
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
由SMA腱丝驱动的软变形手
摘要
大多数现有的开发机器人操纵器或人造手的方法都使用了刚性组件,包括关节,连杆,齿轮和电机。刚性机器人系统可以执行精确和铰接运动的任务,但需要复杂的集成反馈型控制系统。软机器人技术是一个新兴的研究领域,它使用可变形材料通过简单的集成机制来构建兼容和适应的系统,从而实现紧凑型系统的仿生行为。在这里,我们报告一种新型的肌腱驱动弯曲执行器使用智能软组合(SSC)和形状记忆合金(SMA)。首先,基于SMA线和滑动机构设计人造手指,其模仿人手的弯曲。这种人造手指具有柔软的铰链结构,以实现致动器的弯曲运动。进行了实验来评估人造手指的弯曲和负载阻力,并确定了最佳的材料组成。
使用不同数量的玻璃纤维片测量致动器的弯曲性能,并且就弯曲能力和负载保持能力e弯曲角度305之间的权衡关系而言,双层致动器显示出最佳性能,重量为20克,弯曲角度为61,重量为60克。
最后,使用四根肌腱驱动的SSC手指和拇指开发了原型机器人手,并且用各种形状的各种物体证明了抓握能力。
1.介绍
机器人操纵器已经研究了数十年,大多数方法涉及具有关节,连杆,齿轮和电机的刚性机械部件。刚性机器人系统通常设计用于在良好控制的环境条件下使用传感器提供反馈来执行精确和准确的任务。已经有许多关于刚性机器人操纵器和手的研究,通过运动建模和复杂的控制系统来实现抓取能力。 Jacobsen等人[1]和Butterfab等人[2]研制出的机器人操纵器表现出灵巧的手部动作,以及Ka-wasaki [3]报道了一种基于拟人特征的机器人手,采用伺服电机和传动系统。然而,这种刚性机器人手不能变形并且使其形状适应具有复杂几何形状的物体。因此,需要进行尺寸分析和复杂的控制系统以便掌握具有不同几何形状的物体。此外,当传统的机器人手与人交互时,刚性和刚度会导致安全问题。由于这些原因,需要采用不同的机器人方法,其中机器人的机械特性与生物材料的机械特性更相似。
软机器人已经发展到使用柔软和柔性材料来模仿生物行为,这些材料可以在致动期间变形。软机器人可用于使用简单的实现来创建兼容和适应性结构[4e7]。各种致动器已经用于软机器人领域,包括气动和液压系统以及诸如形状记忆合金(SMA),形状记忆聚合物(SMP),离子聚合金属复合材料(IPMC)和锆酸铅之类的智能材料钛酸盐(PZT)。气动执行机构已经被用来制造使用软质材料硅胶和橡胶的机械手[8,9]。液压致动器被用来制造仿生软机器人鱼[10],其使用嵌入式流体通道和工业夹具[11]。这些气动和液压系统展现出适应性和符合性;然而,需要额外的组件(包括压缩机,泵和阀门),这使系统变得复杂。
智能材料具有很大的生物仿生行为潜力,如弯曲和扭曲,而不需要额外的组件。这使得建立简单的结构成为可能,以模拟动物的连续和顺从运动[4]。有许多关于使用SMA [12e27],SMP [28e30],IPMC [31,32]和PZT [33,34]的软机器人结构的报告。
