
英语原文共 15 页
用于电动车辆的双输入无离合器动力换档变速箱的上电换档
摘要
本文的目的是研究利用固定和多速齿轮比的组合的双电动机电动车动力系的实际应用。为实 现无扭矩孔的上电换档,最大限度地提高整体效率,采用高速电机作为连接多速无离合器自 动手动变速器的主电机,采用低速大扭矩电机作为辅助电机连接固定齿轮比的最终轴。使用 改进的模型预测通量控制方法结合同步器机构致动来控制电动机扭矩和速度,以最好地填充 扭矩孔以改善驾驶性能和驾驶舒适性。为了评估所提出的系统,建立了完整的数学模型并与 传统的单电机传动系统进行了比较。在最终轴扭矩,加速度和车辆颠簸方面的详细瞬态动态 结果证明了所提出的动力系的有效性。
- 介绍
为了满足减少废气排放的需要,加强对车辆排放的监管已成为全世界的趋势。这是设计更环保车辆的驱动力。因此,对电动汽车和混合动力汽车的需求飙升,推动了国际汽车工业的发展进入了一个新的阶段。为了实现制造更清洁,更高效的车辆而不损失驾驶性能和舒适性的目标,许多创新设计已被提出并证明是成功的。普锐斯在保持驾驶平稳性的同时大大降低了油耗,赢得了声誉,但普锐斯的eCVT变速箱系统仅用于混合动力汽车。还有一些成功的纯电动汽车,如日产Leaf,三菱iMIEV和早期特斯拉。它们都采用单一固定比传动系统,具有制造成本低,动力总容积相对较小,动力传动系统质量较小的优点。这种传输的局限性也很明显。首先,动态性能差,因为速度和扭矩范围受到损害;其次,由于电动机具有随扭矩和速度变化的自身效率曲线, 因此整体运行能量效率较低。
为了克服单一固定比变速器遇到的问题,多速变速器的发展引起了相当大的关注。它使电动汽车的效率更高和更好的纵向行为。用于多速变速器手动变速箱(MT)的效率最高,约为96%,自动变速箱(AT)的效率约为86%,但可以传输大扭矩作为MT。连续变量传输(CVT)以其平滑性而闻名,但整体效率为85%。基于这些传动的基本原理,已经设计了许多新颖的配置。实现了无离合器自动手动变速器(CLAMT)的详细变速机构和控制策略,实验结果证明,在不影响动力性能的情况下,可以去除电动车辆中AMT的摩擦离合器。采用行星传动 构建无缝双速动力分配系统。将双离合变速器引入纯电动汽车,并通过仿真和实验评估其详细的瞬态动态性能。通过改进传统的行星齿轮箱,实现了不间断机械传动的新概念。提出了一种新颖的四轮驱动双速电动车布局。为车轴设计了两套电动传动系统,通过控制两个动力传动系统的行为,实现了扭矩孔补偿,既提高了驾驶性能,又提高了驾驶舒适性。除了传动配置的新颖性外,许多研究人员还通过增加各种数量的电机来提高驾驶性能和舒适性,带来了一个板载配置,电机安装在车轮上,可直接提供所需的速度和扭矩。
在上述配置中,自动手动变速器(AMT)是一种很有前途的解决方案。
动力性能和乘坐舒适性要求,具有效率高,制造成本低,重量轻的优点,作为手动变速器和自动变速器的自动变速能力。但AMT也有其自身的缺点,即换档期间的颠簸,摩擦部件的过度磨损以及换档过程中的扭矩中断。为了提高驾驶性能,提出的扭矩辅助AMT,它使用伺服辅助离合器来代替第五档同步器,当发动机与动力传动系统断开时,第五档同步器将提供一定的动力,但辅助离合器没有自己的动力源,这意味着它不能消除扭矩孔但减轻它。提出了一种名为Inverse-AMT的改进型AMT,它将摩擦离合器置于齿轮后面而不是它们之前。实验结果证明它在一定程度上解决了扭矩中断问题。
