英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
两种行星齿轮箱振动故障建模方法:比较和验证
摘要
行星齿轮箱是许多工业应用的重要组成部分。振动分析可以延长其寿命并防止昂贵的维修和安全问题。但是,只有正确理解行星齿轮箱的振动特性,才能进行有效的分析。在本文中,为了研究良好和不同的故障条件下行星齿轮箱振动的频率成分,因此建立了振动模型。在此考虑了两种不同的模型:现象学模型(基于观测的分析数学公式)和基于系统运动方程解的集中参数模型。两种模型的结果都不能直接比较,因为现象模型提供了固定的径向振动,例如安装在齿圈外部的振动传感器的测量结果。另一方面,集中参数模型基于固定在载体上的旋转参考系来提供振动。为了克服这种情况,因此提出了一个将集中参数模型解决方案分解为固定参考系的函数。最后,对模型观点和实验测量结果进行比较。
1.前言
行星齿轮具有质量轻,扭矩大的优点,因而被广泛应用。例如在直升机变速箱,起重吊车,风力涡轮机和矿业挖掘机。众所周知,振动分析可以有效的避免昂贵的维修,缩短停机时间和减少对机器的关注度。然而,振动分析在行星齿轮中的应用并不是那么直接的,因为在机构中同时存在多种不固定的相互啮合副。这种情况将会导致齿轮副和传感器中的变速传动路径多种多样,这会使获得行星齿轮中的振动特性很困难。目前,行星齿轮中已经有了两种不同的模拟方法去研究振动特性:首先有一种现象学模型,考虑到系统运动学,来源于不同啮合过程的振动叠加可以直接用周期函数模拟。换而言之,这是一种解析模型。还有两有另外一种集中函数模型或者说动态模型,这种模型是基于系统运动的数值分辨率。
这种现象学研究源于三十年以前麦克法登和史密斯的工作,他们致力于研究主频率和齿轮啮合频率的不同。他们还用这个模型来解释在环形装置外安装的传感器测量的频谱的不对称性。几年后,麦克马斯用傅里叶级数来补充麦克法登和史密斯的作品。帕克和林研究了行星齿轮中每个齿轮副的振动阶段。Inalpolat和vicua通过将分析扩展到行星齿轮的不同几何形状来概括之前的工作。两种工作都采用了载波旋转引起的调幅效应(AM),但没有考虑啮合刚度变化或齿轮损坏引起的频率调制效应。冯先生在对他的作品的分析中包括了后者。最近,洪用傅里叶级数分析解释了在健康和有缺陷的行星齿轮中明显的故障特征频率模式。所有的研究都提出了一种模型,该模型可以带来传感器将被放置在图1中的测量值。
首先对集中参数模型的研究是确定行星齿轮的自然频率和振动模式的一种方法。为了这个目的,卡曼提出了一个扭转模型。然后,林在一个具有多重自由度的运动方程中进行模态分析。查里等人通过研究制造错误的影响扩大了先前的工作。此外,还有其他研究课题,如行星齿轮的负荷分担、非线性动力学和牙齿断层。在这些研究中,我们重点介绍了查里等人的工作,他们研究了齿的脱落和断裂的齿轮啮合刚度变化,虽然研究的不是行星齿轮。
