
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
油田实时多相流量计量的多传感器智能设备
摘要 - 本文介绍了一种用于实时测量石油、天然气和水流量的新型多相流量计量装置。它由多个电气和声学传感器组成,其信号被数字化并通过多层神经网络进行处理。这一最新设备使用多相流体的物理模型来降低参数空间的复杂性,同时提高其准确性。此外,为了克服电气传感器在40%-60%和90%以上含水率范围内的不确定性(即大部分多相流量计失效的范围),两个高频和低频超声波环传感器分别用于低和高气体分数。在内部实验室规模的多相流动回路中进行的实验结果表明,实现90%以上的气体分数的实时分类可以实现,相对误差小于10%。
关键词 - 人工智能,电容和电导探头,嵌入式系统设计,气体流量测量,多相流量计量,神经网络,超声波,含水量测量。
I.介绍
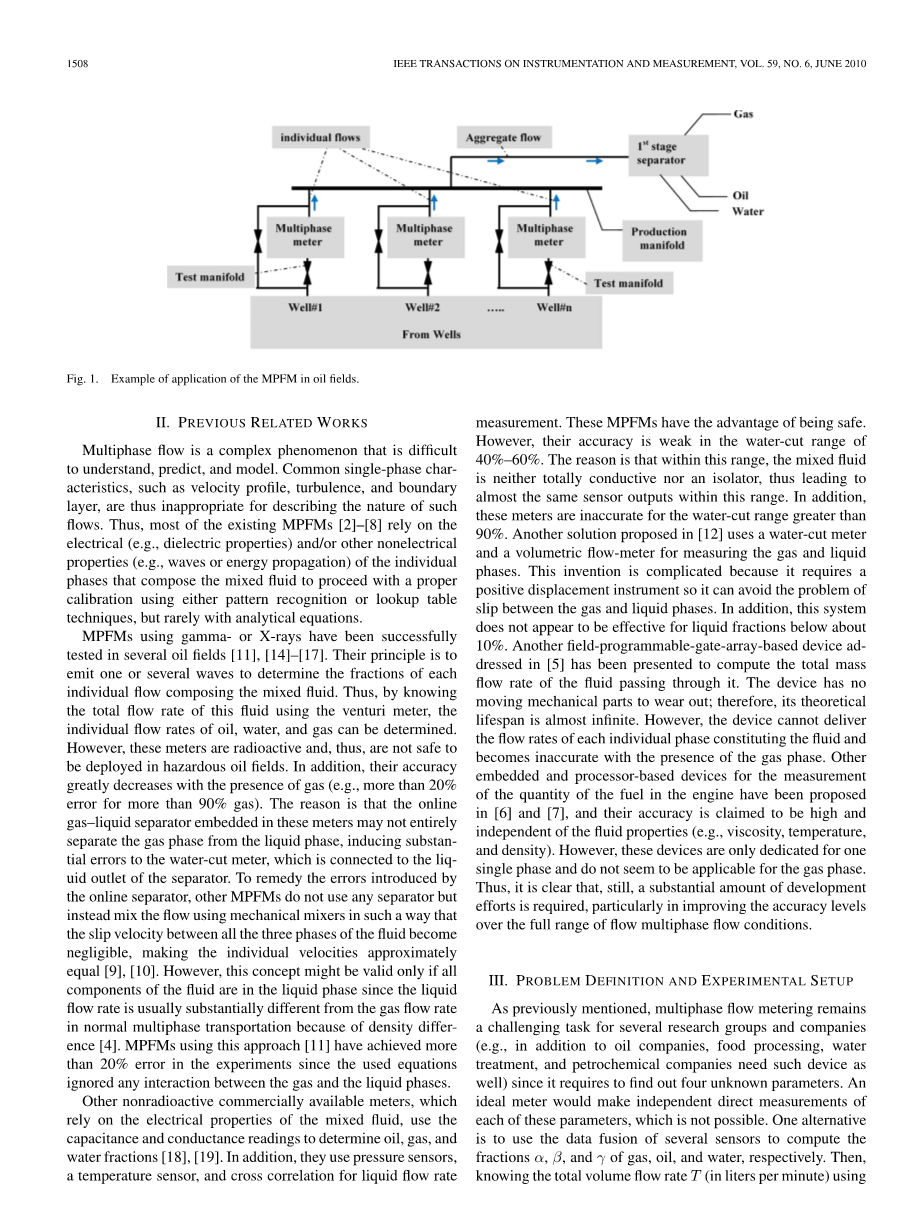
过程流体的体积流量的实时测量(例如,混合物的流速,单相流速和分数相体积)被广泛认为是石化工业过程控制中的一个关键参数,因为它有助于更有效的油藏管理。例如,在由多个附近井组成的海上采油中(图1),沿着给定井的管道部分采集的流量数据可以帮助识别这个井如何有助于聚集流量,并且因此可以帮助定位产量异常现象,如实际井中的水或气突破。这样可以更容易地进行油井增产或其他油井处理的本地化,例如提高原油采收率,以提高油井产能。在另一种应用中,多相流的井下监测允许井工程师通过充分控制该井中的阀阵列(例如,关闭被高含水流体围绕的阀)来更有效地控制来自实际井中油的传播。用于此类应用的合适仪器应能够测量组成混合流体的各相的流速,所述混合流体通常是油、水和气体。然而,这种称为多相流量计(MPFM)的仪器设计复杂,因为它必须确定四个未知参数(即油分,水分,气体分数和总流量),此外还有大多数可用的传感技术不能同时处理所有三个阶段。 因此,需要使用几个互补的传感器。处理三个未知参数(即油分,水分和总流量)已成功实现,在整个含水量范围内误差小于5%[1]。但是,这些仪表只有在使用笨重且昂贵的分离罐完成液体 - 气体分离后才适用。 因此,它们对于监测单个井的流量或远程陆上油田等应用来说是不切实际的。因此,越来越需要便携式,便宜且安全的MPFM广泛部署在全世界的油田中。经过大量研究已经完成,现有的多相流量计量仪器大部分属于以下两种主要技术:1)伽马射线装置和2)基于电介质的装置。 然而,这些设备要么不安全(因为使用放射源),要么在40%-60%含水率(即混合流体中水的百分比)或90%含水率以上的情况下不准确。 本文提出了一种新的非放射性的基于超声波的智能多传感器(IMS)多相流量计量装置,用于确定沿不同流体状态且没有预先分离气体的管线的一部分上的多相混合物组分的体积流量。 除了使流动均匀化之外,流体力学的一些性质被引入到模式识别算法中,并且已经导致将复杂的非线性多维空间分解为更简单的2-D非线性空间,可以通过专用的多层神经网络算法轻松的管理。 该系统结构紧凑,便于携带,已在实验室规模的多相流环路上实施并广泛测试,具有不同的流态,流体密度和流量。实验结果表明,对于高达90%的气体分数的实时分类可以实现10%的误差率。
图1 MPFM在油田中的应用示例
II.以前的相关工作