在软机器人技术中,快速原型(RP)技术也被广泛用于构建简单且兼容的结构。基于SMA的弯曲[16e18]和扭曲[21e24]致动器已经使用基于模制的制造技术与长丝沉积制造(FDM)相结合。同样,形状沉积制造(SDM)可以用来构建使用多种材料的结构[35,36]。
在这里,我们报告了由智能软复合材料(SSC)和SMA丝组成的柔软的人造手指,该手指用于构建柔软的机器人手。基于SMA丝的致动器被用于形成模仿人类手指弯曲的滑动腱机构,并且可以实现可变形的弯曲运动。为了实现使用SMA线的肌腱驱动设计,使用FDM技术采用多级制造工艺。作为人造手指的一部分,使用软铰链,这增加了弯曲变形。该结构使用软复合材料形成,使得人造手指能够实现显着的弯曲变形。考虑响应时间和抓握力,评估软机器人手指的弯曲性能以确定最优设计。使用基于SMA的人造手指和三维(3D)印刷的手掌,形成机器人手,其可以执行各种不同形状和尺寸的物体的抓握任务,而不需要辅助控制系统。
在本文的其余部分安排如下。 第2节描述了用于形成人造指状物的材料(即SMA和SSC)。 第三部分讨论了带有SMA丝和软铰链结构的滑动机构的设计,以及柔性假手指的制作过程。 第4节介绍了理论模型,第5节介绍了使用不同数量的玻璃纤维薄片的腱驱动软启动器的实验,以确定执行器的最佳组成。 第6节描述了一个柔软的机器人手的设计,以及对不同物体抓握性能的完成。 第7部分总结了论文并讨论了未来工作的方向。
2.材料
2.1。 形状记忆合金(SMA)
SMA已经用于各种领域,并且展现出记忆效应,从而可以恢复原始形状。 它显示线性驱动,但可以通过与系统交互来模拟驱动,弯曲和扭曲两种模式。 利用这些特征,可以获得连续运动,如曲线运动和流线型运动,这些运动对于使用基于电机的设计进行仿真具有挑战性[37,38]。 已经有许多关于使用SMA丝实现生物模拟运动的致动器的研究。
弯曲致动器和扭转运动也被报道,这是由SMA导线产生的[21]。 复杂的仿生行为可以使用基于SMA的执行器来实现,并且已经开发出仿生机器人,包括人造章鱼臂[39]和龟鳍[40]。 李等人提出了一种可变形的人造手指。 [15]使用嵌入式SMA带和传感器。 Seok等人 文献[12]报道了一种基于Ni-Ti合金丝的蠕动驱动的软机器人,并且一个刚性的人造手指已被重新移植,该移植使用了肌腱驱动的SMA丝[41]。
虽然Ni-Ti合金(镍钛诺)被广泛使用,但SMA有几种不同的组成。 在该研究中,使用Ni-Ti合金的商业实施(Ni:50.4%,Ti:49.6%); SMA的物理性质列于表1中。
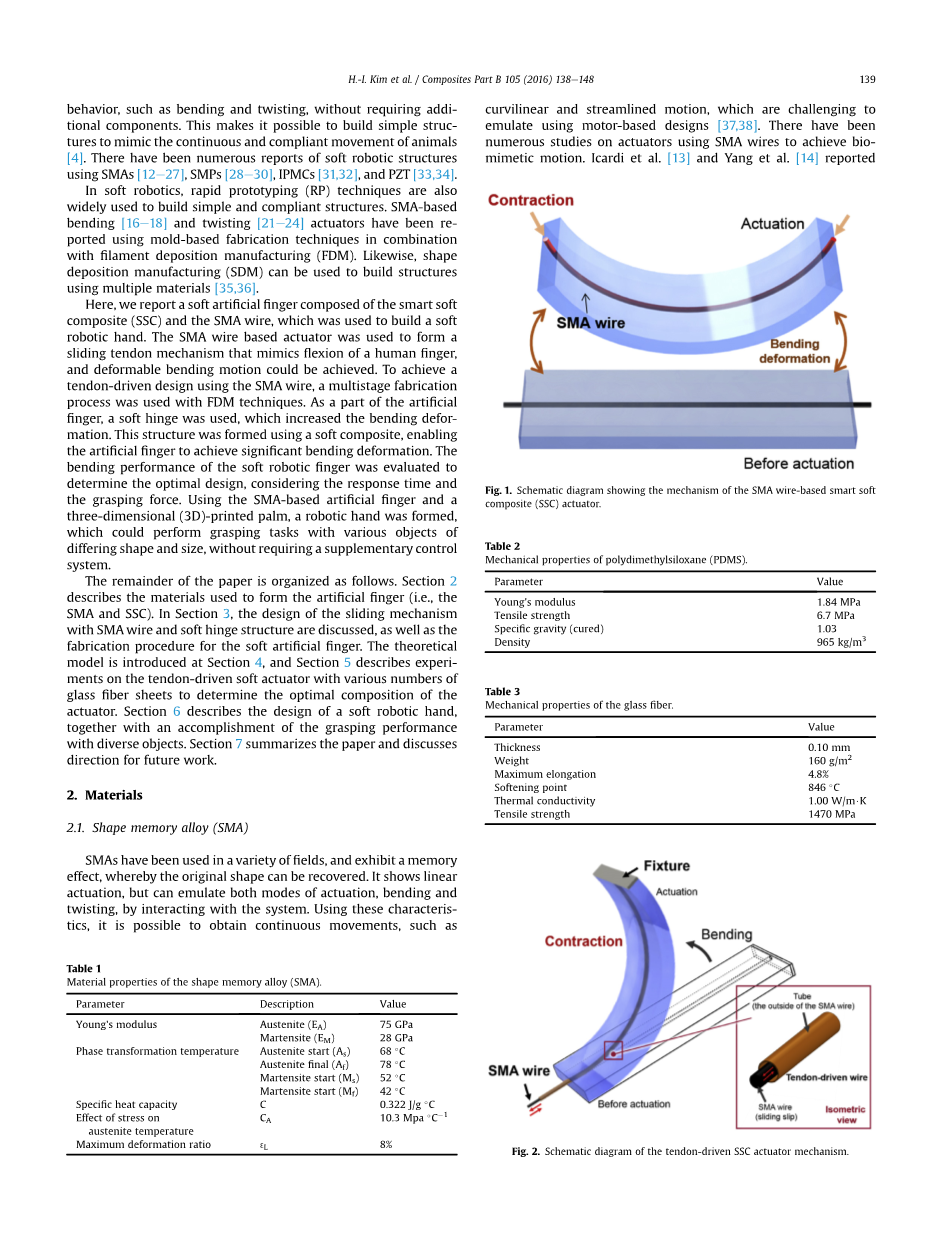
图1显示了基于SMA导线的智能软件的机理示意图复合(SSC)执行器。
表2
聚二甲基硅氧烷(PDMS)的机械性能。
表3
玻璃纤维的机械性能
图2.肌腱驱动的SSC执行器机构示意图。
2.2。智能软复合(SSC)
建议SSC通过在单个系统中插入驱动源来产生轻量级变形结构。使用这种方法,可以实现多维变形,如面外/面内弯曲和扭转运动[42]。智能复合材料的复杂驱动是可能的,因为层压复合材料层可以提供各向异性的材料组成,其中智能材料作为软聚合物基体中的驱动源。可以通过改变每种材料的组成来设计SSC的机械性能和变形行为。图1显示了基于SMA的SSC执行机构的基本弯曲机制。当SMA丝通过加热收缩时,由于SMA丝的偏心,致动器显示出弯曲和扭曲变形。致动器的运动可以通过改变导线的位置和元件的方向来改变。弯曲[16e20,43]和扭曲[21e24]可以使用SSC进行。此外,通过控制各向异性层和SMA丝的排列可以实现多维运动,这可以模拟复杂的生物学行为[25,40]。