与图1的固定转换器方案不同,一般来说,所有的参数模型解决方案都是在非惯性参考系下进行的,并与载体进行固定和旋转。在将解决方案与实验测量结果进行比较的情况下,我们需要知道在惯性基础上的振动,就像地面观察者所看到的那样。简而言之,光参数模型的解决方案与现象学模型的结果和齿圈测量的实际振动的结果没有直接的可比性。其他工作包括了集中参数模型,并给出了它们的解决方案,以表示固定的传感器响应,但没有给出用于获得解决方案的方法。其他作者提出了不同的方法在一个固定参考系的传感器测量中分解旋转参考系的解决方案,但他们做出了错误的假设:Inalpolat和Kahraman表示传感器测量的行星轮和太阳轮的动态性能的函数,没有考虑到他们啮合线方向的不同。托雷格罗莎和vicua提出了一个不同的函数,但是忽略了一个事实,那就是动态啮合线方向的方向随着轴的转动而改变。梁等人提出,传感器的测量是通过行星齿轮的加权振动的总和得出的,它不考虑其他行星齿轮组件的振动,如环、太阳轮和箱体。最后,Karray等人将一个传输误差函数包括在在啮合线上,解释了振动的侧带模式,因此不正确地包括了齿轮啮合的人工调制。
此研究探讨了在良好和故障的条件下,利用集中参数模型和现象学模型,来研究一种均匀分布的行星齿轮的频率内容。故障被认为是太阳齿轮、行星齿轮和齿圈的局部故障。为了将光参量模型与现象学模型结果和实验测量结果(考虑到与局部故障有关的额外频率分量)进行比较,我们提出了一种方法,这种方法为旋转框架的分解提供了一种解决方案,用于固定参考系振动。
2.行星齿轮箱振动模型和框架分解
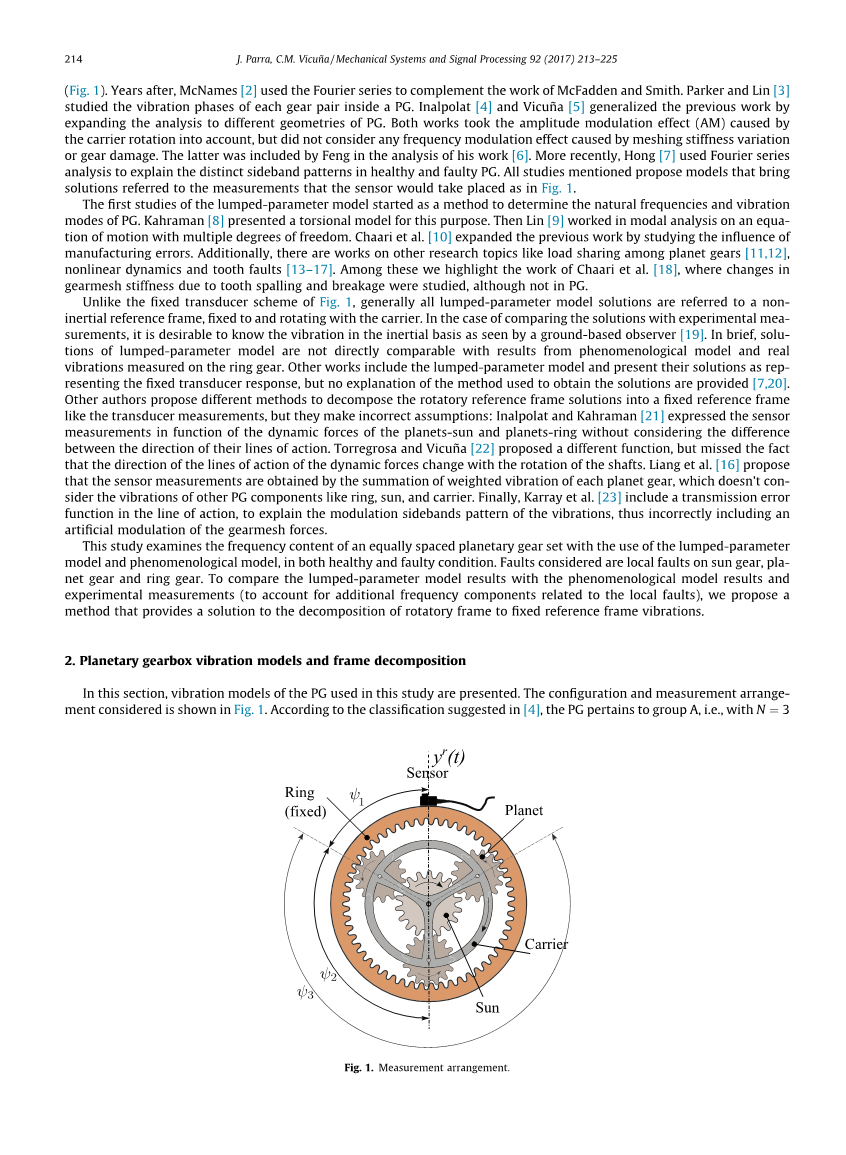
在本研究中,介绍了使用的行星齿轮的振动模型。配置和尺寸安排如图1所示。根据4的分类,行星齿轮属于A组,即A组。在角位置上,N=3相等的行星齿轮Psi;i(i=1;2,hellip;hellip;;N和Psi;1=0),和相啮合的齿轮啮合。齿轮的齿数是z=18(太阳轮),Zp=26(行星轮),Zr=72(齿圈)。
图1尺寸设计
2.1现象学模型
该模型将在5中进行详细描述,并根据图1的安排将测量结果直接描述为传感器。它将所有齿轮对的振动模拟为周期函数,基本频率等于齿轮啮合频率fg=Zrfc(fc是载波频率)。图2给出了一个只考虑行星齿圈啮合仿真例子。单个行星环振动与相对应的相位差异Psi;i /2f c可以在图2a中看到。每个行星环的传感器测量齿轮啮合振动作用,包括固定传感器和行星变量之间的各种传输路径产生的调幅效应表示在图2 b中。在图2b中显示了总传感器测量值并且图2c显示了它的频谱。注意,该模型定性预测了行星齿轮的振动频谱。例如,在这个例子中它表明行星齿轮的振动测量值会产生与其组成的齿轮啮合频率件(行星齿轮与其他的配件组合可以产生任何组件齿轮啮合频率(1、2、4、5))。得到的结果是,频谱只有在频率f/f c = pN (pisin;N0)上的分量,如2,4,5,7所报告的。其他行星齿轮组可以通过改变几何参数(行星齿轮数、行星位置和齿数来模拟。
2.2集中参数模型
图3所示的集合参数模型如图3所示。它为平面内的情况设计了一个激励行星齿轮。它由一个齿圈、一个太阳轮、一个载体和N个行星齿轮组成。每一个元素都有三个自由度(DOFs):两个平形运动和一个旋转运动。对于所有的构件,旋转自由度表示为wk(k=r;s,c,1;2,hellip;hellip;;N),齿圈,太阳轮和载体用和(j =r,s,c)表示,用和对行星齿轮(i 1;2,hellip;N),平形自由度固定在载波参考系上(X;Y)的角频率Xc上。轴承和齿轮中间为线性弹簧连接。齿轮啮合弹簧作用于相应啮合作用线。在齿圈和行星齿轮之间的啮合时,考虑了弹簧的刚度。同样地,太阳轮和行星轮之间的啮合物体是一个刚度为ksi(t)的弹簧。比例系数C是为了保证方案的收敛性。
