流行的建立在ORB-SLAM2框架上的键架[17]通过一个REB-D相机。通过ORB特征[18]对于跟踪和建图任务和快速插入键架,它能提供位姿判断,那能更近一步地优化通过闭关循环和整捆调整。
通过来自视觉SLAM的位置测量,测量模型如下:
通过用作为符合IMU姿势的旋转方差并且用作为0均值,视觉测量的白噪声和高斯噪声。
位置误差被定义如下:
线性表示如下:
对于旋转测量,我们定义这个误差:
这个测试被堆积在以前如下:
对于测量矩阵,下列计算能被执行对于更新评估通过众所周知的卡尔曼滤波
- 剩余:
- 改革:
- 卡尔曼获得:
- 纠正:
通过修正,更新的状态变量能被计算。在[16]中的下列方程式,修正的四元数被预测,修感器稳健、精确、高频率的位姿评估。通过IMU坐标系和激光扫描仪坐标系之间的标准变化,当扫描仪收到测距时,我们能获得精准的位姿评估。特别地,激光坐标系的旋转和变换在世界坐标系中代表为和,当时间系数时,方位被表达为旋转矩阵。
图4:三维地图建立过程:将二维距离测量结果投影到笛卡尔空间激光帧中的点云中;通过姿势估计将点云转化为世界框架;将这些点云在两个连续关键帧之间组合成一个点云单元,该点云单元稍后可以通过闭环进行校正;将这些点云单元添加到一起,构建一个完整、一致的地图。
- 3D建图
如图4中显示的那样,上面列举的相关方法已经显示用2D激光扫描仪精确构建3D地图实时系统的方法被改良。用传感器融合的有力的和精确的位姿判断,符合2维测量的点云数据能够被转换成一个组合的协调实时系统。这些在两个连续的主框架点云数据能够被累积成一个点云单元。添加这些数据单元,一个连续的全球的地图能够被逐渐地建立起来。
安装在Turtlebot上的2维雷达扫描仪是向上指向的,对于获得测量距离在一个垂直的空间。它有270度的视角,它的最小测量单位是0.25度。
当测距在传感器平面的极坐标系内时,直接投影在笛卡尔地域能首先被获得,每个扫描方向坐标能简单执行从合适的角度:
成为第i个元素的扫描的距离矢量的角度,成为测量的范围值。
这些扫描测量获得在连续运动的不同时间,为了建立一个完整的、连续的地图,在扫描坐标系中获得主点云需要被转换成世界坐标系。扫描仪的位姿, 由转换和旋转组成,如下:
图5:用连续两帧之间的数据集合成一个主点云单元。
通过以上的转换,收到的单一扫描被实时覆盖和记录在世界坐标系。鉴于键架快速插入,连续两个键架的存储在缓冲器中的点云数据被堆积在一个单元像Fig5那样。因此,一组点云数据和一个一致的键架是相互关联的。整个3D点云地图将通过逐渐添加这些单元产生。
一个额外测试被用来提高地图的精度。在视觉SLAM的进程中,一旦一个循环被察觉,这个循环将会被纠正通过像素位姿最优化,并且一个已确定的位姿将会同时被纠正。通过合环前后获得的键架的位姿的转换 ,和键架有关的点云数据集合的位姿能被纠正为。
四、实验和结果
- 实验设置
实验中,我们所用的Turtlebot平台增加了一个Kinect传感器,一个惯性传感器IMU和一个向上面的激光传感器。传感器的转换被当作离线校准的恒定值。这个被推荐的3D地图系统运行在一个安装inter i5、1.7GHz CPU、4GB RAM的便携式电脑。它运行在乌班图的ROS[19]操作系统上。
- 本地建图结果
如图1显示,Turtlebot被用在一个Kinect、IMU的办公和记录,并且激光扫描仪被写入ROS 包文件。然后我们重新演示这个包用全速计算我们推荐的3D地图系统。建立在视觉惯性融合IMU的位姿被显示在Fig6,通过我们能够获得的激光扫描仪的位姿。自从Turtlebot移动到地板,在Z轴上的位姿估计保持了恒定值,旋转偏向角明显改变。
图6:基于传感器融合的IMU位姿估计。
- IMU的位姿估计帧到世界帧。
- IMU水平位姿估计帧到世界帧。
利用位姿估计将扫描帧中的主点云转换为世界坐标系。这些位于两个连续关键帧之间的点云累积成一个点云单元,如图5所示。整体3 d地图所示图1可以逐步加入这样的单元,它可以提供丰富的环境信息的实验。此外,一旦有一个循环中发现在视觉SLAM,点云的相关单位可以通过关键帧的修正。
此外,其他两个房间的3 d地图在我们实验室已建造了类似的实验,如图7所示。
- 结果评价
首先,我们能评价基于传感器融合的位姿估计结果通过对比如图1实验中的视觉SLAM。实验中Turtlebot在x-y平面的完整轨迹如图8显示。
图7:其他实验构建的3D地图。(a) 我们实验室的办公室地图。(b)会议室的地图的一部分。
图8:实验中Turtlebot在x-y平面的轨迹。
一个关于位姿估计的更详细的比较构成估计在y轴图9所示,其中一部分被扩大和并在图9中显示。不难发现,视觉SLAM的估计中存在较多的振动,主要是由于图像噪声和跟踪到的用于估计的良好特征数量有限。用红色标出的位姿估计表明,在视觉惯性系统中发生这种振动的几率较小。基于扩展卡尔曼滤波的融合,姿态估计比视觉SLAM估计更可靠、更准确。
提出基于传感器融合估计,全球3 d地图可以在实时测量的范围被投射到笛卡尔空间,转化为世界坐标系和组装成单位的点云,II-C教派中描述。表1显示了这些主要模块在我们的程序中每次执行的平均时间成本。
图9:位姿估计的性能。(a)视觉惯性SLAM与视觉SLAM对y轴位姿估计的比较。(b)与(a)中以黑色矩形标记的估计部分相对应的估计段。
五、结论与讨论
在本文中,我们提出了一种利用二维激
全文共9222字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[813]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