大量研究证明,传动系统中的两个主要寄生损耗源是摩擦离合器元件和电液执行器。由于离合器阻力和油泵,整体效率降低了4%-6%。通过比较,使用无离合器变型可大大降低变速器整体效率的降低是可行的。对于采用内燃机(ICE)的传统车辆,由于发动机可控性差导致的速度和扭矩调节延迟,AMT中的离合器是不可避免的,这也需要长时间的 同步持续时间并且加剧了磨损摩擦片。但电动汽车并非如此,有三个原因首先,电动机的惯性远小于ICE的惯性,这使得它能够迅速地改变速度。其次,由于优异的低速控制能力,通过控制电动机,车辆可以顺利发射。第三,很容易将电机从扭矩模式更改为速度模式,反之亦然。因此,在同步器脱离齿轮后,电机可以转换为速度模式,输出很小的扭矩但是立即达到目标速度,然后变回扭矩模式。因此,摩擦离合器被移除。此外,由于具有宽的高效率范围,出色的速度调节 能力和快速的扭矩响应特性,EV的传动系统需要更少的传动比. Zeroshift是一个通过重新设计爪形离合器以接合不同齿轮而不需要速度同步来移除摩擦离合器的示例。采用一系列可控单向离合器实现档位选择。在控制策略方面,通过改进控制算法,不仅可以去除摩擦离合器,还可以去除同步器。并在发动机和电动机的速度和扭矩协调控制,使其不必具有离合器。旨在设计一种能够最大限度地提高能效,减少排放的传输系统,并且具有一定的可靠性。
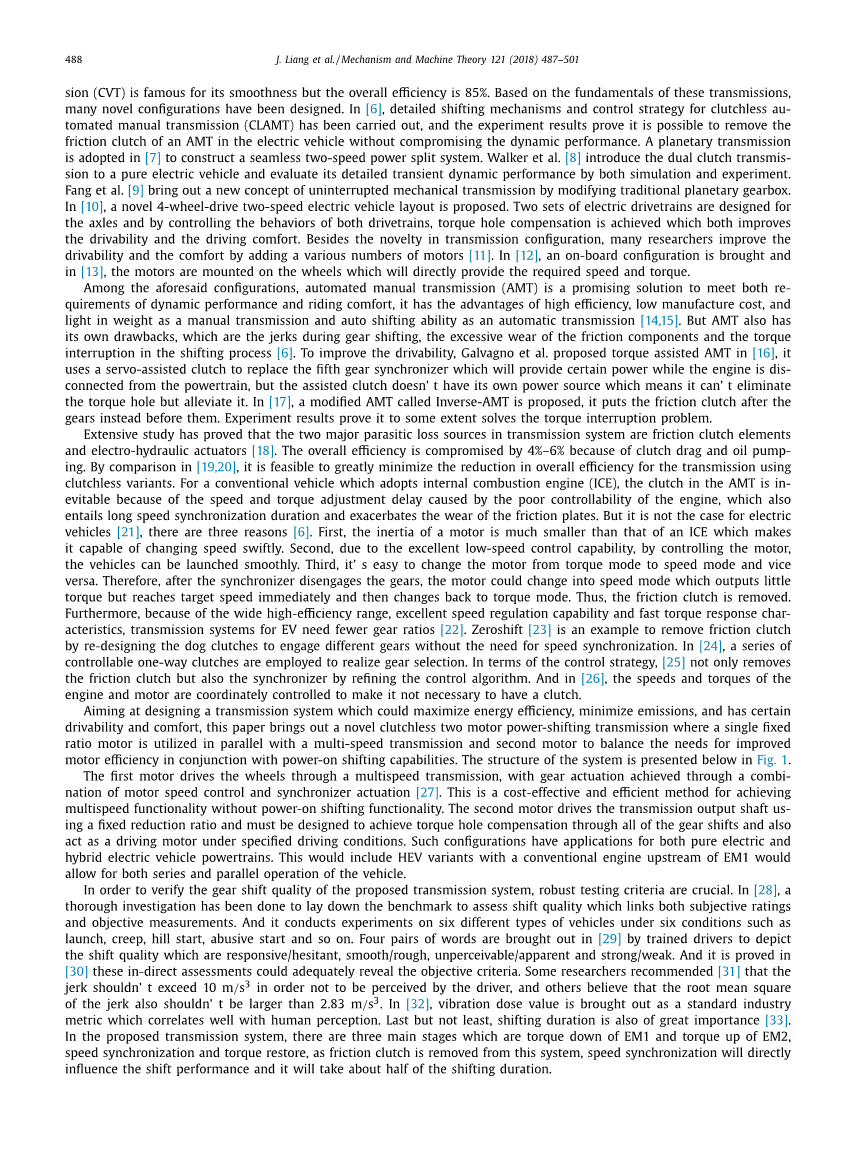
本文介绍了一种新颖的无离合器双电机动力换档变速箱,其中单个固定比率电机与多速变速器和第二个电机并联使用,以平衡提高电机效率的需求以及通电转移能力。该系统的结构如下所示图。1.第一台电机通过多档变速器驱动车轮,通过电机速度控制和同步器驱动的组合实现齿轮驱动。这是一种经济高效的方法,无需上电换档功能即可实现多速功能。第二个电机以固定的减速比驱动变速器输出轴,必须设计成通过所有换档来实现扭矩孔补偿,并在特定的行驶条件下充当驱动电机。这种配置适用于纯电动和混合动力电动车辆动力系统。这将包括具有EM1上游的传统发动机的HEV变体允许车辆的串联和并联操作。
为了验证所提出的传动系统的换档质量,稳健的测试标准是至关重要的。进行了彻底的调查,以制定基准,以评估将主观评级与客观测量联系起来的班次质量。并在六种不同类型的车辆上进行实验,包括发射,爬行,坡道起步等六种情况。由经过培训的驾驶员来描述变速质量,这些变速质量是响应/犹豫,平稳/粗糙,不可感知/明显和强弱。它被证明了这些直接评估可以充分揭示客观标准。一些研究人员推荐为了不被驾驶员察觉,加加速度不应超过10米/秒3 ,其他人认为加加速度的均方根也不应大于2.83米/秒3。振动剂量值作为标准的行业指标被提出,其与人类感知良好相关。最后但同样重要的是,改变持续时间也非常重要。在所提出的传动系统中,有三个主要阶段:EM1的扭矩下降和EM2的扭矩上升,速度同步和扭矩恢复,当摩擦离合器从该系统中移除时,速度同步将直接影响换档性能并且将需要转变持续时间的一半左右。