运动矩阵方程是:
其中
是自由度的矢量,T是变速器的扭矩,F(t)是传动误差和齿轮离心率的力,矩阵如Eq.(1a)中所示,模型参数在【9,10】中详细的给出了。
2.3统计参数模型:结构分解
由于两种模型都考虑了不同的参考系,因此不可能对集中参数模型和现象学模型模拟的结果进行直接比较。惯性参考系(在现象学模型中)更有用,因为在实践中,振动是如何测量的。为了能够比较模型和实验测量的结果,我们提出了如下一种集中参数模型:
其中是传感器的振动信号,是固定在行星齿轮上的传感器运动产生的各种传感信号包括调制信号的影响(与现象学模型[5]中的相似),Omega;c=2pi;fc,行星轮和换齿轮啮合的压力角,是每一对行星轮齿和齿圈的齿轮啮合线上的作用力,后者可以被计算出是:
其中作用线的位移。它考虑到了行星齿轮和齿圈的振动,这和梁等人研究的结果是相反的,因为他们只考虑了行星齿轮的振动。可以注意到的是,尽管没有考虑到太阳轮的相互作用,这个结果仍然是可以被接受的,因为行星轮的运动在某种程度上是这种相互作用决定的。这与Inalpolat和卡纳拉曼的工作是一致的。Eq.(2)的最后一项 ,在传感器方向上执行齿轮力的分解(图4),并解决了在[21-23]中发现的其他解决方案的问题。
图2.现象学模型组成 (a)齿圈振动。 (b)每个齿轮的传感器测量信号 (c)传感器总振动的测量信号。 (d)总传感器振动的振动频谱。
图3集中参数模型
为了寻找理论传感器测量的频谱组成,我们提出了一种分析方法。对于这个,我们假设等于一个基本频率等于fg的函数。通过采用傅立叶变换来获得传感器测量的频谱结构,如下:
其中*表示卷积。考虑到Psi;i/2pi;fc作为行星轮初始阶段,我们有可能在Eq.(4)中重写函数的每一项。作为行星轮1的对应时间位移版本,如下:
图4齿轮力在传感器方向上的分解
其中,同时Psi;1=,, 请注意我们考虑到齿轮啮合力(i = 1;. .。;N)有相同的振幅和形状。他们只是在各自的相位有所不同。对这个问题我们在这一节的结束进行了分析。现在,我们把公式(5)中的第一项表示为傅里叶函数:
其中qisin;Z,它是一个指数,是的傅里叶系数。在这里,我们可以对采用傅里叶变换:
其中if x=0, ;if x=1,公式(5)中的第二项和第三项也如法炮制,最后获得的的傅里叶变换为:
其中个,g,hisin;Z是指数,和分别是的傅里叶系数。
从公式(8)中我们可以看到当f=(q h)fc gfg时频谱有非零值。另外,仅当是N的整数倍时,。现在,回到之前关于齿轮啮合的考虑:它的振幅和形状在各自的阶段是不同的。如果这个条件不满足于齿轮啮合力(i = 1,hellip;hellip;,N),那么结果表明,利用所提出的公式,得到了现有分量振幅变化的频谱,得到了f c附近的新故障特征频率的出现。这些结果符合2,4,5,7。因此,该分析表明,利用所提出的分解方法,从集中参数模拟结果中获得的频率内容在理论上与从现象学模型得到的相同变量的频率内容相等。
3.故障模型
在这一节中,使用前一节介绍的两个模型来模拟故障。结果给出了三种不同的故障:行星轮、太阳轮和齿圈的局部故障。
3.1步骤
考虑到它们的不同,提出了故障建模的方法,并分别给出了现象学和集中参数模型。
3.1.1 现象学模型