为了扩大SSC的应用领域,开发并展示了利用各种纤维(玻璃纤维,碳纤维等)的编织型SSC。 这种方法可以用来创建一个变形结构,在轻量级系统中表现出较大的面积变形。 Wu等人 文献[18]报道了一种带有嵌入式SMA丝的编织SSC执行器,其具有形状保持能力的双向平面内弯曲。 基于编织的SSC,已经报道了变形结构,包括用于无人驾驶飞行器的小翼和后置的螺旋桨。
图3.基于SMA线的肌腱驱动的人造手指设计。
图4.人造手指的制作过程。
图5.肌腱驱动SSC的实验和模拟结果的比较弯曲致动器
3.1。肌腱驱动的SSC弯曲执行器
人的手指可以表现出大约270度的弯曲弯曲角度,使用外部肌肉收缩,肌腱从指尖延伸到前臂。手指中的三个关节可以进行弯曲运动。从手指的这些特征来看,我们设计了一种人造仿生手指[45]。
基于SMA丝和SSC设计了一个致动器,以提供基于腱的机构的大应变。图2示出了基于腱的致动器的示意图。 SMA丝嵌入结构中,并在管状限制结构内呈现滑动运动,从而导线总位移可使整个身体变形。 SMA线嵌入式设计的传统致动器可以展现足够的功率密度;然而,中风是有限的。相比之下,SMA弹簧通常表现出200e300%的应变,但该力通常不足以用于抓握应用。为了克服SMA线驱动器的这些限制,这里使用的SMA滑动机构不仅通过SMA线的延伸行程提供弯曲变形,而且通过SMA线的收缩提供了足够的抓取能力。
放大SMA丝变形的软铰链设计与滑动结合,以提高弯曲性能。柔软的铰接区域比其他区域更柔顺;因此,可以实现SMA线的大位移。三个软铰链部分可使执行器获得与人体手指相似的弯曲行为,该手指具有三个关节。图3显示了人造手指的细节设计;还展示了3D打印的指尖,该指尖可防止SMA线从结构突出并提高抓握能力。
图6.肌腱驱动SSC弯曲执行器的照片,说明功能组件。
3.2。制造
使用FDM和计算机辅助设计(CAD)技术,肌腱驱动的SSC执行器分多步制造。图4显示了制造过程。首先,使用RP机器制造底模,然后将其固定到板夹具上(图4(a))。 SMA丝然后用管子覆盖以实现滑动运动,并且在该板上布置一对电线(图4(b))。将PDMS倒入模具中以形成软复合基体(图4(c))。然后将玻璃纤维织物作为交叉层放置在底部模具中(图4(d))。将上模放置在织物片的顶部,插入PDMS以填充剩余体积(图4(e))。在55℃固化5小时后,将致动器从模具中取出(图4(f))。在此过程中,PDMS缓慢渗入玻璃纤维板并覆盖玻璃纤维织物和SMA线之间的缝隙。玻璃纤维支撑整个结构,并且PDMS与复合材料和SMA线完美结合。因此,通过SMA钢丝绳驱动机构的收缩,致动器可以稳定地变形。
图7.用于表征弯曲性能的实验装置。
图8.测得的执行器弯曲角度:(a)无负载和(b)有外部负载。
4.模型