图1.两个电机无杂乱AMT配置。
本文的其余部分开发如下:第2节介绍了整个系统模型,包括多体动力学模型,电机模型和简化的同步器模型。第3节详细说明了换档过程中的控制算法,以及扭矩孔补偿曲线的开发。第4节提出了在电机上具有不同扭矩需求的上下换档组合的换档模拟。最后,第5节总结了提交的论文并根据结果得出结论。
2.系统建模和控制方法
在本节中,数学模型被开发用于正在研究的动力系统。正在建模的组件是:
bull;具有改进的模型预测通量控制的电动机;
bull;简化的同步器机制,假设一旦速度同步完成,参与过程就成功了;
bull;采用集总扭转元件的多体动力总成模型。
2.1.电动机模型和控制
为了最大限度地提高驾驶性能和驾驶舒适性,应精确控制电动机以跟随扭矩和速度曲线,以实现无缝的换档过程。现有许多高性能控制方法例如磁场定向控制(FOC),直接转矩控制(DTC)和模型预测转矩控制(MPTC)。FOC将定子电流分解为转矩和磁通分量,这些分量将由比例积分控制器分别在同步帧中调节,并使用调制模块产生最终的选通脉冲。它将实现高扭矩和磁通控制性能,但也需要微调工作。DTC是一种通过简单结构提供快速动态响应的有效方法,但它会产生高稳态扭矩波动。MPTC 以直观的概念,高灵活性和容易纳入约束来获得信誉,但繁琐的定子磁通加权因子调整工作限制了其应用。
为了克服电动机控制方法中的上述缺点,采用改进的模型预测通量控制(MPFC)方法。不像传统的MPTC需要在转矩和定子磁通的控制变量之间产生适当的加权因子,MPFC将这两个分量转换成定子磁通矢量,其中它们具有相同的单位,从而消除了加权因子的使用。
电动机可表示为:x = Ax Bu
其中是状态变量,是psi;定子磁通和i是定子电流,u = u是定子电压。矩阵A和B定义为
其中R和L是定子电阻和电感,下标s,r和m分别是定子,转子和相互的。是电动转子速度。
为了在下一个控制时刻预测x,采用二阶欧拉离散化而不是一阶
一个提高准确性:
其中T 是控制周期,是预测状态向量。
状态估计的准确性将直接影响MPFC的性能,这里采用全订单观察器:
其中x是估计状态,是用于提高稳定性的常数增益矩阵,b是负数不断增益。
由于延迟补偿,不仅应计算第(k 1)个瞬间的参考,还要参考在第(k 2)瞬间。该程序可归纳为:
在获得后,第(k 2)瞬间的的相位角可表示为:
其中是转矩参考值。最终的定子磁链矢量参考可以通过以下方式获得:
虽然消除加权因子可以节省大量的离线时间,但如果在整个控制周期内施加选定的电压矢量,则仍然存在转矩波动和电流谐波。为了进一步提高电动机的性能,必须在[0,Tsc]期间优化所选矢量的切换时刻,其表达式为:
其中是电压矢量的定子磁通斜率,下标old表示它应用于前一个控制的末尾周期,用于该控制周期中的所选电压矢量,是点积。
对于给定的电压矢量,在获得最佳切换时间后,可以获得第(k 2)个瞬间的定子磁链如下:
为了迫使定子磁通跟踪其参考并防止定子磁通的高偏差,可以建立成本函如:
其中是最佳切换瞬间的定子磁通矢量。
整体控制策略总结如下图2.