在模拟过程中,我们采用周期性的信号来调节正常的振动波形,这种波形是由齿轮在一个有缺陷的齿和另一个正常齿啮合时产生的。图5给出了一个有故障存在的振动例子。通过图5a所示的函数的乘法和图5b所示的正常振动,模拟了故障振动波形(图5c)。上面提到的函数的值是1,除了周期为1的区间。在每一段时间内,函数都被定义为一个振幅为Ap的汉宁窗,从这个例子中,我们认为局部故障被限制在一个齿轮啮合周期为;因此,每个汉宁窗的持续时间是Tg。相关的故障频率包括本地故障和相位差的扰动函数作用在不同的行星轮上的振动,这些在表1中已经列出,fp,fs和分别是行星轮、太阳轮和载体的运动频率。
3.1.2 统计参数模型
通过对齿轮啮合刚度函数的修正,模拟了集中参数模型的故障。在这项研究中,我们模拟了不同的层裂案例:一颗太阳轮齿,一颗齿圈齿,一颗行星齿轮齿。具体地说,有了这种类型的断层,可以观察到图6.[18]所示的刚度降低。减少的幅度和时间的长短分别取决于断层的宽度和长度。根据模拟故障的位置,在行星齿圈啮合刚度、行星和齿圈故障、行星太阳齿轮啮合刚度等方面引入了振幅的变化。表1给出了不同行星振动之间振幅修正的频率和相位差。
3.2结果
利用纽马克隐式法进行集中参数模拟,得到了运动矩阵方程(1)的数值解。得到了一个比例阻尼矩阵C= 0:07M 〖10〗^(-5)K,其中K是平均刚度矩阵。所有的建模参数都列在表2中。对于故障的实现,我们选择了50%的最大齿轮啮合刚度,选择了施帕尔仿真参数Ad,并选择了持续时间为0.5 Tg。与行星变速箱的特性相关的参数与用于实验测量的真实行星齿轮箱(第四节)的参数相一致,这些参数在表2中出。同样的齿轮箱是根据现象学的方法来建模的,在这种方法中,一个汉宁窗的振幅AP为 10被认为是故障建模。有必要说明一下,在这个研究中,由于是定性分析的,所以定义的模拟断层的是不相关的。
图5.现象学模型中的故障建模。 (a)扰动函数。 (b)无故障的振动波形。 (c)有故障的振动波形。
表1局部故障情况下扰动的频率和相位差
图6 模拟齿轮轮齿脱落情况下的齿轮啮合刚度
表2集中参数模型中的行星齿轮箱的参数
在图7-9中分别给出了行星齿轮箱中带有局部故障的行星齿轮、太阳轮和齿圈的振动波形和频率谱振动波形和频谱。在两个故障行星轮、太阳轮和齿圈模型的振动波形中观察到与故障频率相关的频率(见表1)。
在一个行星齿轮局部故障的情况下,用这两种模型得到的频率谱如图7c和7d所示,这两张图显示了在太阳轮局部断层的情况下,图8c和8d分别为现象学和集中参数模型显示了fg的频谱。在图8c中,可以观察到在nNfc以及间隔为nN()的多个故障特征频率。另一方面,集中参数模型的结果与现象学模型的故障特征频率组(第一个在图8d中没有标记)结果吻合。此外,在n有多个故障特征频率,在从f g测量的其他故障特征频率中测量到的fg,也就是n2z。
对于齿圈的局部故障,我们可以从两种模型的结果中看出,在nNfc中,这两种模型都有多个侧带,但在近距离观察的情况下仅在集中参数模型的结果中有多个侧带。
图7.行星齿轮故障时行星齿轮箱的模拟振动。 (a)现象学模型
全文共8472字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11477],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