多相流是一个复杂的现象,难以理解,预测和建模。常见的单相特性,如速度分布,湍流和边界层,因此不适合描述这种流动的性质。因此,大多数现有的MPFM [2] - [8]依赖于组成混合流体的各个相的电性(例如介电性质)和/或其他非电特性(例如,波或能量传播)使用模式识别或查找表技术进行适当的校准,但很少使用分析方程。
使用gamma;射线或X射线的MPFM已在多个油田中成功地进行了试验[11-14]。它们的原理是发出一个或几个波来确定组成混合流体的每个单独流的分数。因此,通过使用文氏管流量计了解该流体的总流量,可以确定油、水和气体的单独流量。但是,这些仪表具有放射性,因此不能安全地部署在危险油田中。另外,它们的精确度随着气体的存在而大大降低(例如,超过90%的气体时误差超过20%)。原因在于这些仪表中嵌入的在线气液分离器可能不会完全将气相与液相分离,从而导致与连接到分离器的液体出口的含水量计有很大误差。为了补救由在线分离器引入的误差,其他MPFM不使用任何分离器,而是使用机械混合器混合流体,使得流体的所有三个相之间的滑动速度变得可忽略,使得各个速度大致相等[9],[10]。然而,只有当流体的所有成分都处于液相时,这个概念才可能是有效的,因为液体流速通常与正常多相运输中的气体流速由于密度差异而显著不同[4]。使用这种方法[11]的MPFM已经在实验中实现了超过20%的误差,因为使用的方程忽略了气相和液相之间的任何相互作用。
其他非放射性商用仪表依赖于混合流体的电气特性,使用电容和电导读数来确定油,气和水分[18],[19]。另外,它们使用压力传感器,温度传感器和液体流量的互相关测量。这些MPFM具有安全的优点。但是,其准确度在40%-60%的含水范围内很低。原因在于在这个范围内,混合流体既不是完全导电的,也不是绝缘的,因此导致在此范围内几乎相同的传感器输出。另外,这些仪表对于大于90%的含水量范围而言是不准确的。[12]中提出的另一种解决方案是使用含水量计和体积流量计来测量气相和液相。本发明是复杂的,因为它需要一个容积式仪器,所以它可以避免气相和液相之间的滑动问题。另外,该系统似乎对低于约10%的液体馏分不起作用。已经提出了另一种基于现场可编程门阵列的设备[5],该设备用于计算通过它的流体的总质量。该设备没有移动的机械部件磨损; 因此,其理论寿命几乎是无限的。然而,该装置不能输出构成流体的每个单独相的流量并且随着气相的存在而变得不准确。在[6]和[7]中已经提出了用于测量发动机中的燃料量的其他基于嵌入式和基于处理器的装置,据说它们有着高精度并且独立于流体性质(例如粘度,温度和密度)。但是,这些装置仅专用于单相,似乎不适用于气相。因此,很显然,仍然需要大量的开发工作,特别是在提高全流量多相条件下的精度水平方面。
III.问题的定义和实验装置
如前所述,对于多个研究小组和公司(例如,除了石油公司,食品加工,水处理和石化公司也需要这种设备),多相流量计量仍然是一项具有挑战性的任务,因为它需要找出四个未知参数。理想的仪表将独立直接测量每个参数,这是不可能的。一种替代方法是使用多个传感器的数据融合来分别计算气体,油和水的分数alpha;,beta;和gamma;。然后,知道总体积流量T(以升/分钟为单位)使用额外的传感器,气体,油和水的单独流速FG,FO和FW可以分别用下列公式计算:
FG(升/分钟)= Ttimes;alpha;