为了预测所提出的SMA腱驱动的SSC致动器的变形行为,基于展现出大的弯曲变形的SMA的热机械模型来描述数学模型[20,22,25,46]。 SMA丝的热机械行为是用柔性梁形致动器的机械性能致动致动器的控制部件。为了推导和简化致动器的模型,已经做出以下假设。首先,沿着光束施加的力F被均匀地分布并被假定为与光束垂直。其次,变形在一个方向上产生,不包括剪切,扭转和轴向变形。第三,每条SMA线的位置在驱动的整个过程中保持其原始位置。而且,由于刚性部分的变形量与总变形相比是边际的,即使轴向负荷能够收缩刚性部分,也只考虑发生在柔性铰链部分中的弯曲变形。通过使用欧拉 - 伯努利梁方程,执行器的端部边缘偏转角度可写为在哪里是软铰链部分的收缩长度腱驱动的手指是软铰链的弹性模量部分,是软铰链部分的横截面积,d是SMA丝与致动器的中性轴之间的距离,I是软铰链部分的面积惯性矩。
其中n是用于驱动的SMA线的数量基于矩阵的执行器,并且是横截面积SMA线。 解释相平衡和转换SMA执行器的动力学,Liang和Rogers,Brinson和Boyd-Lagoudas已经表达了一个数学模型,形状记忆材料的行为。 考虑到“三维SMA材料模型,这是一个相关函数包括胡克定律,马氏体分数的变化,和热膨胀,执行器的本构规律是派生.
图9.各种电流下弯曲角度与时间的函数关系:(a)单层,
(b)两层,和(c)三层玻璃纤维板。
图10.各种数量的玻璃纤维层的弯曲角度与负载的函数关系床
单(一层,两层和三层)。
5.实验
5.1。实验程序
进行了几项测试来评估弯曲能力,人造手指的灵活性,包括响应时间和弯曲用不同数量的玻璃纤维板进行力测试。该玻璃纤维板的数量有决定性的重要意义致动器的特性;补偿之间的相互作用观察响应速度和弯曲能力。通过本实验中,执行器的最佳组成是主要目标以获得足够的实际应用能力,机器人手。出于这些原因,进行了实验验证执行器的响应时间和外部提升力加载。手指致动器样品用以下di-尺寸:长110毫米,宽16毫米,厚3毫米,带有一个1.4毫米厚的软铰链。两根200毫米长的SMA电线嵌入样品中,如图6所示。主动式SSC弯曲执行机构由SMA丝,玻璃纤维 - ber织物和PDMS。图7显示了用于表征的实验装置肌腱驱动的手指,其中保持标本和SMA丝两个夹具。 SMA导线固定在两侧,一个在指尖上另一个在夹具上,但它仍然可以在管状盖中滑动。另外,人造手指的末端与另一个手持以显示其最大变形角度。弯曲性能分析使用电流控制器,一层和主电脑。输入电流连续施加到致动器直到达到最大变形。该人造手指的弯曲角度是变化的,这是一个抓握表现的一个重要方面(图8(a))。提升能力测量与外部各种弯曲角度从10g加载到60g(图8(b))。
5.2。结果
执行器的弯曲性能用各种数量的玻璃纤维板用于制造人造手指。每个执行器的弯曲变形用0.3e0.8A的恒定电流测量。图9(a)显示了弯曲角度与时间的函数关系单层玻璃纤维织物弯曲角度没有超过200当角度达到饱和时需要15秒施加电流(0.3e0.5 A)小于最佳电流SMA线0.66 A.在0.6 A时,执行
全文共7802字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9438],资料为PDF文档或Word文档,PDF文档可免费转换为Word