已经进行了比较图3 它显示了DTC,FOC和MPFC之间的扭矩响应性能,以证明所提出的MPFC的有效性。
可以看出图3 DTC和MPFC仅需要大约0.0003 s即可达到10 Nm而FOC大约需要0.0015 s,这意味着DTC和MPFC在动态性能方面更好。对于静态性能,FOC较好,纹波幅度约为1 Nm,而DTC的最大幅度为2.5 Nm。MPFC具有可接受的纹波幅度,即1.5 Nm。
在当前的响应表现中图4,FOC和MPTC具有相似的性能,在0.4秒内没有明显的谐波纹波,而DTC具有明显的失真,这将导致更多的损耗。
图2.建议的开关瞬时优化电动机控制图。
2.2同步器模型
出于本研究的目的,简化了同步器机构以捕获主要致动特性。它仅包括参与的速度同步阶段,并且后同步被认为是完全锁定的,其他参与状态被忽略。这是速度同步部件对于确保致动而言至关重要的结果,而其他阶段,例如爪形离合器接合,对于换档的持续时间并不重要。
因此,同步器模型减少为锥形离合器。锥形离合器扭矩描述如下:
其中是锥形扭矩,是动摩擦系数,是平均锥形半径,alpha;是锥角。对于同步器机构考虑理想的致动过程。同义词的通电和中性状态chronizer机制导致两种可能的接合状态,这些状态模拟如下:
其中是同步器负载,P是施加负载的大小。P的值基于启动简化机制的持续时间来设置,并且与在中找到的典型值一致。为了补偿在致动请求之后释放或接合同步器所需的时间,将采用小的时间延迟来维持这些特性。
2.3.动力总成动力学模型
两个电机CLAMT的动力传动系相对简单,如图所示图5,一个电机转子通过输入轴驱动多档变速器,无需飞轮,离合器或扭转减振器。第二电动机通过与变速器无关的第二固定比率驱动输出轴。由于所提出的系统的主要变化集中在传动系统从电机到轴之前的开式差速器,并且模拟系统的设计是为了验证概念及其有效性,而不是探索车辆的行为,后面的部件开放式差速器被简化以实现其主要功能。主要部件是元件M1和M2处的电动机,元件1处的输入侧传动部件,刚体减速齿轮和同步器机构(S),输出侧传动部件,包括用于元件2的最终驱动齿轮和差速器,轮毂和半部轴(3和5)和(4和6)车辆等效惯性。输入转矩包括两个电机转矩(TM1和TM2),(TSYN)锥形离合器转矩和(TV)车辆电阻转矩。
图3.(a)DTC,(b)FOC,(c)MPFC的扭矩响应性能。
其中Jn 表示任何给定动力系元件的惯性,Cn 表示阻尼系数,Kn 表示刚度元素,theta;n 表示旋转位移,其一阶导数表示速度, 其二阶导数表示加速度。n代表动力总成模型的第n个元素图5.i表示齿轮比,下标1表示任何给定的传动比,2是最终传动比,3是固定马达比。对于任何齿轮啮合的闭合传动状态公式。
车轮的动力可以相对容易地确定,如下:
其中CR为滚动阻力,g为重力,beta;为道路倾斜角,CD为阻力系数,rho;为空气密度,AV为正面区域,VV是线性车辆速度,MV是车辆质量,PV是在车轮上驱动车辆的动力。
图4.(a)DTC,(b)FOC,(c)MPFC的当前响应性能。
图5.无离合器AMT多体模型。
3.换档过程控制
换档方法如下图6,对于双电机换档,它有7个主要步骤,包括换档启动和扭矩恢复。转移的功能阶段总结如下:
1.电机扭矩减少
在此
资料编号:[3339]