FO(升/分钟)= Ttimes;beta;
FW(升/分钟)= Ttimes;gamma; (1)
另一种替代方案是,在总体积流量可能无法测量的情况下(例如,如果三相中的一个是可压缩的并且因此不具有恒定的体积流量,这是气相的情况)包括测量总质量流量M(因为该参数总是恒定的)以根据以下等式提供流量:
FG(升/分钟)=M(千克/分钟)times;alpha;/rho;G
FO(升/分钟)=M(千克/分钟)times;beta;/rho;O
FW(升/分钟)=M(千克/分钟)times;gamma;/rho;W (2)
其中rho;G,rho;W和rho;O分别是在MPFM校准期间提供给MPFM的气体,水和油的密度。因此,如前所述,为了简化上述方程,一些仪表集成了在线气液分离器,分别计算参数alpha;和(beta;,gamma;)。另一种方法包括混合流量以提供相似的单独流量,只需要知道总体积流量T来解决单个流量:FG(升/分钟)= FO(升/分钟)= FW(升/分钟)= T / 3。然而,由于第一节已经提到的原因,两种方法在实践中都很难适用。本文提出的IMS-MPFM使用四种类型的传感器(即电容,电导,液体超声波和空气超声波传感器),以及多相流的物理模型求解参数alpha;,beta;和gamma;。参数M使用文氏管和差压传感器来解决。关于本仪表的更多细节在第五节中介绍。仪表的算法部分的校准和设计需要设计和开发多相流动回路(图2),在该回路中已经进行了大量的实验。在这个流动回路中,水和油从两个独立的2立方米的容器中以不同的方式和流量进行,而气相由气体压缩机提供。然后将这些流体混合以穿过测试中的多相流量计量装置。在回路的混合点之前,分别在水箱,油箱和空气压缩机之后插入三个单相流量计,即水,油和气体流量计。这些单相流量计构成模式识别算法的参考,以提供以下四个参考参数:
alpha;a = FGa/(FGa FWa FOa)
beta;a = FOa/(FGa FWa FOa)
gamma;a = FWa/(FGa FWa FOa)
Ma (千克/分钟) = rho;W times; FWa rho;0 times; FOa rho;G times; FG (3)
图2 三相流量回路框图
其中FWa,Foa和FGa分别是水,油和气体的体积流量(单位为升/分钟)实际值,如单相流量计所示。参数alpha;a,beta;a和gamma;a分别是气体,水和油的实际分数,Ma是实际总质量流量。这里的目标是设计适当的模式识别算法,以实时和高精度地生成尽可能接近实际分数(即,FWa,Foa和FGa,...)。 因此,在校准阶段,操作员通过调节储罐和压缩机的阀门进行操作,以提供(3)中流量的各种组合。 对于这些组合中的每一种,主计算机周期性地抓取FWa,Foa和FGa的值以计算参数alpha;a,beta;a和gamma;a,同时从IMS-MPFM的所有传感器收集数据。然后执行该仪表的离线校准以将新的参考矢量添加到参数空间中。 然后通过适当的模式识别算法来探索这些最新信息。图3显示了数据采样和处理任务的调度。模式识别程序通过定时器中断定期触发,以执行单相流量计或IMS-MPFM的其中一个传感器的数据采集。接下来是去噪和模式识别算法。对应于一个样本的整个过程需要2ms,每秒可处理500个样本,为我们的IMS-MPFM提供了处理总体积流量高达46 m3/ h的特性,因为管道直径流量回路是2英寸。
图3 数据采样和处理任务的调度
图4 通用文丘里流量计
IV.MPFM的物理模型
为了在各种流态下正确评估井中的气体和液体产量,需要一种依靠物理流体方程来确定其各自流量的方法以实现良好的精度。此处的目的是执行足够的特征提取以降低各种参数空间的复杂性。
A.使用文丘里探针确定总流量
安装在文丘里探头上的两个压差传感器(p1和p2)提供了通过它的总体积流量指示
(4)
其中D1和D2是文丘里喉管的较大和较小直径,p1和p2是这两个点处的压力值,并且rho;是流体密度。图4显示文丘里仪的通用图。
然而,等式(4)仅适用于不可压缩的流体,例如液体混合物,在气体存在情况下变得不太准确。这是因为通过仪表的气体量与参考气体表所测量的总体积不同。因此,直接将(4)引入模式识别算法会导致误差很大。在我们的例子中,我们使用以下公式来考虑质量守恒而不是体积流量:
(5)
图5 总流量,密度函数和文丘里探针
其中K是常数,取决于文氏管的参数D2和D1(图4)。图5显示了实际总质量流量的M函数曲线[与(2)中的参数M相似]。可以看出M是单调的并且围绕一条直线(Delta;)。因此,使用参数M作为一个特征来确定总质量流量可能是合适的。在图5中注意少于26000kg/h的质量流量的分离样本(例如,样本A,B和C)。这是由于压力传感器的限制[在(5)中的p1和p2],以准确地处理相对较低的压力值。使用额外的文丘里探头可以克服这个问题。
B.使用差压传感器和文丘里传感器估算流体密度
在多相计量中,垂直管道上的压差Delta;P是通过它的混合流体的密度rho;的函数,并且增加了其速度v,即
Delta;P (单位:巴(bar))=(rho; times; g times; h) (6)
图6 对于不同的质量流量范围,差压作为气体分数的函数
其中h是两个压力传感器之间的距离,e是一个常数,取决于管道的内径d;摩擦系数f和混合密度rho;(e = hfrho;/2d)。这个公式可以提供关于通过仪表的气体量的有用信息。在仪表校准过程中建立的图6中的参数空间表明,随着气体量的增加,Delta;P趋于减小。此外,由于文氏管传感器测量的相应流速不同,即(6)中的第二项的影响,一些样本(样本A和B)已经被发现为不同气体部分提供相同的压差。值得注意的是,图6所示是通过将样本聚类到质量流率M的不同相邻范围内而获得。在每一个聚类中,计算对应于相同气体分数的差压的平均值。因此,质量流量的相同值(例如,37000和40000kg/h的质量流量)在两个相邻范围内提供相同的样本。这将导出(6)的简单验证。第VI-D节将解释如何在组成模式识别算法的两个阶段中的第一阶段探索这个数字以确定流体成分。
C.仪表校准过程中气体压缩率的补偿
正如在第三节中提到的那样,由于气相是可压缩的,因此通过一部分管道的气体的体积可能会在通过另一部分时发生变化。因此,由参考单相流量计测量的气体流量FGa可能与到达MPF
全文共16447字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14099],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

